一种无刷直流电机换相精确检测方法
1.本发明涉及无刷直流电机无位置传感器检测技术领域,尤其是涉及一种无刷直流电机换相精确检测方法。
背景技术:
2.永磁无刷直流电机具有功率密度大、转动惯量小、调速性能好和效率高等特点,在工业、交通、家用电器等领域得到广泛应用。考虑到在一些特殊场合下,由于电机体积、工作温度等因素的影响,检测转子位置的传感器不能正常安装且易受损坏。为确保电机的正常运行,一般采用无位置传感器方法,通过对电机的电压、电流、反电动势等物理参数检测,再经过硬软件处理间接提取转子位置信息。无位置传感器方法包括反电动势法、续流二极管法、电感法以及基于数学模型或状态观测器的复杂算法,常用于换相点确定和转子位置估计。式中反电动势法比较简单,一般只需要测量电机电压,对电机参数的要求较少,不需要复杂的数字信号处理,因此得到了广泛的应用。
3.通常,反电动势法滤波处理采样信号,推导并建立参数采样信号与反电动势的逻辑关系或是物理模型,以此来确定电机换相位置。针对反电动势法存在的信号失真和滤波延迟,以及测速范围小、转子位置误差大、系统动态稳定性低等问题,提出一种基于浮相端电压脉宽调制(pwm)同步测量策略的反电动势过零换相检测方法,推导浮相端电压与反电动势函数间的关系,利用滞环比较器切换pwm同步采样状态,解决相反电动势过零点采样不稳定问题;充分考虑系统软硬件延迟以及数模转换器(adc)采样间隔延迟,利用相反电动势过零点精确检测的方法,实现对换相位置的准确判断。
技术实现要素:
4.本发明的目的是在保证电机换相系统稳定的前提下,补偿系统软硬件延迟以及adc采样间隔延迟,由浮相端电压采样波形对相反电动势过零点进行精确分析,实现宽调速范围内无刷直流电机转子换相位置的精确检测。
5.为实现上述目的,本发明提供了如下技术方案:
6.一种无刷直流电机换相精确检测方法,由离散的浮相端电压adc同步采样点判断反电动势过零时刻,确定换相的精确位置;在浮相端相反电动势小于零的区间段,由于二极管电压钳位作用的影响,无法通过adc采样直接获取端电压数值;本方案采用改进的相反电动势过零点检测方法,分相反电动势正向过零和反向过零两种情况讨论并判断精确换相时刻,实现对硬件系统延时,adc采样间隔延时以及程序软件延时的精确补偿,提高换相精度;
7.(1)相反电动势正向过零
8.设定一个端电压参考阈值δu,以采样交越δu作为相反电动势过零点判断依据,结合浮相端电压与相反电动势函数关系式,计算出相反电动势过零点到参考阈值点的时间间隔t0:
[0009][0010]
式中,t表示端电压周期;p,q表示谐波次数;e
p
,eq表示不同谐波下分解的相反电动势系数;
[0011]
由于adc采样系统具有离散化特性,在判断端电压波形是否交越过参考阈值时,会存在adc采样间隔引起的随机滞后延时δt,以及程序算法计算处理t0所造成的软件系统随机延时t
soft
。假设系统在第i个采样点处识别出交越信号,直到第i+n-1次采样后,程序算法结束,即满足(n-1)
·
ts<t
soft
≤n
·
ts,则第i+n次采样对应的采样时刻距实际端电压过零点的时间间隔t
α
可表示为:
[0012]
t
α
=t
hard
+t0+δt+n
·
ts[0013]
式中,ts为adc两个采样点间的采样时间间隔;t
hard
表示霍尔电压传感器采样造成的硬件电路延时。
[0014]
换相点延迟于相反电动势过零点30
°
固定电角度,因此可以在第i+n次采样点处预测出准确的换相时刻,即:
[0015][0016]
设定一个时钟定时器,使其定时周期t
x
大于端电压的波形周期t,提供一个客观时钟。在每个adc采样时刻捕获时钟定时器的时间值,将第i+n次采样点对应的采样时刻t
i+n
作为时钟定时器的计数起始时刻,经过计数时间δt
α
后达到换相时刻,由此实现对换相时刻的精确判断。
[0017]
(2)相反电动势反向过零
[0018]
相反电动势反向过零点判断同样以采样交越δu作为依据,且满足上述t0计算公式。为了通过程序预测得出实际相反电动势过零点,t0可表示为:
[0019]
t0=t
hard
+t
soft
+δt+t
′
[0020]
式中,t'表示人为设定的一个安全裕量。
[0021]
利用时钟定时器,记录第j次采样时刻所对应的定时器时间值为tj,tj为精确确定相反电动势过零点提供起始时间基准,当相反电动势过零点发生时,时钟定时器的时间计数值为
