一种移动靶车控制器的制作方法
1.本发明涉及靶车技术领域,具体涉及一种移动靶车控制器。
背景技术:
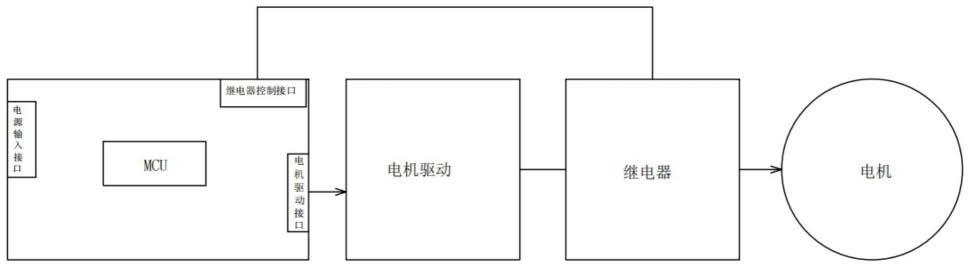
2.射击训练是每一个特警人员的必修课,在传统的军事射击训练中,一般都是采用射击标靶进行练习,而射击标靶底下通常为靶车,现有靶车控制器用于控制靶车前进和后退移动;现有靶车控制器通信连接图,如图1所示,主控控制主板连接电机驱动,控制电机得电使电机转动,需要换向时通过控制继电器进行换向。具体的原理,结合现有靶车控制器电路原理图图2进行阐述;靶车动作由mcu模块进行控制。其一状态,当k3吸合,k4不吸合时,电机正转;其二状态,当k3不吸合,k4吸合时,电机反转;其三状态,当k3和k4都不吸合时,电机不转;该移动靶车控制器集成度低、控制繁琐、故障率高、不易安装且功能单一,靶车比较不稳定。
3.鉴于此,本案发明人对上述问题进行深入研究,遂有本案产生。
技术实现要素:
4.本发明的目的在于提供一种移动靶车控制器,以解决背景技术中的问题。
5.为了达到上述目的,本发明采用这样的技术方案:
6.一种移动靶车控制器,包括控制器主体;所述控制器主体包括控制主板、集成于控制主板上的mcu模块、电机驱动以及电路模块;所述控制主板包括与三相电机相连接的电机接口。
7.所述电路模块包括nmos管q1、nmos管q2、nmos管q3、nmos管q4、nmos管q5、以及nmos管q6;
8.其中,nmos管q1的d极与dc端相连接,nmos管q1的g极与电机驱动相连接,nmos管q1的s极与三相电机的a相相连接;
9.nmos管q2的d极与三相电机的b相连接,nmos管q2的g极与电机驱动相连接,nmos管q2的s极与gnd端相连接;
10.nmos管q3的d极与dc端连接,nmos管q3的g极与电机驱动相连接,nmos管q3的s极与三相电机的b相相连接;
11.nmos管q4的d极与三相电机的c相相连接,nmos管q4的g极与电机驱动相连接,nmos管q4的s极与gnd端相连接;
12.nmos管q5的d极与三相电机的a相相连接,nmos管q5的g极与电机驱动相连接,nmos管q5的s极与gnd端相连接;
13.nmos管q6的d极与dc端相连接,nmos管q6的g极与电机驱动相连接,nmos管q6的s极与三相电机的c相相连接。
14.所述控制器主体还包括与控制主板可拆装连接的无线模块;所述控制主板包括用于连接无线模块的无线接口。
15.所述控制主板还包括用于连接精度靶板的报靶口。
16.所述控制主板还包括第一接近开关和第二接近开关;所述第一接近开关与第二接近开关并排设置。
17.所述第一接近开关包括第一状态指示灯;所述第二接近开关包括第二状态指示灯。
18.所述控制主板还包括用于连接电池的电池接口。
19.所述控制器主体还包括电池;所述电池通过电池接口与控制主板相连接。
20.采用上述技术方案后,一种移动靶车控制器,至少具有如下有益效果:
21.在实际实施过程中,将mcu模块、电机驱动以及电路模块集成与控制主板上,集成度高,故障率低,便于生产制造,易于安装;同时通过mcu模块和电路模块的配合实现换向;同时控制器节省了继电器。
附图说明
22.图1为现有技术中靶车控制器的通信连接结构示意图;
23.图2为现有技术中靶车控制器的电路连接结构示意图;
24.图3为根据本发明的控制器的通信连接结构示意图;
25.图4为根据本发明的控制器的电路连接结构示意图;
26.图中:
27.控制主板1;mcu模块11;电机驱动12;电路模块13;电机接口14;无线模块2;无线接口15;报靶口16;第一接近开关17;第二接近开关18;第一状态指示灯171;第二状态指示灯172;电池接口19;电池3。
具体实施方式
28.为了进一步解释本发明的技术方案,下面通过图1-4所示对具体实施例进行详细阐述。
29.一种移动靶车控制器,包括控制器主体;控制器主体包括控制主板1、集成于控制主板1上的mcu模块11、电机驱动12以及电路模块13;控制主板1包括与三相电机相连接的电机接口14。在实际实施过程中,将mcu模块11、电机驱动12以及电路模块13集成与控制主板1上,集成度高,故障率低,便于生产制造,易于安装;同时通过mcu模块11和电路模块13的配合实现换向;同时控制器节省了继电器。
