用于无轴承电机调制磁极结构设计的特定次谐波消除方法与流程
1.本发明属于电机优化设计领域的一种电机控制处理方法,特别提供了一种用于无轴承电机调制磁极结构设计的特定次谐波消除方法。
背景技术:
2.无轴承永磁同步电机在电机在定子槽嵌套有两套绕组,一套转矩绕组,提供转矩;另一套是悬浮力绕组,提供悬浮力,当悬浮力绕组通入合适的电流时,电机气隙磁场分布将含有偏置分量,从而产生使转子悬浮的悬浮力,克服了机械轴承引起的轴承磨损问题,且无需润滑装置,在真空与超洁净特殊应用场合得到了广泛应用。
3.无轴承电机的气隙磁场复杂,且定、转子磁动势谐波的存在将会导致电机的转矩与悬浮力波动,使得电机产生振动和噪声、影响电机运行平稳性。由于无轴承永磁同步电机转子磁动势和定子磁动势会相互作用产生谐波,所以分析定转子间磁动势的相互作用并消除产生转矩与悬浮力与波动的磁动势谐波进行转矩与悬浮力波动的降低,对于提升电机运行平稳性就变得尤为重要。
4.永磁磁场中的谐波分量与定子绕组磁场的谐波分量相互作用不仅会产生转矩波动,还会产生使转子悬浮不稳定的悬浮力波动,同时齿槽转矩的存在也将加剧电机的转矩波动。转矩波动与悬浮力波动的存在将使无轴承电机产生振动与噪声,使电机无法平稳运行,因此,降低无轴承电机的转矩波动与悬浮力波动十分重要。
5.磁极调制技术能够对转子磁动势进行调制,改善转子磁场分布,将表贴式永磁电机的表面切割出槽,使永磁体表面变成正弦脉宽调制形状,随着载波比的增加,有效降低了反电势谐波,提高了永磁体利用率。虽然该结构对转矩由一定的优化效果,但优化效果并不明显,而且该结构由于永磁体用量降低,导致了转矩密度下降。所以将特定谐波消除法应用在了无轴承电机调制磁极结构的设计上,基于特定次谐波消除法设计的磁极结构能够有效消除特定次转子磁动势谐波,并有效降低对应阶次的转矩与悬浮力波动量,提升了电机运行的平稳性。
技术实现要素:
6.为了解决背景技术中存在的问题,本发明的目的在于提供一种用于无轴承电机调制磁极结构设计的特定次谐波消除方法,通过对径向充磁的调制磁极的转子磁动势的方波波形进行傅里叶分解得出各次谐波幅值的表达式,求解关于调制磁极的各个最优机械角度的非线性方程组,从而达到消除各次谐波的目的。
7.本发明技术方案如下:
8.s1:根据所设计的无轴承电机的基本参数确定电机的转子磁极的极对数p,根据所设计的无轴承电机需要消除的转子磁动势特定次谐波次数n,确定所需要消除的转子磁动势的特定次谐波个数n-1,进而确定一个完整的转子磁极的分块数为n;一个完整的转子磁极分为n个子块,每个子块作为一个调制磁极;
9.s2:根据特定次谐波消除方法,对转子极对数p、特定次谐波次数n、所需要消除的特定次谐波个数n-1、一个完整的转子磁极的分块数为n的无轴承电机建立调制磁极的径向磁化强度的各次谐波幅值的表达式;
10.s3:根据调制磁极的径向磁化强度的各次谐波幅值的表达式求解获得调制磁极的角度值分布;
11.s4:根据求解得到的调制磁极的角度值分布制造无轴承电机,达到消除特定次谐波的目的。
12.具体实施中,还根据求解得到的调制磁极的角度值分布建立调制磁极结构的无轴承电机的仿真模型,与原始的一个完整的转子磁极结构(整块磁极结构)的无轴承电机仿真模型进行对比仿真验证,仅判断验证是否达到消除特定次谐波的目的。
13.所述的特定次谐波为奇数次的谐波次数,n=1,3,5
…
。
14.所述的无轴承电机的转子磁极结构为表贴式磁极结构,本发明是将表贴式磁极结构无轴承电机的一个完整的转子磁极分为n块形成调制磁极结构。
15.本发明是通过对径向充磁的调制磁极的径向磁化强度的方波波形进行傅里叶分解得出径向磁化强度各次谐波幅值的表达式,建立关于各个开关角度的非线性方程组,再利用非线性方程组迭代求解获得调制磁极的机械角度,从而达到消除各次谐波的目的。
