双边长定子分段并联供电异步直线电机驱动结构和供电方法
1.本发明涉及高速、大推力及运行稳定的电磁弹射技术领域,特别涉及一种双边长定子分段并联供电异步直线电机驱动结构和供电方法。
背景技术:
2.随着超大功率脉冲技术和电子技术的飞速发展,电磁弹射装置在70年代开始有了重大突破,虽然在全世界范围内还处于试验研究和初步应用阶段,但是其潜在的应用前景受到极大关注。电磁弹射是一种新兴的直线推进技术,适用于高速、大推力和运行稳定的应用场景,其原理是通过电磁能量实现被弹射物体的快速运动。
3.目前用于驱动电磁弹射装置的直线电机有双边永磁同步直线电机、双边磁通切换直线电机、双边异步直线电机等。双边永磁同步直线电机的能量转换效率高,但是动子上的永磁体增加了运动部件的自身重量,且定子与动子之间的法向磁拉力很大并使动子运行不稳定,同时永磁体还存在一定的退磁风险;双边磁通切换直线电机在效率和推力密度方面都较高,但动子的质量大,不利于获得较大的运行加速度;双边异步直线电机的动子结构简单且重量轻,动子与定子间没有法向磁拉力,动子运行稳定,控制容易实现。
4.在双边异步直线电机中,电机绕组的供电方式有串联供电和并联供电;串联供电是将每一个定子段串起来后接在变流器电源上,其优点是每个定子段的电流相同,连线很少,但缺点是变流器的输出电压很高,容量要求特别大;并联供电是将每一个定子段先并联后再接在变流器电源上,其优点是变流器输出电压低,非动子覆盖的定子段绕组电流小,铜耗也少,变流器的输出电流不高,但缺点是并联连线较多。在行程很短的应用场所,为了减少线缆成本,大多采用串联供电,但是这种供电方式会大大的减小系统的运行效率;而并联供电通过减小非动子覆盖的定子段电流和铜耗,提高了系统能量转换效率。
5.在双边异步直线电机中,绕组结构形状有很多种,但为了好固定,大多数采用“l”型,并在“l”字的尾端固定。对于一些需要大推力的应用场合,动子滑块及其固定部件的位置越靠近动子重心越好,但“l”型绕组与动子之间没有多余的空间去安装滑块及其固定部件,“l”型绕组结构不宜采用。
6.直线电机可以分为同步直线电机和异步直线电机两大类,因此控制方式也有同步控制和异步控制之分。同步驱动模式需要精确检测动子的实时位置,也需要严格控制定子与动子同步;而异步驱动模式虽然也需要知道动子的位置信息,但是控制重点是保证滑差频率在给定的推力应用点,不需要控制定、动子同步。
技术实现要素:
7.本发明针对现有技术的缺陷,提供了一种双边长定子分段并联供电异步直线电机驱动结构和供电方法。
8.为了实现以上发明目的,本发明采取的技术方案如下:
9.一种双边长定子分段并联供电异步直线电机驱动结构,包括:双边长定子、多相绕
组、动子感应板、机械气隙、多相变流器和母线。
10.双边长定子中间设置动子感应板,双边长定子与动子感应板之间有一个机械气隙的距离,多相绕组由多个单相绕组组成,每一相绕组按照通电规律绕制在双边长定子铁芯上,多相变流器由多个单相变流器组成,每个变流器控制一单相绕组;
11.采用双边长定子异步直线电机作为电磁弹射的直线驱动机构,通过对双边长定子在同一位置或双边错开二分之一分段长度的位置进行等长度分段,分段长度为异步直线电机一对极距的整数倍,且小于动子感应板长度,动子感应板长度同样为一对极距的整数倍,使得动子感应板所在分段的多相绕组具有大的负载电流,而非动子感应板所在分段的多相绕组具有小的空载电流;双边长定子分段后再将全部分段多相绕组通过母线并联接到多相变流器的输出端,通过控制多相变流器输出电压和电机滑差频率实现对驱动力的控制;
