一种利用PDM应对参数变化以实现WPT系统ZVS的方法
一种利用pdm应对参数变化以实现wpt系统zvs的方法
技术领域
1.本发明涉及无线电能传输技术领域,具体涉及一种利用pdm应对参数变化以实现wpt系统zvs的方法。
背景技术:
2.无线电力传输(wpt)作为一种很有前途的技术,已广泛应用于消费电子产品、人体医疗设备、工业机器人和电动汽车。ss拓扑的wpt系统由于其结构简单、效率高而被广泛使用。但耦合系数等参数的变化会影响系统的输出电压和zvs(零电压开通)的实现。传统的wpt系统通常使用额外的dc/dc转换器来维持额定输出电压,但这会增加系统的复杂性和成本。如果系统采用移相的方法,这将增加zvs的实现难度。
技术实现要素:
3.本发明的目的在于,提供一种利用pdm应对参数变化以实现wpt系统zvs的方法。本发明可以使wpt系统在参数变化时仍能实现zvs并达到额定功率,具有实现难度低,成本低的优点。
4.为解决上述技术问题,本发明提供的技术方案如下:一种利用pdm应对参数变化以实现wpt系统zvs的方法,包括如下步骤:
5.a、构建wpt系统的电路模型,对电路模型的副边参数进行效率优化,以确定副边参数中的电容c2和电感l2的关系;
6.b、根据电路模型的原边参数的输入阻抗,确定原边参数中电容c1与副边参数中的电容c2的关系;
7.c、采用pdm来调节wpt系统输出功率,确定输出功率随c1和c2变化的规律;
8.d、由输出功率确定wpt系统的原边参数,以实现wpt系统的zvs。
9.上述的利用pdm应对参数变化以实现wpt系统zvs的方法的方法,所述副边参数中的电容c2和电感l2的关系如下:
10.ωl2=1/ωc2;
11.式中:ω为wpt系统的工作频率。
12.前述的利用pdm应对参数变化以实现wpt系统zvs的方法的方法,所述原边参数中电容c1与副边参数中的电容c2的关系如下:
[0013][0014]
式中:ω为wpt系统的工作频率;l1为原边电感;t为为与功率因数相关的物理量;q1为原边线圈的品质因数;k为耦合系数;rs为副边电阻;r为等效电阻;x2=ωl
2-1/ωc2。
[0015]
前述的利用pdm应对参数变化以实现wpt系统zvs的方法的方法,在wpt系统的工作
频率ω下,电容c2的值为c
2r
时与副边电感l2发生共振,电容c2在c
2r-c
2δ
和c
2r
+c
2δ
之间变化,电容c1的值为c
1r
时与原边电感l1发生共振,电容c1在c
1r-c
1δ
和c
1r
+c
1δ
之间变化,c
1r-c
1δ
、c
1r
+c
1δ
、c
2r-c
2δ
和c
2r
+c
2δ
所围成的矩形为容c1和电容c2的变化范围,矩形左上角的点是整个矩形范围内最小的输出功率点;
[0016]
所述wpt系统输出功率表示如下:
[0017][0018]
式中:p
out
为输出功率;ω为wpt系统的工作频率,m为电感之间的互感;v
in
为输入电压;r为等效电阻;r
p
为原边电阻;rs为副边电阻;x1=ωl
1-1/ωc1;x2=ωl
2-1/ωc2;
[0019]
利用输出功率p
out
分别对c1和c2求偏导,得到输出功率随c1和c2变化的规律:
[0020][0021][0022]
对于矩形左上角的输出功率点输出功率下所示:
[0023][0024]
简化为:
[0025][0026]
式中:
[0027][0028]
p表示电容c1和电容c2允许变化的百分比;
[0029]
上式为关于k的函数,函数除以wpt系统额定功率的最小值得到wpt系统的原边参数中的电感l1,得到电感l1后根据公式计算电容c1,公式为:
[0030][0031]
与现有技术相比,本发明通过构建wpt系统的电路模型,对电路模型的副边参数进行效率优化,以确定副边参数中的电容c2和电感l2的关系;然后根据电路模型的原边参数的输入阻抗,确定原边参数中电容c1与副边参数中的电容c2的关系;再采用pdm来调节wpt系统输出功率,确定输出功率随c1和c2变化的规律;最后由输出功率确定wpt系统的原边参数,以实现wpt系统的zvs。本发明的通过设定了谐振电容和耦合系数对系统效率、功率和功率因数的影响关系,以此关系进行原边参数的设计,以此可以在三组参数同时变化时,wpt系统仍能实现zvs并达到额定功率,并且相比采用传统谐振设计方法具有实现难度低,成本低的优点。
