光伏设备监测系统的制作方法
1.本发明属于光伏设备技术领域,更具体地说,是涉及一种光伏设备监测系统。
背景技术:
2.光伏发电是利用半导体界面的光生伏特效应而将光能直接转变为电能的一种技术。主要由太阳能电池板(组件)、控制单元和逆变器三大部分组成,主要部件由电子元器件构成。太阳能电池经过串联后进行封装保护可形成大面积的太阳电池组件,再配合上功率控制单元等部件就形成了光伏发电装置。光伏发电不排放温室气体,对环境友好,同时随着成本的逐年下降,现已成为继风力发电之后的又一商业潜力巨大的清洁能源。
3.随着光伏电池板安装密度的增加,发生不确定故障的几率也随之增加,若在光伏电池板发生故障之后再进行维护,会导致光伏电池板大面积停产,影响正常的生产经营。因而需要对光伏设备进行实时监测,在光伏设备出现异常时及时进行维护,避免发生大面积停产的事故。
技术实现要素:
4.本发明的目的在于提供一种光伏设备监测系统,旨在解决现有技术中光伏设备无法进行事故预警,容易导致光伏设备大面积停产的问题。
5.为实现上述目的,本发明采用的技术方案是:提供一种光伏设备监测系统,包括:
6.电压监测单元,与光伏组件连接,用于监测光伏组件的电压;
7.热斑监测单元,用于监测光伏组件的热斑故障;
8.电量监测单元,与光伏组件连接,用于监测光伏组件的发电量;
9.图像采集单元,用于采集光伏组件及光伏组件周围环境的图像;以及
10.控制单元,分别与所述电压监测单元、所述热斑监测单元、所述电量监测单元和所述图像采集单元通讯连接。
11.在一种可能的实现方式中,所述热斑监测单元包括:
12.温度传感器;
13.安装架,围设于光伏组件的外侧;以及
14.驱动组件,设于所述安装架,所述驱动组件包括连接于所述安装架的第一驱动机构,和连接于所述第一驱动机构的第二驱动机构,所述第二驱动机构与所述温度传感器连接,所述第一驱动机构控制所述第二驱动机构沿第一路径移动,所述第二驱动机构控制所述温度传感器沿第二路径移动,所述第一路径垂直于所述第二路径。
15.在一种可能的实现方式中,所述光伏设备监测系统还包括设于光伏组件上的定位单元,和分别与所述图像采集单元和所述控制单元通讯连接的清洁单元,所述定位单元分别与所述控制单元和所述清洁单元通讯连接,所述清洁单元包括设于所述第二驱动机构的清扫组件。
16.在一种可能的实现方式中,所述清扫组件包括设于所述第二驱动机构的风机,所
述风机用于对光伏组件的向光面鼓风。
17.在一种可能的实现方式中,所述清洁单元还包括设于移动设于多组光伏组件之间的清洁机器人,所述清洁机器人分别与所述图像采集单元和所述控制单元通讯连接,所述清洁机器人用于对光伏组件表面进行清洗。
18.在一种可能的实现方式中,所述清洁机器人包括:
19.底座;
20.行走模块,设于所述底座内,所述行走模块用控制所述底座移动;
21.机械臂模块,连接于所述底座,所述机械臂模块能够绕第一轴线转动,所述第一轴线垂直于上下方向;以及
22.清理模块,连接于所述机械臂模块,所述清理模块用于清理光伏组件。
23.在一种可能的实现方式中,所述第一驱动机构包括:
24.第一驱动器,设于所述安装架;
25.第一螺杆,分别连接于所述第一驱动器和所述安装架,所述第一螺杆的轴线平行于所述第一路径;
26.第一导向杆,与所述安装架连接,所述第一导向杆的轴线平行于所述第一螺杆的轴线;以及
27.固定板,与所述第一螺杆螺纹连接,并沿所述第一路径滑动穿设于所述第一导向杆。
28.在一种可能的实现方式中,所述第二驱动机构包括:
29.第二驱动器,设于所述固定板;