30.可选地,电路模块13包括nmos管q1、nmos管q2、nmos管q3、nmos管q4、nmos管q5、以及nmos管q6;
31.其中,nmos管q1的d极与dc端相连接,nmos管q1的g极与电机驱动12相连接,nmos管q1的s极与三相电机的a相相连接;
32.nmos管q2的d极与三相电机的b相连接,nmos管q2的g极与电机驱动12相连接,nmos管q2的s极与gnd端相连接;
33.nmos管q3的d极与dc端连接,nmos管q3的g极与电机驱动12相连接,nmos管q3的s极与三相电机的b相相连接;
34.nmos管q4的d极与三相电机的c相相连接,nmos管q4的g极与电机驱动12相连接,
nmos管q4的s极与gnd端相连接;
35.nmos管q5的d极与三相电机的a相相连接,nmos管q5的g极与电机驱动12相连接,nmos管q5的s极与gnd端相连接;
36.nmos管q6的d极与dc端相连接,nmos管q6的g极与电机驱动12相连接,nmos管q6的s极与三相电机的c相相连接。
37.在实际实施过程中,通过mcu模块11控制nmos管的打开或关闭;若q1、q4打开,其他开关则电流由dc端经过q1、a相绕组、c相绕组、q4流回gnd端。流过a、c相定子绕组的电流会产生一个磁场,由右手定则可知其方向与b相绕组平行。由于转子是永磁体,在磁场力的作用下会想着于定子磁场平行的方向旋转;通过mcu模块11打开不同的nmos管,实现三相电机的换向,控制三相电机实现正反转。
38.可选地,控制器主体还包括与控制主板1可拆装连接的无线模块2;控制主板1包括用于连接无线模块2的无线接口15。在实际实施过程中,通过安装无线模块2,使得控制器主体可接收外界信号,便于使用者对靶车进行控制。
39.可选地,控制主板1还包括用于连接精度靶板的报靶口16。在实际实施过程中,通过报靶口16连接精度靶板,在击中精度靶板后,可进行语音报靶,其中,报靶用的扬声器可连接于精度靶板与报靶口16之间,也可设置于精度靶板上。
40.可选地,控制主板1还包括第一接近开关17和第二接近开关18;第一接近开关17与第二接近开关18并排设置。在实际实施过程中,靶车设置于轨道上,并沿轨道进行移动,通过第一接近开关17对轨道的一端进行感应,第二接近开关18对轨道的另一端进行感应,当接近开关感应到信号后,反馈信号给mcu模块11使得电机停转,避免靶车脱出轨道。
41.可选地,第一接近开关17包括第一状态指示灯171;第二接近开关18包括第二状态指示灯172。在实际实施过程中,通过状态指示灯对靶车的运动进行指示;当第一状态指示灯171亮起时,指示靶车正朝向轨道的一端进行移动;当第二状态指示灯172亮起时,指示靶车正朝向轨道的另一端进行移动,便于使用者掌握靶车的动向,从而便于使用者进行控制。
42.可选地,控制主板1还包括用于连接电池3的电池接口19。在实际实施过程中,通过设置电池接口19连接电池3,方便电池3的更换。
43.可选地,控制器主体还包括电池3;电池3通过电池接口19与控制主板1相连接。在实际实施过程中,通过独立电源对控制器主体进行供电,使得控制器运行更加稳定高效。
44.靶车控制器是用来控制靶车电机启动、运行、速度、停止的核心部件,是靶车的重要部件。靶车控制器系统的主要功能:
45.恒流控制技术,靶车控制器堵转电流和动态运行电流完全一致,保证电池3寿命,并提高电机的启动扭矩。
46.自检功能,控制器只要一上点,就会自动检测与之相关的结构状态,如接口短路等,一旦出现故障,控制器自动保护,充分保证靶车使用的安全,当故障排除后自动恢复。
47.堵转保护:自动判断电机在过流时是处于完全堵转状态还是运行状态或电机短路状态,如电机处于堵转状态,则控制器2秒后将限流值控制在10a以内,起到保护电机和电池3的作用。如电机处于短路状态,控制器则使输出电流控制在2a以下确保控制器以及电池3的安全。
48.本发明的产品形式并非限于本案图示和实施例,任何人对其进行类似思路的适当
变化或修饰,皆应视为不脱离本发明的专利范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1