16.方法先求出一个转子磁极分为n块后调制磁极结构的机械角度,在最后其他几个块的调制磁极通过旋转复制得到,各个调制磁极是旋转对称的。
17.所述的步骤s2包括以下步骤:
18.s21:将径向充磁的调制磁极的转子磁动势由径向磁化强度表示,将各径向充磁的调制磁极产生的转子磁动势波形视为一系列方波波形进而进行傅里叶分解,得到调制磁极的径向磁化强度的各次谐波幅值的表达式:
[0019][0020]
式中,n为特定次谐波次数,n为一个完整的转子磁极的分块数,m为方波幅值,p为电机的转子极对数,α
nseg
为调制磁极的第n
seg
个机械角度,m
rk
分别为调制磁极的径向磁化强度的第k次谐波幅值,n
seg
表示调制磁极的第(1,2,3
…
n)个机械角度。
[0021]
所述步骤s3包括以下步骤:
[0022]
s31:根据调制磁极的径向磁化强度的各次谐波幅值的表达式,对除去基波(n=1)以外的需要消除的特定次谐波次数的磁化强度的特定次谐波幅值的表达式设置为0,保持一个完整的转子磁极的基波幅值与调制磁极结构的基波幅值一致,消除磁化强度的特定次谐波即可消除转子磁动势的对应次谐波。需要消除的特定次谐波次数n=3,5,7
…
,即将n=3,5,7
…
时的调制磁极的径向磁化强度的各次谐波幅值的表达式设置为0,进而建立以下非线性方程组:
[0023]
[0024]
本发明保持一个完整的转子磁极的基波幅值与调制磁极结构的基波幅值一致,使各次谐波系数为0即可建立非线性方程组,该非线性方程组是一复杂的非线性超越方程,求解非线性方程组得到调制磁极的机械角度能够消除特定次谐波。
[0025]
s32:随机选取调制磁极的第2到第n个机械角度α2~αn;
[0026]
s33:根据当前调制磁极的第2到第n个机械角度α2~αn对调制磁极在一个转子磁极下的初始的机械角度α1~αn进行筛选:
[0027]
将当前调制磁极的第2到第n个机械角度α2~αn代入步骤s31的非线性方程组求解出对应的第一个调制磁极的机械角度α1,并且将第2到第n个调制磁极的机械角度α2~αn代入非线性方程组m
rk
中,同时建立以下目标函数:
[0028]mrk
→0[0029]
其中,
→
0表示接近于0;
[0030]
然后对目标函数进行求解,不断缩小需要消除的径向磁化强度的各次谐波幅值使接近于0,直到筛选获得优化后的调制磁极的第1到第n个机械角度α1~αn;
[0031]
s34:将步骤s33筛选出的第1到第n个调制磁极的机械角度α1~αn再带入步骤s31建立的非线性方程组中,将m
rk
设置为0,采用牛顿迭代法对该非线性方程组进行迭代求解,得到最优的调制磁极结构的机械角度分布,最优的调制磁极结构的机械角度分布包括了最优的调制磁极的第1到第n个机械角度α1~αn;
[0032]
s35:步骤s34所求出的最优的调制磁极结构的机械角度分布为一个转子磁极下前1/4周期的机械角度,根据前1/4周期的机械角度对称计算出后1/4周期的机械角度,从而获得了一个转子磁极下的调制磁极结构的机械角度分布。
[0033]
在一个转子磁极下的调制磁极结构所占的机械角度为π/p,前1/4周期角度与后1/4周期内机械角度关于π/2p机械角度对称,进而根据前1/4周期的机械角度对称计算出后1/4周期的机械角度。
[0034]
所述步骤s32中,所述的初始机械角度分布按照以下方式获得:
[0035]
对于调制磁极的第2至n个初始的机械角度α2~αn,选取10000组区间(0,1)之间的n-1个随机数,n-1个随机数递增排序后作为调制磁极的第2至n个机械角度的系数c
nseg
,进而按照以下公式获得调制磁极第2至n个的机械角度:
[0036][0037]
其中,表示第n
seg
个机械角度的系数,表示调制磁极的第n
seg
个机械角度;
[0038]
对于调制磁极的第一个初始的机械角度α1,通过对步骤s31建立的第一个方程分离求解获得:
[0039][0040]