附图说明
[0032]
图1为两线圈wpt系统的电路模型示意图;
[0033]
图2是t的示意图;
[0034]
图3为c1关于c2的曲线簇;
[0035]
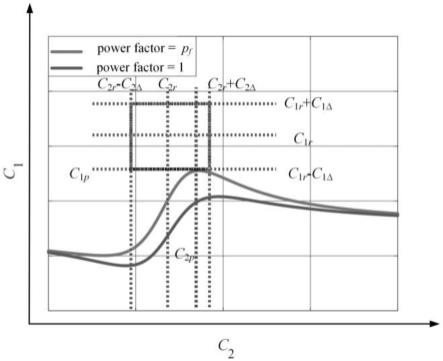
图4为c1和c2的波动范围矩阵示意图;
[0036]
图5是c1和c2的变化范围示意图;
[0037]
图6是c1随k变化的趋势图;
[0038]
图7是带有pdm和pi调制的无线输能示意图;
[0039]
图8为密度为0.7时的v1和ii的示意图;
[0040]
图9为对照组的zpa平面示意图;
[0041]
图10为实验测量数据示意图。
具体实施方式
[0042]
下面结合实施例和附图对本发明作进一步的说明,但并不作为对本发明限制的依据。
[0043]
实施例:一种利用pdm应对参数变化以实现wpt系统zvs的方法,包括如下步骤:
[0044]
a、构建wpt系统的电路模型,对电路模型的副边参数进行效率优化,以确定副边参数中的电容c2和电感l2的关系;如图1所示为具有ss拓扑的双线圈wpt系统(简称系统)的电路模型,其中磁芯、屏蔽层、逆变器和整流桥的损耗可以忽略不计,系统的效率方程为
[0045][0046]
式中:η为wpt系统的效率;ω为wpt系统的工作频率;m为电感之间的互感;r为等效电阻;r
p
为原边电阻;rs为副边电阻(rs由l2的交流寄生电阻和c2的串联等效电阻组成);l2为副边电感;c2为副边电容;(本实施例中会直接以参数符号以及公式代号进行说明)
[0047]
两个线圈的电感对wpt系统效率有影响,如(1)所示。为了使系统尽可能高效,应优化线圈匝数:
[0048][0049]
式(2)中,n1代表初级线圈的匝数,n2代表次级线圈的匝数,l
10
和l
20
分别代表ansys软件仿真中单匝原边线圈和副边线圈的自感值。
[0050]
将(2)替换为(1):
[0051][0052]
(3)中的q1和q2是线圈及其谐振电容的品质因数。这表明系统的效率不受l1和c1的影响。如果(3)对n2的偏导数为0,则可以找到最优的n2,从而获得最高的系统效率。将(3)中的c2代入n2,再对n2求偏导,令偏导结果等于0,即得到系统效率最高的n2表达式,如(4)所示:
[0053][0054]
式(5)表示系统最高效率时n2的表达:
[0055][0056]
另一方面,l
20
可以通过模拟获得,l2可以从(2)中获得,如式(6)所示:
[0057][0058]
同时,式(4)可用于计算c2的值。c2的表达式如(7)所示:
[0059][0060]
根据(6)和(7)可知,l2和c2在工作频率下谐振,即ωl2=1/ωc2,是系统获得最佳效率的必要条件。
[0061]
b、根据电路模型的原边参数的输入阻抗,确定原边参数中电容c1与副边参数中的电容c2的关系;在步骤a中确定了c2值后,为使系统的输入阻抗角在c1和c2漂移之后尽可能小,需要考虑输入阻抗z
in
,如(8)所示:
[0062][0063]
在(8)中,xi=ωl
i-1/ωci(i=1或2)。z
in
的虚部与实部之比为t,如图2所示;,其表达式为(9):
[0064][0065]
同时,t也为与功率因数相关的物理量,根据其物理意义,也可用式(10)表示,其中pf表示功率因数:
[0066][0067]
式(9)可以用于确定c1和c2之间的关系,如(11)所示:
[0068][0069]
式中:ω为wpt系统的工作频率;l1为原边电感;t为与功率因数相关的物理量;q1为
原边线圈的品质因数;k为耦合系数;rs为副边电阻;r为等效电阻;x2=ωl
2-1/ωc2。
[0070]
当参数l1、l2、k和r确定时,如图3所示,c1关于c2的曲线通常在一条水平渐近线处先减小后增大,然后再减小并收敛到另一个水平渐近线。