[0022]
t
β
=t
0-t
hard-δt
[0023]
换相点延迟于相反电动势过零点30
°
固定电角度,因此可以在yj对应的采样点处预测出准确的换相时刻,即:
[0024][0025]
将δt
β
写入定时器比较寄存器,当计数器的值等于δt
β
时,定时器与比较寄存器匹配,得到在相反电动势反向过零区间段对应的电机精确换相时刻。
[0026]
进一步的,本方案还通过滞回比较器实现hpwm_on-lon和hpwm_off-lon状态端电压采样的切换。滞回比较器的表达式可表示为:
[0027][0028]
式中,d-和d
+
分别代表滞后回线的两个跳变沿对应的pwm占空比值,d-和d
+
之间的区域被定义为过渡区域δd,且过渡区域δd的大小根据纹波电流最小的切换原则来选定,并满足:
[0029]
(1)电机处于加速过程,状态切换点为d
+
;在低速情况下,d<d
+
,以hpwm_off-lon状态获取电压采样信号;在高速情况下,d>d
+
,则以hpwm_on-lon状态获取电压采样信号;
[0030]
(2)电机处于减速过程,状态切换点为d-;在低速情况下,d<d-,以hpwm_off-lon状态获取电压采样信号;在高速情况下,d>d-,则以hpwm_on-lon状态获取电压采样信号。
[0031]
综上,本发明采用上述无刷直流电机换相精确检测方法,具备如下优势:
[0032]
(1)浮相端电压的变化量为相反电动势的1.5倍,将利于电机在较宽调速范围下的相反电动势过零点的检测;
[0033]
(2)通过滞回比较器实现hpwm_on-lon和hpwm_off-lon状态采样的过渡切换过程,确保在电机重复的加速和减速过程中,降低电流纹波干扰,维持系统稳定性;
[0034]
(3)采用软件算法实现对硬件系统延时,adc采样间隔引起的随机延时以及程序执行引起的算法延时的精确补偿,利用时钟定时器预测换相时刻,提高换相精度。
附图说明
[0035]
图1为无刷直流电机无位置传感器系统控制框图;
[0036]
图2为无刷直流电机等效电路;
[0037]
图3为c相开关管上桥臂pwm_on,b相开关管下桥臂on状态下电流通路;
[0038]
图4为c相开关管上桥臂pwm_off,b相开关管下桥臂on状态下电流通路;
[0039]
图5为浮相阶段a相端电压与相反电动势过零点关系示意图;
[0040]
图6为滞回采样状态原理图;
[0041]
图7为a相相反电动势正向过零区间段换相精确判断示意图;
[0042]
图8为a相相反电动势反向过零区间段换相精确判断示意图;
[0043]
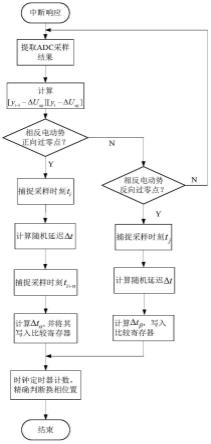
图9为软件程序设计流程框图。
具体实施方式
[0044]
以下结合附图和实施例对本发明的技术方案作进一步说明。
[0045]
本发明提供了一种精确检测无刷直流电机换相位置的方法,无刷直流电机的无位置传感器系统控制框图如图1所示。本发明具体实施步骤如下:
[0046]
1.无刷直流电机采用hpwm-lon两两导通驱动控制策略,存在6种不同的工作模式,并且在每60
°
电角度区间内,都有两相绕组处于驱动控制状态,一相处于浮相状态。无刷直流电机等效电路如图2所示,分别显示了三相逆变器、无刷电机以及用于端电压测量的分压电路。无刷直流电机三相绕组的端电压平衡方程为:
[0047][0048]
式中,u
ag
,u
bg
,u
cg
为端电压;ea,eb,ec为相反电动势;ia,ib,ic为相电流;r、l和m分别为三相对称绕组的电阻、自感和互感;un为定子绕组的中性点对地电位。
[0049]
无刷直流电机三相定子绕组为星形连接,建立广义非理想反电动势数学表达式为:
[0050][0051]
式中,e
p
,eq为反电动势系数。三相相反电动势分别相差120
°
相移,且满足a相n=0、b相n=1、c相n=2的条件。
[0052]
(1)分状态分析浮相端电压与相反电动势过零点的函数关系
[0053]
以c相pwm(脉冲宽度调制)控制,b相恒导通,a相处于浮相状态为例。选取浮相相电流ia为零的区间段,对端电压与相反电动势之间的波形相位关系进行分析讨论,电路存在两种工作状态,分别如下:
[0054]
状态一如图3所示,此时开关管处在上桥臂pwm_on下桥臂on状态,即电路b、c相开关管导通,a相为浮相,满足u
ag
=en+un,u