其中,调制比m取1,α1表示调制磁极的第一个初始机械角度,arccos这是反余弦函数,n表示一个转子磁极的分块数,n
seg
表示调制磁极机械角度的下标,用于区分第几个机械角度,n
seg
只取2,3
…
n,表示调制磁极的第n
seg
个机械角度。
[0041]
调制磁极在一个转子磁极下的机械角度满足递增排序关系:
[0042][0043]
本发明是将一个完整的转子磁极分为n块形成调制磁极结构,主要是通过建立调制磁极的径向磁化强度的各次谐波幅值的表达式,保持一个完整的转子磁极的基波幅值与调制磁极结构的基波幅值一致,使特定次谐波系数为0建立非线性方程组,经过牛顿迭代求解出调制磁极的各个最优机械角度并建立电机模型进行仿真分析,采用特定次谐波消除法设计的调制磁极结构能够消除转子磁动势中的特定次谐波。
[0044]
本发明的有益效果是:
[0045]
本发明对无轴承电机会引起转矩和悬浮力波动的转子磁动势的谐波进行消除来降低转矩和悬浮力波动。
[0046]
应用本发明方法所设计的无轴承电机可以同时降低无轴承永磁同步电机的转矩与悬浮力波动,提高电机运行的平稳性。
附图说明
[0047]
下面结合附图和具体实施方式对本发明进行进一步详细的说明:
[0048]
图1是调制磁极结构示意图;
[0049]
图2是调制磁极结构的的无轴承电机仿真模型示意图;
[0050]
图3一个完整的转子磁极结构的无轴承电机仿真模型示意图;
[0051]
图4是径向磁化强度各次谐波幅值对比图;
[0052]
图5是转矩波形对比图及转矩波动分布对比图;
[0053]
图6是悬浮力波形对比图及悬浮力波动分布对比图。
具体实施方式
[0054]
下面结合附图和具体实施对本发明作进一步说明。
[0055]
本发明的实施例具体实施情况如下:
[0056]
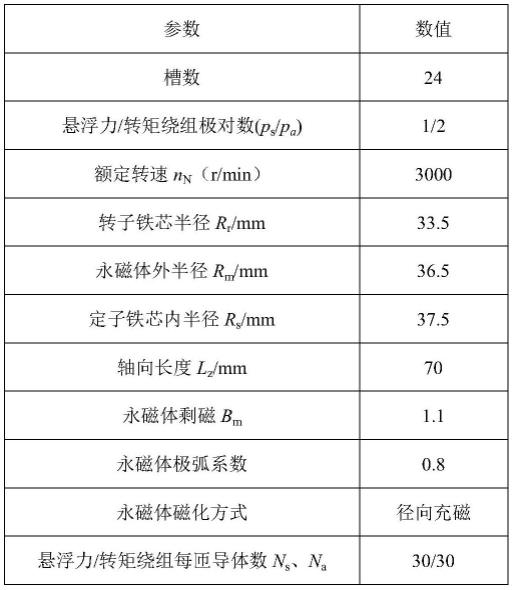
下面以一台24槽,转矩绕组与悬浮绕组极对数分别为pa=2,ps=1的电机为例,对本发明的实施方式详细说明,电机的参数如表1所示。
[0057]
表1无轴承永磁同步电机参数
[0058][0059][0060]
(1)根据表1的无轴承电机的基本参数确定电机的转子极对数为p=2;该电机需要消除的转子磁动势的特定次谐波次数为n=3、5、11、13、23、25,所以需要消除的转子磁动势的特定次谐波个数为n-1=6,则一极下的永磁体分块数n=7,一个转子磁极下调制磁极的分布如图1所示。
[0061]
(2)对转子极对数为p=2,需要消除的特定次谐波次数n=3、5、11、13、23、25,所需要消除的特定次谐波个数为n-1=6,一个完整的转子磁极的分块数为n=7的无轴承电机建立调制磁极的径向磁化强度的各次谐波幅值的表达式。对径向充磁的调制磁极的径向磁化强度的方波波形进行傅里叶分解,调制磁极的径向磁化强度的各次谐波幅值的表达式:
[0062][0063]
(3)根据径向磁化强度的各次谐波幅值的表达式(1),求解调制磁极的最优机械角度。
[0064]
根据调制磁极的径向磁化强度的各次谐波幅值的表达式,除去基波(n=1),将需要消除的n=3、5、11、13、23、25次谐波幅值的表达式m
r6
,m
r10
,m
r22
,m
r26
,m
r46
,m
r50
设置为0。保持一个完整的转子磁极的基波幅值与调制磁极结构的基波幅值m
r1
一致,使各次谐波系数为0建立以下非线性方程组:
[0065]
[0066]
对于调制磁极的第2至7个初始的机械角度α2~α7,随机选取10000组区间(0,1)之间的6个随机数,6个随机数递增排序后作为调制磁极的第2至7个机械角度的系数c
nseg
,则调制磁极第2至7个的机械角度可以由以下公式求出:
[0067][0068]
其中,表示第n
seg
(2,3
…
7)个机械角度的系数,表示调制磁极的第n
seg