12.异步直线电机采用多相绕组结构,可减小谐波阻力和驱动力脉动,降低单相变流器容量,增加总驱动力,满足直线电磁弹射时稳定的大推力要求;同侧同相的每一段定子绕组全部通过母线并联后由独立的单相变流器供电,可减小单台供电变流器的容量和并联母线的电流;异步直线电机动子感应板采用非磁性铝板,结构简单,重量轻,在负载重量较轻的情况下可减小异步直线电机结构尺寸和变流器的容量;动子感应板与双边长定子铁芯间的法向力为自动对中的排斥力,有利于异步直线电机的稳定运行;
13.电机采用异步控制,对位置检测精度要求低,控制策略简单并易于实现;本方案可满足电磁弹射的超高速、大推力、快加速和运行稳定等需求。
14.进一步地,异步直线电机的多相绕组为分段并联结构,分段长度为一对极距的整数倍,最小分段长度为一个极距;动子感应板长度为一对极距的整数倍,并远远大于定子的分段长度,是分段长度的整数倍;定子分段长度越小,动子越长,推力波动就越小;分段较长的两侧电机定子错开二分之一分段长度安装可进一步减小推力波动。
15.进一步地,单侧各相独立的单相变流器安装在所供电长定子的中间位置,通过母线往左和往右向长定子进行并联分段供电,这样可以减小母线电流,从而减小母线截面积;通过在母线中间位置多层分叉的连接方式,可大大减小靠近长定子的母线电流和母线截面积。
16.进一步地,双边长定子异步直线电机采用多相绕组,能够减小谐波阻力和驱动力脉动,降低单相变流器容量,增大总驱动力;多相绕组采用同心绕制和扇形结构安装有利于留出靠近动子感应板重心的位置空间,使得动子滑块及其固定部件能在靠近动子感应板重心的位置安装,减小动子受到的抬头或点头力矩,从而增加动子感应板运行的稳定性。
17.本发明还公开了一种双边长定子分段并联供电异步直线电机驱动的供电方法,包括:
18.为降低变流器的输出电压,直线电机采用分段并联供电;双电源模式下的并联方式为双侧长定子各自分段并联后由各侧变流器电源供电;单电源模式下的并联方式有两种,一种是双侧长定子段各自并联到同侧的母线后再将两侧母线并联由同一电源供电;另一种是同一位置的两侧的长定子段根据行波磁场相同原则进行串联然后再与其他位置处的定子段并联,最后由同一电源供电。
19.进一步地,在双边长定子异步直线电机中给双边长定子通入相同的对称正弦电流,在双边定子间产生行波磁场,行波磁场在动子感应板中产生感应电流,感应电流与行波
磁场相互作用产生电磁力推动动子加速;相对每一侧定子,动子受到的是排斥力,两侧的排斥力相互作用使动子总是处于中间位置而不会与定子铁芯相碰;通过调节变流器输出电压与频率就可以调节电机的推力和速度,控制策略简单并易于实现,无需精确的位置检测。
20.与现有技术相比,本发明的优点在于:
21.具有更高的速度、更大的推力、更稳定,采用双边长定子、动子感应板结构,具有推力大,动子质量轻,定子铁芯与铝板间具有稳定的法向电磁斥力。
附图说明
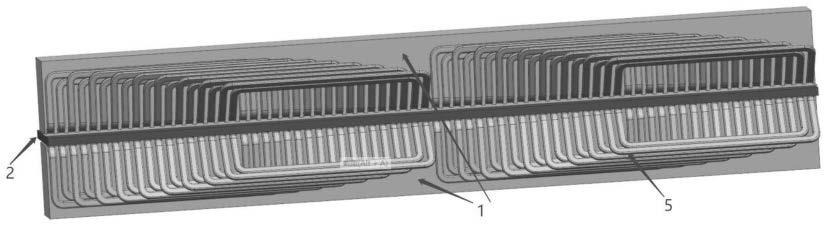
22.图1为本发明实施例双边长定子异步直线电机一段分段长度的三维结构示意图;
23.图2为本发明实施例双边长定子异步直线电机二维结构示意图;
24.图3为本发明实施例双边长定子异步直线电机多相绕组的同心式结构图;
