一种具有充电管理功能的机器人自动充电系统的制作方法
1.本发明涉及自动充电的技术领域,特别是涉及一种具有充电管理功能的机器人自动充电系统。
背景技术:
2.随着技术的发展和人们生活水平的提高,越来越多的移动机器人进入了民用消费和工业生产领域,给人们的生活和生产带来了便利,比如送餐服务机器人、物流搬运机器人、巡检机器人等。
3.由于移动机器人在工作时往往是移动状态,并且这种机器人多数采用电池供电的方式,长期工作的机器人充电显得很频繁,因此充电系统是其中最为重要的部分之一。当电池电量低于设定值时,移动机器人通过激光雷达、磁导航或图像识别等的探测引导自动移动至充电桩处,机器人本体上的充电极片与充电桩上的极片接触进行充电。
4.目前移动机器人的充电极和充电桩的充电极基本为裸露的接触式布置,为避免两边电极接触时产生火花现有方案采用定制带控制信号的充电器或者用微处理器和传感器的方式来控制主回路实现平时不充电时电极不带电。
技术实现要素:
5.为解决上述技术问题,本发明提供了一种具有充电管理功能的机器人自动充电系统。
6.本发明解决其技术问题所采用的技术方案是:
7.一种具有充电管理功能的机器人自动充电系统,包括充电桩供电模块以及机器人充电模块,所述充电桩供电模块包括充电器、充电管理模块以及设置在充电桩上的充电桩电极,所述充电管理模块包括电源模块,所述充电桩电极供机器人进行充电处理;
8.所述机器人充电模块包括机器人电池和充电控制模块,还包括用于与充电桩电极进行电连接的机器人电极,所述充电控制模块包括控制器和机器人电源模块,所述机器人电极用于连接充电桩电极给机器人电池充电,所述机器人电源模块用于提供稳定电源;
9.所述充电控制模块还包括控制机器人电池充放电的开关件,所述开关件一端连接机器人电极,另一端与机器人电池连接,所述充电控制模块还包括对机器人电极的电压进行采样处理的采样模块。
10.优选的,所述采样模块设置为光耦隔离器,所述光耦隔离器包括光耦隔离电路和采样电阻r10,所述光耦隔离电路和采样电阻r10用于采集机器人电极电压并输出信号给控制器。
11.优选的,所述开关件设置为开关继电器,所述开关继电器包括常开开关触点与开关线圈,所述常开开关触点一端连接机器人电极,另一端与机器人电池连接。
12.优选的,所述充电管理模块还包括连接在充电器与充电桩电极之间的充电桩开关组件,所述充电桩开关组件包括第一继电器和第二继电器。
13.优选的,所述充电管理模块还包括用于控制充电桩开关组件开关动作的检测组件,所述检测组件包括充电桩电压采样电路以及比较器电路,所述充电桩电压采样电路用于对充电桩电极上的电压进行采样并将采样信号传送给比较器电路;所述比较器电路还用于连接电源模块并采样电压给比较器电路,所述比较器电路用于控制第二继电器的工作状态。
14.优选的,所述充电管理模块还包括微动开关,所述微动开关用于控制第一继电器工作,所述微动开关设置在充电桩上用于机器人移动到指定位置时触发。
15.优选的,所述第一继电器包括两个第一常开触点以及第一线圈,所述第一线圈与微动开关连接,所述第一常开触点一端连接充电器另一端连接第二继电器。
16.优选的,所述充电管理模块还包括限流限压电路,所述限流限压电路包括电阻r1、电阻r2、电阻r3和电阻r4,所述电阻r1和电阻r2并联后一端连接电源,另一端连接第一继电器,所述电阻r3和电阻r4并联后一端接地另一端与电源连接。
17.本发明的有益效果:
18.1、通过充电桩供电模块与机器人充电模块的设置,在机器人需要充电时,自动寻找充电桩进行充电处理;并采用普通充电器和充电管理电路,将充电损坏的情况控制在功率回路,进而充电器损坏后,便于更换充电器,进而提高充电桩的通用性;
19.2、在充电桩和机器人上均设置有电压采样电路,相互检测控制充电回路,在机器人与充电桩相互适配后,才会导通充电回路,进而提高充电桩和机器人充电配对的可靠性,避免电极出现误触产生带电的危险。
20.3、充电桩供电模块的电路采用电阻、继电器、比较器等常规电子器件,降低整体成本,并且具有电路可靠,故障率低的特点。
附图说明
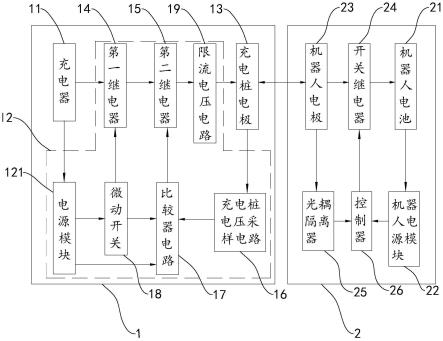
21.图1为本技术实施例的整体结构原理框图;
22.图2为本技术实施例的充电桩供电模块电路原理图;
23.图3为本技术实施例的机器人充电模块电路原理图;
24.图4为本技术实施例的机器人自动充电工作流程图。
25.其中,1、充电桩供电模块;11、充电器;12、充电管理模块;121、电源模块;13、充电桩电极;14、第一继电器;15、第二继电器;16、充电桩电压采样电路;17、比较器电路;18、微动开关;19、限流限压电路;2、机器人充电模块;21、机器人电池;22、机器人电源模块;23、机器人电极;24、开关继电器;25、光耦隔离器;26、控制器。