30.第二螺杆,分别连接于所述第二驱动器和所述固定板,所述第二螺杆的轴线平行于所述第二路径;
31.第二导向杆,与所述固定板连接,所述第二导向杆的轴线平行于所述第二螺杆的轴线;以及
32.固定块,沿所述第二路径滑动连接于所述固定板,所述固定块与所述第二螺杆螺纹连接,并沿所述第二路径滑动穿设于所述第二导向杆,所述温度传感器设于所述固定块。
33.在一种可能的实现方式中,所述热斑监测单元还包括设于所述固定块的热成像仪,所述热成像仪与所述控制单元通讯连接。
34.在一种可能的实现方式中,所述安装架包括:
35.第一伸缩模块,设于支撑面,且能够沿上下方向伸缩,所述第一伸缩模块沿所述第一路径设于光伏组件的一侧;
36.第二伸缩模块,设于支撑面,且能够沿上下方向伸缩,所述第二伸缩模块沿所述第一路径设于光伏组件的另一侧;以及
37.安装框,分别与所述第一伸缩模块和所述第二伸缩模块的伸缩端连接,所述安装框围设于光伏组件外。
38.本发明提供的光伏设备监测系统的有益效果在于:与现有技术相比,本发明光伏设备监测系统分别对光伏组件的电压、电量进行监测,并通过热斑监测单元监测光伏组件的热斑故障,电压监测单元、电量监测单元和热斑监测单元将监测到的数据传输至控制单元,控制单元对接收到的数据进行分析比对,在光伏组件的电压、电量异常或出现热斑故障
时生成预警信号。图像采集单元对光伏组件及周围环境进行图像采集,在光伏组件上落入杂物或发生损坏时可以及时采集相应的图像,并向控制单元发出相应数据,使工作人员可以第一时间获取相应信息并进行处理。本发明可以对光伏组件进行实时监控,无需人工巡视,节约了人力资源,也避免了在光伏组件出现故障导致大范围停产后再进行后期维护,可以在光伏组件出现异常的初期进行处理,确保了光伏组件的持续运行。
附图说明
39.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
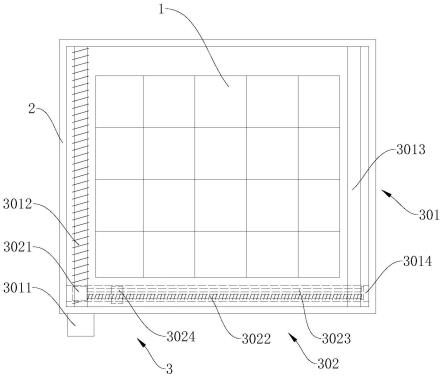
40.图1为本发明实施例一提供的光伏设备监测系统的俯视图;
41.图2为本发明实施例一提供的光伏设备监测系统的侧视图;
42.图3为本发明实施例一采用的第二驱动机构的局部示意图;
43.图4为本发明实施例二采用的清洁机器人的结构示意图;
44.图5为本发明实施例三采用的清理模块的剖视图。
45.图中:1、光伏组件;2、安装框;3、驱动组件;301、第一驱动机构;3011、第一驱动器;3012、第一螺杆;3013、第一导向杆;3014、固定板;302、第二驱动机构;3021、第二驱动器;3022、第二螺杆;3023、第二导向杆;3024、固定块;4、温度传感器;5、风机;6、清洁机器人;601、底座;602、机械臂模块;603、清洁模块;6031、安装壳;6032、清洗带;6033、抵接块;6034、弹性件;6035、张紧轮;6036、安装块;6037、滚轮;6038、清洗箱;6039、刮板。
具体实施方式
46.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
47.请一并参阅图1及图2,现对本发明提供的光伏设备监测系统进行说明。光伏设备监测系统,包括电压监测单元、热斑监测单元、电量监测单元、图像采集单元和控制单元,电压监测单元与光伏组件1连接,用于监测光伏组件1的电压;热斑监测单元用于监测光伏组件1的热斑故障;电量监测单元与光伏组件1连接,用于监测光伏组件1的发电量;图像采集单元用于采集光伏组件1及光伏组件1周围环境的图像;控制单元分别与电压监测单元、热斑监测单元、电量监测单元和图像采集单元通讯连接。