bg
=0,u
cg
=u
dc
。由式(1)可得,处于浮相状态的a相端电压与相反电动势的对应关系可表示为:
[0055][0056]
此时,当ea=0时,有u
ag
=u
dc
/2。即,反电动势过零点对应端电压为u
dc
/2。
[0057]
状态二如图4所示,开关管处在上桥臂pwm_off下桥臂on状态,此时的c相切换为二极管d2导通,满足u
ag
=en+un,u
bg
=u
cg
=0。a相端电压与相反电动势的对应关系表示为:
[0058][0059]
即,反电动势过零点对应端电压波形中的电位为0。
[0060]
式(3)和(4)表明,浮相端电压的变化量为相反电动势的3/2倍,这将利于相反电动势过零点检测。由于理想状态下相反电动势过零点超前于电机换相点30
°
电角度,结合上述两种状态分析,可得出a相浮相端电压与电机换相点之间的关系,如图5所示。根据三相绕组的对称性,在其他工作模式亦满足上述分析。
[0061]
(2)构建状态切换采样系统
[0062]
由于主电路开关管的pwm调制频率是固定的,常常为几khz到十几khz范围。随着电机转速的变化,pwm占空比也相应呈正相关改变。当电机转速增加到一定值时,pwm占空比很大,开关管处于hpwm_off-lon的状态所占周期十分有限,不利于电机绕组的相反电势过零点检测。因此,在转速较高时获得相反电势过零点是以hpwm_on-lon的状态为依据进行检测。而当转速较低时,情况完全相反,hpwm_on-lon状态所占周期十分有限,这时宜釆用hpwm_off-lon的状态来获取相反电势信号。
[0063]
通过滞回比较器实现hpwm_on-lon和hpwm_off-lon状态采样的过渡切换过程,其
滞回状态由图6所示,且滞回比较器的表达式可表示为:
[0064][0065]
式中,d-和d
+
分别代表滞后回线的两个跳变沿对应的pwm占空比值,d-和d
+
之间的区域被定义为过渡区域δd,且过渡区域δd的大小根据纹波电流最小的切换原则来选定,并满足:
[0066]
①
电机处于加速过程,状态切换点为d
+
;在低速情况下,d<d
+
,以hpwm_off-lon状态获取电压采样信号;在高速情况下,d>d
+
,则以hpwm_on-lon状态获取电压采样信号。
[0067]
②
电机处于减速过程,状态切换点为d-;在低速情况下,d<d-,以hpwm_off-lon状态获取电压采样信号;在高速情况下,d>d-,则以hpwm_on-lon状态获取电压采样信号。
[0068]
为了减小开关高频噪声对pwm测量的影响,在采用状态切换同步采样系统时,adc采样点总是选在pwm周期的较大部分,并且位于下一个跳变沿之前,最大限度地延长了开关噪声衰减的时间,提高了采样精度。采用滞回比较器的切换控制方式,能够保证在电机重复的加速和减速过程中,降低电流纹波干扰,维持系统稳定性。
[0069]
2.电机绕组处于浮相期间时,其端电压只有在相反电动势大于零的区间段不受电压钳位的影响,满足公式(3)和(4)运算。因此需要改进相反电动势过零点检测方法,同时实现对硬件系统延时,adc采样间隔引起的随机延时以及程序算法执行引起的软件延时的精确补偿,提高换相精度。
[0070]
下面以τ(d)=0,a相相反电动势正向过零区间段θ∈[-π/6,π/6]和a相相反电动势反向过零区间段θ∈[-5π/6,7π/6]为例,分别讨论相反电动势过零时刻以及换相位置。
[0071]
(1)a相相反电动势正向过零区间段θ∈[-π/6,π/6]
[0072]
当ea<0时,端电压采样波形会受到二极管钳位作用的影响,因此通过选用ea>0的区间段θ∈[0,π/6]进行相反电动势过零点判断分析。
[0073]
根据式(2)和(4),浮相端电压的详细表达式为:
[0074][0075]
式中,e
p
,eq为相反电动势系数。
[0076]
在实际的采样电路系统中,要考虑到由霍尔电压传感器采样所造成的硬件电路延迟,通过元件手册可查得相应反应时间为t
hard
。则经过硬件电路采样后的浮相端电压表达式为:
[0077][0078]
式中,ω表示电机转速。
[0079]
图7中,实线表示实际的a相浮相端电压u
ag
,虚线表示受硬件电路延迟影响的端电压采样波形u
ag
′
。为了判断出相反电动势过零点的实际位置,定义一个大于零的端电压参考阈值δu
ag
,且满足u
ag
′