[0071]
c、采用pdm来调节wpt系统输出功率,确定输出功率随c1和c2变化的规律;本发明采用pdm(脉冲密度调制(pulse density modulation),简称pdm,是一种使用二进制数0,1表示模拟信号的调制方式)来调节功率,功率在密度为1时最大。为保证无论c1和c2在给定范围内如何变化,系统的输出功率都高于额定功率,需要阐明系统输出功率随c1和c2变化的规律。找到l2和c2的过程已在前文部分中确定,因此可以认为这两个参数在后期是已知的。当输入电压、输出电压和输出功率给定时,负载电阻是已知的。通过仿真可以确定耦合系数的变化范围。wpt系统的输入阻抗在功率因数小于1时呈阻感性。因此,c1和c2的波动范围应在功率因数为1的曲线上方,如图4所示,以确保系统实现zvs。
[0072]
在图4中,在wpt系统的工作频率ω下,电容c2的值为c
2r
时与副边电感l2发生共振,电容c2在c
2r-c
2δ
和c
2r
+c
2δ
之间变化;电容c1的值为c
1r
时与原边电感l1发生共振,电容c1在c
1r-c
1δ
和c
1r
+c
1δ
之间变化,图4中c
1r-c
1δ
、c
1r
+c
1δ
、c
2r-c
2δ
和c
2r
+c
2δ
所围成的矩形为容c1和电容c2的变化范围。需要注意的是,c
1r
在工作频率下与l1谐振。同时,c
2δ
=p
·c2r
,c
1δ
=p
·c1r
,其中p表示c1和c2允许变化的百分比。
[0073]
所述wpt系统输出功率表示如下:
[0074][0075]
式中:p
out
为输出功率;ω为wpt系统的工作频率,m为电感之间的互感;v
in
为输入电压;r为等效电阻;r
p
为原边电阻;rs为副边电阻;x1=ωl
1-1/ωc1;x2=ωl
2-1/ωc2;
[0076]
利用输出功率p
out
分别对c1和c2求偏导,得到输出功率随c1和c2变化的规律:
[0077][0078][0079]
对矩形中的每个点都有x1>0,因为它位于功率因数为1的曲线上方。在c2=c
2r
处恰好有x2=0。因此,对矩形左半边的每个点都有x2<0。因此,在矩形的左半边有(15)存在。
[0080][0081]
显然,左上角的一点是矩形左半边功率最小的一点。令p
out
关于c2的偏导结果为0,则有:
[0082][0083]
(15)和(16)表明随着c2的增加,p
out
先增大后减小。(12)包含x2,因此,可以认为(12)是关于c2的表达式。令(12)等于某一常数,则方程有两个根c
21
和c
22
,如图5所示。同时,c
21
和c
22
满足(17)。
[0084][0085]
同时在c
2r
左右对称有(18):
[0086][0087]
假设c
21
≤c
22
且c
21
=c
2r-c
2δ
,则有(19):
[0088][0089]
(19)表明c
22
>c
2r
+c
2δ
。由于功率在[c
21
,c
22
]的区间内先增大后减小同时c
21
和c
22
处的p
out
相等。并且c
2r
+c
2δ
处的p
out
比c
21
处的更大。在与c
2r
相同距离的情况下,右侧的功率高于左侧的功率。因此,矩形左上角点的功率是整个矩形范围内最小的。
[0090]
d、由输出功率确定wpt系统的原边参数,以实现wpt系统的zvs。具体的,从式(11)得到式(20):
[0091][0092]
上式(20)表明(1-p)c
1r
在其他参数一定时与l1成反比。设存在a,如(21)所示:
[0093][0094]
对于矩形左上角的点,由(21)以及x1的定义可知x1=(ω-a/ω)
·
l1;那么,对于矩形左上角的一点,功率如(22)所示,且简化为(23)。
[0095][0096][0097]
式(23)中的a、b、d、e、g等符号的含义如(24)所示:
[0098][0099]
上式为关于k的函数,函数除以wpt系统额定功率的最小值得到wpt系统的原边参数中的电感l1,得到电感l1代入式(20)即可计算电容c1。
[0100]