48.本发明提供的光伏设备监测系统,与现有技术相比,本发明光伏设备监测系统分别对光伏组件1的电压、电量进行监测,并通过热斑监测单元监测光伏组件1的热斑故障,电压监测单元、电量监测单元和热斑监测单元将监测到的数据传输至控制单元,控制单元对接收到的数据进行分析比对,在光伏组件1的电压、电量异常或出现热斑故障时生成预警信号。图像采集单元对光伏组件1及周围环境进行图像采集,在光伏组件1上落入杂物或发生损坏时可以及时采集相应的图像,并向控制单元发出相应数据信号,使工作人员可以第一时间获取相应信息并进行处理。本发明可以对光伏组件1进行实时监控,无需人工巡视,节
约了人力资源,也避免了在光伏组件1出现故障导致大范围停产后再进行后期维护,可以在光伏组件1出现异常的初期进行处理,确保了光伏组件1的持续运行。
49.需要说明的是,热斑故障是指在一定条件下,一串联支路中被遮蔽的光伏电池组件,将被当做负载消耗其他有光照的光伏电池组件所产生的能量,此时被遮蔽的光伏电池组件存在发热严重的现象。造成热斑故障的原因一般分为两部分,一方面是由于制造缺陷如焊接错差,导致电池表面存在微型裂缝,断线等缺陷;另一方面,造成热斑故障的重要条件则是存在部分阴影的遮蔽。这部分阴影可以说的短时的,例如由于建筑物等实物的遮蔽会随着太阳光入射角度的改变而消失。但由落叶,光伏电池板周围植被以及鸟类排泄物等造成的遮蔽,绝大多数情况则是长时间的遮蔽。在此情况下,长时间地发热,可能会导致大面积光伏电池损坏,甚至造成火灾。
50.可选的,电压监测单元包括电压传感器,电量监测单元包括电量传感器,图像采集单元包括摄像头。
51.在一些实施例中,请参阅图1及图3,热斑监测单元包括温度传感器4、安装架和驱动组件3;安装架围设于光伏组件1的外侧;驱动组件3设于安装架,驱动组件3包括连接于安装架的第一驱动机构301,和连接于第一驱动机构301的第二驱动机构302,第二驱动机构302与温度传感器4连接,第一驱动机构301控制第二驱动机构302沿第一路径移动,第二驱动机构302控制温度传感器4沿第二路径移动,第一路径垂直于第二路径。
52.第一驱动机构301控制第二驱动机构302沿第一路径移动,第二驱动机构302控制温度传感器4沿第二路径移动,从而实现温度传感器4可以既可以沿第一路径移动,也可以沿第二路径移动。本实施例中的方案可以控制温度传感器4自由移动,从而对光伏组件1的温度进行全面监测。在光伏组件1温度异常时可以第一时间将数据发送至控制单元,以便工作人员进行处理。
53.可选的,第一驱动机构301和第二驱动机构302均为气缸或液压缸。
54.在一些实施例中,光伏设备监测系统还包括设于光伏组件1上的定位单元,和分别与图像采集单元和控制单元通讯连接的清洁单元,定位单元分别与控制单元和清洁单元通讯连接,清洁单元包括设于第二驱动机构302的清扫组件。
55.定位单元对光伏组件1定位,图像采集单元监测到光伏组件1上掉落有杂物时,或光伏组件1表面积聚有灰尘后,生成清理信号,控制单元根据清理信号和定位单元提供的定位信息控制相应的清扫组件对光伏组件1进行清理。避免杂物或灰尘影响光伏组件1的正常运行,也避免光伏组件1出现热斑故障。清扫组件可以在第一驱动机构301和第二驱动机构302的作用下沿第一路径和第二路径移动,以便对光伏组件1上的杂物或灰尘精准清除。
56.在一些实施例中,请参阅图3,清扫组件包括设于第二驱动机构302的风机5,风机5用于对光伏组件1的向光面鼓风。