25.图4为本发明实施例双边长定子异步直线电机多相绕组的“扇”形结构图;
26.图5为本发明实施例双边长定子分段规则示意图;
27.图6为本发明实施例双边长定子异步直线电机“独立并联供电”时的定子绕组联结方式示意图;
28.图7为本发明实施例双边长定子异步直线电机“串并联供电”时的定子绕组联结方式示意图;
29.图8为本发明实施例双边长定子异步直线电机“并串联供电”时的定子绕组联结方式示意图;
30.图9为本发明实施例多相变流器到双边长定子异步直线电机母线的连接示意图;
31.图10本发明实施例为双边长定子异步直线电机推力随滑差频率的变化图。
具体实施方式
32.为使本发明的目的、技术方案及优点更加清楚明白,以下根据附图并列举实施例,对本发明做进一步详细说明。
33.如图1至3所示,一种双边长定子分段并联供电异步直线电机驱动结构,采用双边长定子异步直线电机作为电磁弹射的直线驱动机构,
34.双边长定子异步直线电机主要包括:双边长定子1、动子感应板2、母线3、多相变流器4、多相绕组5和机械气隙6。
35.双边长定子1中间设置动子感应板2,但两者之间有一个机械气隙6的距离,多相绕组5由多个单相绕组组成,每一相绕组按照通电规律绕制在双边长定子1铁芯上,多相变流器4也由多个单相变流器组成,每个变流器控制一相定子绕组,通过对双边长定子1在同一位置或双边错开二分之一分段长度的位置进行等长度分段,分段长度为直线电机一对极距的整数倍,且远远小于动子感应板2长度,动子感应板2长度同样为一对极距的整数倍,使得动子所在分段的定子绕组具有大的负载电流,而非动子所在分段的定子绕组具有小的空载电流;长定子分段后再将全部分段定子绕组通过母线3并联接到多相变流器4的输出端,通过控制多相变流器4输出电压和电机滑差频率实现对驱动力的控制;电机采用多相绕组5,可减小谐波阻力和驱动力脉动,降低单相变流器容量,增加总驱动力,满足直线电磁弹射时稳定的大推力要求;同侧同相的每一段定子绕组全部通过母线并联后由独立的单相变流器
供电,可减小单台供电变流器的容量和并联母线的电流;直线电机动子采用非磁性铝板,结构简单,重量轻,在负载重量较轻的情况下可减小直线电机结构尺寸和变流器的容量;动子感应板2与双边长定子1铁芯间的法向力为自动对中的排斥力,有利于动子的稳定运行;电机采用异步控制,对位置检测精度要求低,控制策略简单并易于实现;方案可满足电磁弹射的超高速、大推力、快加速和运行稳定等需求。
36.其中:
37.本发明为了消除异步直线电机中定子与动子间的法向磁拉力,通过采用双边长定子和无铁芯铝动子结构,消除了定子铁芯对动子铝板的电磁吸力,定子与动子间只存在排斥力,此排斥力使得动子可稳定地处于双边定子的中间。在双边直线电机驱动中,电机既可以做成长定子,也可以做成短定子,为了节约成本大多数时候会选择短定子结构;但在电磁弹射驱动中,为了获得更大的加速度,需要动子结构简单且质量轻,因此该方案选用了双边长定子1、动子感应板2结构。
38.当给多相绕组5通入对称的交流电时,在不考虑端部效应的情况下,在双边定子之间的机械气隙6会产生沿运动方向分布的行波磁场,动子感应板2在切割行波磁场后,将在动子感应板2内产生感应电流,感应电流与行波磁场之间的相互作用会产生电磁力推动动子运动。通过控制定子电流和滑差频率来控制电机推力和速度的大小,不需要实时检测动子精确的位置信息,且在低速下也能完成精确控制。