采样过零点到该参考阈值的时间间隔为t0,则δu
ag
可表示为:
[0080][0081]
端电压周期为t,由于pwm调制频率常常为几khz到十几khz范围,故总有t0<<t即t0趋近于0,此时sin(ωt0)≈ωt0。由于相反电动势系数满足条件e1(低阶)/e
11
(高阶)>>1,反电动势的高阶项可以忽略不计。因此,将式(8)简化为:
[0082][0083]
当参考阈值δu
ag
选定后,t0只与相反电动势系数以及端电压周期有关。由此可得到:
[0084][0085]
以采样波形交越过δu
ag
作为过零点检测判断依据,利用离散采样点检测过零的原理,当检测到第i-1次的采样结果y
i-1
与第i次adc采样结果yi满足如下关系时:
[0086]
[y
i-1-δu
ag
][y
i-δu
ag
]≤0
ꢀꢀꢀ
(11)
[0087]
则端电压波形交越过δu
ag
。且系统在yi处检测识别出交越信号,yi对应的采样时刻ti滞后于设定的δu
ag
,滞后时间间隔为δt。根据相似三角形原理,随机延时δt可表示为:
[0088][0089]
式中,ts表示为两个采样点间的采样时间间隔。
[0090]
软件算法在计算t0时会造成系统的随机延迟t
soft
。假设在第i+n-1次采样后,该程序算法结束,即满足(n-1)
·
ts<t
soft
≤n
·
ts,通过程序可判断n值。因此,y
i+n
对应的采样时刻t
i+n
与实际端电压过零点的时间间隔t
α
可表示为:
[0091]
t
α
=t
hard
+t0+δt+n
·
tsꢀꢀꢀ
(13)
[0092]
设定一个时钟定时器,使其定时周期t
x
大于端电压周期t,提供一个客观时钟。根据换相点延迟于相反电动势过零点30
°
固定电角度,可以在y
i+n
对应的采样点处预测出准确的换相时刻,即:
[0093][0094]
在每个adc采样时刻捕获时钟定时器的时间值,将第i+n次采样点对应的采样时刻t
i+n
作为时钟定时器的计数起始时刻,经过计数时间δt
α
后达到换相时刻,由此实现对换相时刻的精确判断。
[0095]
(2)a相相反电动势反向过零区间段θ∈[5π/6,7π/6]
[0096]
同样的,当ea<0时,端电压采样波形会受到二极管钳位作用的影响,因此选用ea>0的区间段θ∈[5π/6,π],利用端电压波形adc采样预测换相时刻,如图8所示。在参考阈值δu
ag
选定的情况下,通过计算t0,预测出实际相反电动势过零点,推导公式同式(10)。且令:
[0097]
t0=t
hard
+t
soft
+δt+t
′ꢀꢀꢀ
(15)
[0098]
式中,t'表示人为设定的一个安全裕量。
[0099]
由时钟定时器提供时间基准,将第j个采样点yj对应的采样时刻tj作为时钟定时器的计数起始时刻,得出相反电动势过零点发生时,时钟定时器的时间值为
[0100]
t
β
=t
0-t
hard-δt
ꢀꢀꢀ
(16)
[0101]
根据换相点延迟于相反电动势过零点30
°
固定电角度,可以在tj预测得出准确的换相位置,即:
[0102][0103]
将δt
β
写入比较寄存器,当计数器的值等于δt
β
时,定时器与比较寄存器匹配,得到在θ∈[5π/6,7π/6]区间段对应的电机精确换相时刻。t0,t
β
,δt
β
之间的关系也表示在图8中。
[0104]
τ(d)=1的情况与上述分析类似,所不同的是浮相端电压的详细表达式叠加了一个u
dc
/2的直流偏置分量,影响了δu
ag
参考值的选定,这里不再赘述。根据电机绕组的对称性,abc三相处于浮相阶段时,均可采用上述方法实现对电机换相位置的精确判断。具体软件程序设计流程框图如图9所示。
[0105]
综上可知,考虑到电机驱动的硬件系统延时,软件程序算法延时,以及adc采样间隔引起的随机延时,采用改进的相反电动势过零点检测方法,分别对浮相端的相反电动势正向过零阶段以及反向过零阶段进行了分析判断,利用时钟定时器实现对换相时刻的精确判断。
[0106]
以上是本发明的具体实施方式,但本发明的保护范围不应局限于此。任何熟悉本领域的技术人员在本发明所揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内,因此本发明的保护范围应以权利要求书所限定的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1