57.风机5向光伏组件1的向光面鼓风,从而将光伏组件1向光面的杂物和灰尘去除,避免影响光伏组件1的正常工作。本实施例中的方案无需与光伏组件1直接接触,避免划伤或磨损光伏组件1,提高了光伏组件1的使用寿命。
58.可选的,风机5可以与外部电源连接,也可以在风机5内设置电池供电,还可以将风机5与光伏组件1电连接,通过光伏组件1产生的电能对风机5供电。
59.在一些实施例中,请参阅图4,清洁单元还包括设于移动设于多组光伏组件1之间
的清洁机器人6,清洁机器人6分别与图像采集单元和控制单元通讯连接,清洁机器人6用于对光伏组件1表面进行摩擦清洗。
60.清扫组件可以对光伏组件1上洒落或积聚的灰尘进行清扫,但光伏组件1上粘附的污渍无法被清理,长期粘附在光伏组件1上容易影响光伏组件1的光电转换效果,甚至产生热斑影响光伏组件1的使用寿命。当图像采集单元监测到光伏组件1上出现污渍时,生成清洁信号,控制单元根据清洁信号和定位单元的定位信息控制清洁机器人6移动至该光伏组件1处,并对光伏组件1表面进行清洗,将光伏组件1上的污渍清理。本实施例中的方案无需人工巡视,也降低了认同清理产生的劳动量,通过清洁机器人6自动完成对光伏组件1的清洁,提高了清洁效率。
61.在一些实施例中,请参阅图4,清洁机器人6包括底座601、行走模块、机械臂模块602和清理模块;行走模块设于底座601内,行走模块用控制底座601移动;机械臂模块602连接于底座601,机械臂模块602能够绕第一轴线转动,第一轴线垂直于上下方向;清理模块连接于机械臂模块602,清理模块用于清理光伏组件1。
62.行走模块控制底座601移动,使底座601移动至相应的光伏组件1处,机械臂模块602控制清理模块移动至与光伏组件1表面接触,然后通过清理组件对光伏组件1施加摩擦力进行清理。
63.具体地,行走模块包括行走轮和与行走轮连接的驱动装置,驱动装置控制行走轮转动。
64.作为机械臂模块602的一种具体实施方式,请参阅图4,机械臂模块602包括转动连接的第一机械臂和第二机械臂,第一机械臂通过第一转轴与底座601连接,第二机械臂通过第二转轴与清理模块连接,第一机械臂内设有第一驱动设备,第一驱动设备控制第一机械臂绕第一转轴转动,第二机械臂内设有第二驱动设备,第二驱动设备控制第二机械臂绕第二转轴转动,第二机械臂内还设有第三驱动设备,第三驱动设备控制清理组件转动。
65.本实施例中可以通过第一驱动设备和第二驱动设备控制第一机械臂和第二机械臂的转动,从而调节清理模块的位置,使清理模块与光伏组件1上下对应。然后通过第三驱动设备控制清理组件转动至与光伏组件1贴合,以完成对光伏组件1的清理。
66.需要说明的是,机械臂模块602也可以为其他的现有机械臂结构,以可以实现机械臂的自由转动,机械臂模块602的具体结构不是本技术的发明点,以上实施例仅作为一种具体的实施方式,不限定本技术中机械臂模块602的结构。
67.作为清理模块的一种具体实施方式,请参阅图5,清理模块包括安装壳6031、滚轮机构和清洗带6032,安装壳6031具有一端开口的安装腔,安装壳6031与机械臂模块602连接;滚轮机构包括多个绕第二轴线转动设于安装腔内的滚轮6037;清洗带6032绕设于滚轮6037机构外,用于与光伏组件1接触。
68.机械臂模块602控制清洗带6032与光伏组件1接触,并控制安装壳6031移动,通过清洗带6032与光伏组件1之间的摩擦力对光伏组件1进行清洗。在清洗时,清洗带6032与光伏组件1之间的摩擦力使清洗带6032移动,并带动滚轮6037转动,从而使清洗带6032上不同的清洗面对光伏组件1进行清洁。