具体实施方式
26.为了加深对本发明的理解,下面将结合实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
27.实施例:
28.参考图1,为本技术公开的一种具有充电管理功能的机器人自动充电系统,包括充电桩供电模块1以及机器人充电模块2,将机器人充电模块2移动到充电桩供电模块1处,实现自动对机器人进行充电。充电桩供电模块1包括充电桩、充电器11、充电管理模块12以及
设置在充电桩上的充电桩电极13,充电管理模块12包括电源模块121,充电器11连接电源后,利用电源模块121给充电桩提供稳定电源。
29.参考图1和图2,充电管理模块12还包括充电桩开关组件以及检测组件,检测组件用于控制充电桩开关组件并检测充电桩电极13的电压,充电桩开关组件包括第一继电器14和第二继电器15。第一继电器14包括两个第一常开触点以及第一线圈,第一线圈与微动开关18连接,第一常开触点一端连接充电器11另一端连接第二继电器15。
30.检测组件包括充电桩电压采样电路16以及比较器电路17,充电桩电压采样电路16对充电桩电极13的电压进行采样,并将采样信号传送给比较器电路17。比较器电路17还连接着电源模块121,将电源模块121的采样电压与充电桩电压进行比较,比较器电路17u1采集充电桩电极13的电压值与参考电压值比较后输出到三极管q1,从而控制第二继电器15的线圈,充电桩电压采样电路16中设有电阻r8、电阻r9,电阻r8、电阻r9连接充电桩电极13和比较器电路17的正输入端。
31.参考图1和图2,充电管理模块12还包括微动开关18,微动开关18用于控制第一继电器14工作,将微动开关18设置在充电桩上,机器人移动充电桩上指定位置后将会触发充电信号。将微动开关18作为第一线圈的触发信号,当机器人需要充电移动到充电桩指定位置后会触发微动开关18闭合,同时两对电极相互接触。充电管理模块12还包括限流限压电路19,包括电阻r1、电阻r2、电阻r3和电阻r4,电阻r1和电阻r2并联后一端连接电源,另一端连接第一继电器14,电阻r3和电阻r4并联后一端接地另一端与电源连接。
32.此时第一继电器14动作,充电器11输入经过电阻r1、电阻r2、电阻r3和电阻r4后与充电桩电极13连通,为机器人检测充电桩电压提供20v、20ma左右的浮压信号。
33.参考图1和图3,机器人充电模块2包括对应充电桩电极13设置的机器人电极23,还包括通过导线连接机器人电极23的机器人电池21,机器人电极23与充电桩电极13连接后,开始对机器人电池21进行充电。机器人充电模块2还包括充电控制模块,充电控制模块包括控制器26和机器人电源模块22,机器人电极23用于连接充电桩电极13给机器人电池21充电,机器人电源模块22用于提供稳定电源。
34.充电控制模块还包括控制机器人电池21充放电的开关件,开关件一端连接机器人电极23,另一端与机器人电池21连接,充电控制模块还包括对机器人电极23的电压进行采样处理的采样模块。采样模块设置为光耦隔离器25,光耦隔离器25包括光耦隔离电路和采样电阻r10,光耦隔离电路和采样电阻r10用于采集机器人电极23电压并输出信号给控制器26。开关件设置为开关继电器24,开关继电器24包括常开开关触点与开关线圈,常开开关触点一端连接机器人电极23,另一端与机器人电池21连接。
35.参考图1至图4,当机器人需要充电时,自动移动到充电桩供电模块1指定位置,并在移动过程中触发微动开关18闭合,同时两对电极相互接触,此时第一继电器14k1动作,充电器11输入经过电阻r1至电阻r4后与充电桩电极13连通,为机器人检测充电桩电压提供20v、20ma的浮压信号。然后控制器26经光耦隔离器25检测到浮压信号后,将机器人电池21电压传递到充电桩电极13,此时充电桩电压采样电路16起作用触发比较器电路17输出高电平引起第二继电器15的触点闭合,实现了充电桩充电主回路导通而顺利充电。
36.当机器人电池21充满电,机器人控制器26与电池通信获取到满电信号后会控制机器人离开充电桩区域,同时充电桩微动开关18触发信号消失,充电主回路断开,电压采样信
号消失整个系统回到最初状态,并等待下一个机器人自动充电周期的到来。
37.上述实施例不应以任何方式限制本发明,凡采用等同替换或等效转换的方式获得的技术方案均落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1