39.如图4所示,采用多相绕组5是为了可减小谐波阻力和驱动力脉动,降低单相变流器容量和增大总驱动力,一般可以选择9相、12相和15相等;绕组相数越多,谐波阻力越小,驱动力脉动越小,绕组接线就越复杂;当每极每相下的槽数为1时,采用正常的波绕和叠绕方式即可;当每极每相下的槽数为2时,为了减小绕组的安装空间,可以采用同心式绕法。多相绕组5的形状结构也可以有多种,常见的是“l”形,在“l”字的末端固定绕组;而本实施例采用的安装方式是形状结构呈“扇”形,一方面是为了使每一相的定子电阻相等,另一方面是为了留出靠近动子感应板2重心的位置空间,使得动子滑块及其固定部件9能在靠近动子感应板2重心的位置安装,减小动子受到的抬头或点头力矩,从而增加动子感应板2运行的稳定性。
40.如图5所示,通过对双边长定子1在相同位置(图5a)或错位二分之一分段长度的位置(图5b)进行等长度分段,分段长度远远小于动子感应板2长度,且两者成整数倍关系,使得动子所在分段的定子具有大的负载电流,而非动子所在分段具有小的空载电流。
41.假设电机动子长度为n段长定子分段长度,则动子运动时,大多数时刻都只完全耦合n-1个定子段12,只有完全正对定子段时,才能完全耦合n个定子段。完全耦合段的定子可以输出全功率,非完全耦合段的定子输出功率就较小,动子受到的驱动力是波动的,动子长度覆盖的定子段数越多,电机推力的波动越小。
42.如图6至9所示,长定子分段后再将全部分段定子通过母线3并联接到多相变流器4的输出端,每相由一独立的单相变流器进行供电。并联供电的有三种典型方式:第一种是独立并联供电,单边所有分段电机绕组并联后独立由一套变流器供电,两侧长定子段各自并联到各自的母线上再由各自的变流器供电;第二种是串并联供电,双边同分段电机绕组串联后再并联到一条母线上由一套变流器供电;第三种是并串联供电,单边所有分段电机绕组并联到各自的母线上,再将双边母线串联,最后由一套变流器供电。
43.多相变流器4通过母线向长定子绕组供电的方式是把变流器安装在所供电的整段长定子中间,通过中间位置接到母线上,这样可以减小母线电流;通过多层在母线中间位置接入的方式,可大大减小靠近长定子的母线电流和母线截面积,有利于分段定子绕组的并联。
44.双边长定子异步直线电机采用异步驱动模式,通过控制变流器的输出电压和电机滑差频率实现对驱动力的控制。电机驱动力是随滑差频率的增加先增加再减小,工作点的滑差频率选在最大驱动力对应的滑差频率之前,这样驱动系统就是自稳的,当动子速度变慢时,滑差频率就会变大,驱动力就会随之增加,速度也会加快;反之,当动子运行速度变快接近同步速度时,滑差频率就会变小,驱动力也会随之减小,速度就会变慢。由于采用异步控制,所以不需要实时检测动子精确的位置。
45.如图10所示,通过对双边长定子异步直线电机进行等效电路计算,可以得到不同滑差频率下的牵引力大小;在正滑差率时,随着滑差频率的增大,牵引力先增加再减小,如果我们将工作点设置在最大牵引力对应的滑差率之后,双边长定子异步直线电机的控制无法平衡,只有将工作点设置在最大牵引力对应的滑差率之前,才能实现控制稳定。
46.本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的实施方法,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1