69.具体地,清洗带6032为柔性构件,例如海绵、清洁布等,避免磨损或划伤光伏组件1表面。
70.具体地,清洗带6032与光伏组件1接触的一面凸出于安装腔外。
71.需要说明的是,本实施例的方案先通过风机将光伏组件表面的灰尘和杂物吹落,然后再通过清洗带6032对光伏组件1的表面进行清洗,避免光伏组件1上的灰尘在清洗过程中磨损光伏组件1的表面。
72.作为清理模块的另一种具体实施方式,请参阅图5,清洗模块还包括设于安装腔内的张紧机构,张紧机构包括转动设于安装腔内的张紧轮6035,张紧轮6035的轴线平行于滚轮6037的轴线,张紧轮6035与清洗带6032抵接,用于使清洗带6032处于张紧状态。
73.若在清洗带6032松动时,无法在移动时与光伏组件1产生足够的摩擦力以将光伏组件1表面的污垢清洗掉,张紧轮6035能够使清洗带6032保持张紧状态,从而增加与光伏组件1的摩擦力和接触面,确保对光伏组件1进行有效清洗,提高清洗效率。
74.作为张紧机构的一种具体实施方式,请参阅图5,张紧轮6035通过连接轴与安装腔转动连接,且安装腔内开设有滑槽,连接轴滑动设于滑槽内,张紧机构还包括设于安装腔内的顶推机构,顶推机构用于使张紧轮6035在滑槽内滑动,以使清洗带6032保持张紧状态。
75.清洗带6032在长期使用过程中容易发生松动,从而影响对光伏组件1的清洗效果,常用的方式需要将张紧轮6035拆卸后重新安装,通过改变张紧轮6035的位置使清洗带6032保持张紧状态。本实施例中通过顶推机构使连接轴在滑槽内滑动,从而使张紧轮6035始终与清洗带6032抵接,保证清洗带6032处于张紧状态,无需拆卸张紧轮6035,简化了调节工序,提高了清洗效率。
76.可选的,顶推机构包括安装块6036、抵接块6033、和弹性件6034,安装块6036设于安装腔内,安装块6036上开设有容置槽;抵接块6033沿第三路径滑动设于容置槽内;弹性件6034设于容置槽内,弹性件6034被配置有使抵接块6033与张紧轮6035抵接的预紧力。
77.弹性件6034使抵接块6033与张紧轮6035始终保持抵接状态,当清洗带6032松动时,在弹性件6034的作用下抵接块6033对张紧轮6035施加推力,使连接轴在滑槽内滑动,从而使张紧轮6035与清洗带6032抵接,保证清洗带6032始终处于张紧状态。本实施例中的结构简单,无需使用驱动装置,降低了清洗组件的重量和生产成本,而且在清洗带6032出现松动时可以及时进行调整,确保对光伏组件1进行有效清洗。
78.可选的,安装腔内还设有刮板6039,刮板6039与清洗带6032背离安装腔开口的一端抵接,在清洗带6032时将清洗带6032上的污垢刮除。
79.可选的,安装壳6031还设有一端插入安装腔内的清洗箱6038,清洗箱6038用向清洗带6032上喷淋清洗液。
80.在一些实施例中,请参阅图1,第一驱动机构301包括第一驱动器3011、第一螺杆3012、第一导向杆3013和固定板3014,第一驱动器3011设于安装架;第一螺杆3012分别连接于第一驱动器3011和安装架,第一螺杆3012的轴线平行于第一路径;第一导向杆3013与安装架连接,第一导向杆3013的轴线平行于第一螺杆3012的轴线;固定板3014与第一螺杆3012螺纹连接,并沿第一路径滑动穿设于第一导向杆3013。