其中,式(24)中a的表达式用k
max
代替了k,其原因在于式(11)中包括了x2,x2包括了c2,所以(11)可以认为是c1对c2的表达式。令c1关于c2的偏导结果为0,则可以得到曲线峰值处c2的表达式,即c
2p
,如式(25)和图4所示:
[0101][0102]
为了判断c
2p
还是c
2r
哪个更大,令显然a>q2r+l2ω。c
2p
和c
2r
的表达式的分母都是正数。因此,对于c
2p-c2r,将c
2p
的分子乘以c
2r
的分母,再减去c
2p
的分母与c
2r
的分子的乘积,得式(26):
[0103][0104]
从式(10)可以看出t≤1,这表明(26)大于0且c
2p
>c
2r
,因此可得式(27):
[0105][0106]
同时,联立(20)和(21)得到式(28):
[0107][0108]
式(28)表明a>0。
[0109]
根据式(27)和(28),结合(21)可知,k越大,a越小,c
1r
越大。式(24)中中的k
max
使得在k=k
min
处由c1和c2变化形成的矩形可能保持在对应于t=1的曲线之上,如图6所示,随着耦合系数减小,对应的功率因数为1的曲线也随之下降,这确保系统始终能够实现zvs。
[0110]
为了验证本发明的有益效果,按照图7中的原理图构建实验平台,图7中,逆变器将直流电压v
in
转换为v1,通过电流i1将能量从原边线圈传递到副边线圈,再通过整流器将v2转换为直流输出电压。图8显示了密度为0.7时的v1和i1。当mosfet中的s1和s3导通时,v1为p,即大于0。s2和s4导通时,v1为n,即小于0。s1和s2导通时,v1为0。p和n的个数之和与p、n、0的总数之比即为密度。实验平台中分压电路对系统输出电压进行采样和分压,然后将实际电压与额定电压进行比较,并对密度进行pi调制,使电路输出额定电压。实验平台中的pi和pdm调制在stm32控制器中实现。
[0111]
根据本发明的方法,设计了一个额定功率为3.3kw,输入电压和输出电压为400v的样机。为了比较效果,还根据ωl1=1/(ωc1),ωl2=1/(ωc2)的原则同意设计了一个额定功率为3.3kw,输入电压和输出电压为400v的对照组系统。两个系统的参数如表1所示:
[0112]
参数实验组对照组l175.5μh332μhl2585.76μh304.7μhc159.356nf10.561nfc25.982nf11.506nfq1370422q2363418kmin0.1270.128kmax0.2060.232f85khz85khzr
l
48.485ω48.485ω
[0113]
表1
[0114]
实验中,c1、c2、k三个参数的变化范围分别为[0.95c
1r
,1.05c
1r
],[0.95c
2r
,1.05c
2r
]和[k
min
,k
max
]。三个参数变化的区域可以看作是一个三维空间,其中zvs可以在zpa表面上方的区域中实现,对照组系统的zpa表面如图9所示。相比之下,整个实验组的变化空间在zpa表面之上。
[0115]
从图9可以看出,当参数发生变化时,参考系统并不总是能实现zvs。在图10中红点处的参数进行实验。括号中的是红点处所测得的密度,v1超前i1的角度以及输出功率。图10(c)和(d)中的两条蓝色曲线的功率因数为1,在两条曲线上方可以实现zvs。密度小于1的点处可以达到额定功率。
[0116]
由图10知,在a、b两点处,对照组处于谐振状态。对照组在k
max
时的功率均未达到额定功率。对于实验组,各点处均实现zvs,只有在c点的功率没有达到额定功率。由于参数按照3.3kw额定功率进行,考虑到损耗,c点处功率是合理的。
[0117]
综上所述,本发明分析了谐振电容和耦合系数对系统效率、功率和功率因数的影响。通过本发明的方法,当三组参数同时变化时,实验组的wpt系统在大部分区域仍能实现zvs并达到额定功率。实验结果表明,本发明提出的设计方法能够达到预期目标。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1