(2,3
…
7)个机械角度,n
seg
表示调制磁极机械角度的下标,用于区分第几个角度,公式(5)中n
seg
只取2,3
…
7。
[0069]
对公式(2)中第一个方程进行分离求解调制磁极的第一个初始的机械角度α1,第一个机械角度值α1如公式(4)所示
[0070][0071]
其中,调制比m取1,α1表示调制磁极的第一个初始机械角度,n表示一个转子磁极的分块数,n
seg
表示调制磁极机械角度的下标,用于区分第几个角度,表示调制磁极的第n
seg
个机械角度。
[0072]
将调制磁极的第2至7个初始的机械角度α2~α7带入公式(3)中,可以求解得到相对应的α1。
[0073]
将公式(3)求得的10000组α2~α7分别代入非线性方程组m
r6
,m
r10
,m
r22
,m
r26
,m
r46
,m
r50
中,令:
[0074][0075]
其中,
→
0表示接近于0;
[0076]
不断缩小m
r6
,m
r10
,m
r22
,m
r26
,m
r46
,m
r50
的值使其更接近于0,直到筛选出一组调制磁极的初始机械角度α1~α7,正如表2所示。
[0077]
在调制磁极结构机械角度的整个求解过程中都要满足以下约束条件:
[0078]
调制磁极在一个转子磁极下的机械角度α1~α7满足递增排序关系:
[0079]
α1<α2<
…
<α7ꢀꢀꢀ
(6)
[0080]
表2选取初始机械角度值
[0081][0082]
将表(2)中的一组调制磁极结构初始机械角度α1~α7代入(2)中建立非线性方程组(5),令m
r6
,m
r10
,m
r22
,m
r26
,m
r46
,m
r50
都为0,采用牛顿迭代法(matlab中fsolve函数)对非线性方程组(5)进行求解,当程序收敛时,即可迭代得出最优的调制磁极结构的机械角度分布α1~α7,正如表3所示。
[0083][0084]
其中,α1~α7表示一组调制磁极结构初始机械角度,m
r6
,m
r10
,m
r22
,m
r26
,m
r46
,m
r50
表示需要消除的转子磁动势的特定次谐波次数为n=3、5、11、13、23、25的谐波幅值。
[0085]
表3最优机械角度值
[0086]
[0087]
迭代求解所得到的最优的调制磁极结构的机械角度分布为一个转子磁极下前1/4周期的机械角度,在一极下的永磁体所占的机械角度为π/2,前1/4周期角度与后1/4周期内开关角度关于π/4机械角度对称,由此可以对称计算出一极下后1/4周期角度,从而获得了一个转子磁极下的调制磁极结构的机械角度分布,正如表3所示。
[0088]
根据表3,建立调制磁极结构的的无轴承电机仿真模型(如图2所示)与原始的一个完整的转子磁极结构(整块磁极结构)的无轴承电机仿真模型(如图3所示)进行对比仿真验证。如图4所示,调制磁极结构的的无轴承电机转子磁动势的3、11、13、23等次谐波都得到有效除。同时7、9次谐波有所降低。转子磁动势的5、25次谐波相较于整块结构略有升高,但可以忽略不计。如图5所示,整块磁极结构的平均转矩为5.172nm,转矩波动为16.49%,进行特定次谐波消除后,调制磁极结构的的无轴承电机的平均转矩为5.15nm,转矩波动下降至7.93%,转矩波动相较于原始结构降低了51.91%。如图6所示,整块磁极结构的平均悬浮力为306.91n,悬浮力波动为2.74%,经过特定次谐波消除后,调制磁极结构的的无轴承电机的平均悬浮力为304.15n,悬浮力波动为1.01%,相对于整块磁极结构,悬浮力波动降低了63.14%。经过验证,用于无轴承电机调制磁极结构设计的特定次谐波消除方法能够有效消除特定次转子磁动势谐波并降低转矩与悬浮力波动,提升电机运行的平稳性。
[0089]
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1