81.第一驱动器3011控制第一螺杆3012转动,固定板3014在第一导向杆3013的作用下无法转动,从而随第一螺杆3012的转动沿第一路径移动。将转动运动转换为直线运动,可以精确控制固定板3014的移动路径,从而对光伏组件1进行精确有效的监测。
82.具体地,安装架上设有轴承,第一螺杆3012连接于轴承。
83.在一些实施例中,请参阅图1,第二驱动机构302包括第二驱动器3021、第二螺杆3022、第二导向杆3023和固定块3024,第二驱动器3021设于固定板3014;第二螺杆3022分别连接于第二驱动器3021和固定板3014,第二螺杆3022的轴线平行于第二路径;第二导向杆3023与固定板3014连接,第二导向杆3023的轴线平行于第二螺杆3022的轴线;固定块3024沿第二路径滑动连接于固定板3014,固定块3024与第二螺杆3022螺纹连接,并沿第二路径滑动穿设于第二导向杆3023,温度传感器4设于固定块3024。
84.第二驱动器3021控制第二螺杆3022转动,第二导向杆3023对固定块3024限位,从而使固定块3024随第二螺杆3022的转动沿第二路径移动。将转动运动转换为直线运动,可以精确控制固定板3014的移动路径,从而对光伏组件1进行精确有效的监测。
85.具体地,固定板3014上设有轴承,第二螺杆3022连接于轴承。
86.在一些实施例中,热斑监测单元还包括设于固定块3024的热成像仪,热成像仪与控制单元通讯连接。
87.热成像仪也称为红外热像仪,是利用红外探测器和光学成像物镜接受被测目标的红外辐射能量分布图形反映到红外探测器的光敏元件上,从而获得红外热像图。通过热成像仪获取光伏电池表面的红外热像图,从而确定光伏组件1表面是否存在热斑故障。本实施例中的方案可以通过第一驱动机构301和第二驱动机构302控制热成像仪在光伏组件1上方移动,无需人工手持热成像仪进行检查,降低了劳动量。
88.可选的,热斑监测单元还包括与控制单元通讯连接的计时器。计时器设定一定的时间段,当达到第一预设时间时,计时器生成启动信号,控制单元根据启动信号控制第一驱动机构301和第二驱动机构302启动,同时控制热成像仪启动,从而使热成像仪对光伏组件1进行监测。当达到第二预设时间时,计时器生成关闭信号,控制单元根据关闭信号控制第一驱动机构301、第二驱动机构302和热成像仪关闭。
89.需要说明的是,第一预设时间和第二预设时间可以设定,第一预设时间可以设置多个,在不同的时间段对光伏组件1进行监测,第二预设时间为依据与第一预设时间设定,使第二预设时间与第一预设时间之间的区域满足热成像仪对光伏组件1的表面完全完成监测。
90.在一些实施例中,请参阅图1,安装架包括第一伸缩模块、第二伸缩模块和安装框2,第一伸缩模块能够沿上下方向伸缩,第一伸缩模块沿第一路径设于光伏组件1的一侧;第二伸缩模块能够沿上下方向伸缩,第二伸缩模块沿第一路径设于光伏组件1的另一侧;安装框2分别与第一伸缩模块和第二伸缩模块转动连接,安装框2沿第一路径伸缩,安装框2围设于光伏组件1外。
91.光伏组件1为了增加受光面积,通常倾斜设置,调节第一伸缩模块和第二伸缩模块的伸缩量,使安装框2在上下方向的倾斜角度与光伏组件1的倾斜角度相同,以对光伏组件1进行有效监测。在不需监测时,第一伸缩模块和第二伸缩模块下降,使安装框2位于光伏组件1下方,避免影响光伏组件1的受光面积。
92.可选的,第一伸缩模块包括两个相互平行的第一伸缩杆,第二伸缩模块包括两个相互平行的第二伸缩杆。
93.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1