一种打磨单元偏转控制装置、系统及钢轨打磨车的制作方法
1.本发明涉及轨道工程机械领域,尤其涉及一种打磨单元偏转控制装置、系统及钢轨打磨车。
背景技术:
2.随着铁路运量和载重的不断增加,钢轨表面和内部容易出现各种损伤和缺陷,如波磨、裂纹、剥离、压溃、点蚀和肥边等。如不进行及时修复,这些缺陷会加速恶化,从而带来高昂的钢轨更换成本。钢轨打磨是消除钢轨病害和修复钢轨廓形的主要手段,利用钢轨打磨技术进行线路维护已成为国内外轨道养护的共识,其应用越来越普及,也为铁路系统创造了很大的效益。
3.钢轨打磨车是用于对线路钢轨表面进行磨削加工,以消除钢轨表面缺陷(锈蚀、疲劳裂纹、不平顺、波磨、肥边、变形等)的设备。打磨车下部设有多个打磨小车,打磨小车在整车的牵引下在钢轨上进行连续打磨作业。每个打磨小车内部设有打磨单元100,打磨单元100为钢轨打磨车的核心机构。如附图1所示,打磨单元100由可旋转的偏转机构2(又称为摇篮)、打磨电机1、打磨砂轮(又称为打磨头3)、打磨下压油缸(即下压驱动机构7)、导向杆(即下压导柱4)、导向套(即下压导套5)及调节机构等组成。两组下压导柱4的上部通过连接架6相连,下压导柱4的下部固定连接于偏转机构2上。下压驱动机构7的一端连接至连接架6,另一端通过连接臂板10连接至打磨电机1的外表面。打磨电机1与打磨头3直联并驱动其高速旋转,同时打磨电机1安装在下压导套5上,通过控制下压驱动机构7来驱动下压导套5沿下压导柱4的轴向运动,实现打磨电机1的下压打磨作业,而调节机构用以保证打磨的位置、质量和效率并避开障碍物保证安全。随着铁路运行速度的不断提升,尤其是高速铁路的快速发展,对钢轨打磨车的作业精度要求越来越高,作业精度的核心在于打磨单元100的偏转控制和下压控制。尤其是对打磨单元偏转角度的精确调整控制是决定打磨质量的关键因素,直接影响着打磨后钢轨的廓形精度,而其控制精度的保证一直是一个技术难题。
4.打磨头3与钢轨200之间的接触为线型接触,每个砂轮在钢轨200上打磨形成一个光亮带(细长平面),多个打磨头3通过不同的角度分布形成多个光亮带,从而覆盖整个钢轨200的轨面。偏转机构2设有转轴,可在偏转驱动机构8的驱动下,朝向钢轨内外侧产生所需的偏转角度。现有国铁打磨车打磨单元100的偏转角度范围一般为-25
°
~+70
°
,其角度偏转实现形式主要有两种:一种为偏转油缸(即偏转驱动机构8)一级偏转,另一种为摆动油缸(即摆动驱动机构9)+偏转电缸(即偏转驱动机构8)两级偏转。偏转油缸和偏转电缸内部自带行程传感器,通过长度的变化来确定打磨头3的偏转角度。其中,采用偏转油缸偏转方式的打磨单元100偏转结构如附图3所示,而采用摆动油缸+偏转电缸两级偏转方式的打磨单元100偏转结构如附图4所示。
5.如附图5所示,偏转机构2(即摇篮)的转动点为o点,偏转油缸(即偏转驱动机构8)在车架上的安装点为b点,偏转油缸在偏转机构2上的安装点为a点,ob的线段长b为固定值,oa的线段长a为固定值,ab线段长度l随着偏转油缸伸缩而产生变化。打磨电机1的偏转角度
α为打磨电机重力垂线与旋转轴之间的夹角,打磨电机外偏角度为
“‑”
,打磨电机内偏角度为“+”;α=0
°
时,偏转油缸或偏转电缸的长度为l0(此时∠aob=θ0)。
6.根据上述余弦定理:
[0007][0008]
可得:
[0009][0010][0011]
因此:
[0012][0013]
其中,偏转油缸收缩后的最小长度为l
min
,反馈电压为v
min
;偏转油缸伸出后的最大长度为l
max
,反馈电压为v
max
;v
目标
为目标长度l
目标
所对应的偏转油缸反馈电压。
[0014]
然而,在实际的使用中发现,现有控制方式实测打磨单元的偏转角度与理论角度存在较大的误差,如附图2所示(图中纵坐标代表偏转角度,单位为
°
;横坐标代表行程电压,单位为v),最大误差达到2
°
,而且同一台打磨车上的不同打磨单元的误差也不同,一致性差,不能满足《tb/t3520-2018铁路大型养路机械钢轨打磨车》标准所要求的
±
0.5
°
偏转角度误差范围要求。
[0015]
综上,现有打磨单元偏转控制方式存在的技术问题主要有:
[0016]
(1)打磨单元偏转控制精度差,从而严重影响打磨质量。产生该问题的原因主要在于:一是加工误差,实际加工组装后a、o、b三点的位置存在一定误差,导致a、b、l0的尺寸与理论存在偏差,而该偏差现场无法测量,且会对偏转角度的精度造成较大的影响。二是打磨单元架结构弹性变形,不同的偏转角度,重力对打磨单元造成的形变不同,导致打磨单元在不同偏转角度情况下的角度变形不同。三是各偏转轴的间隙影响,主要为转动轴承内部间隙、轴承与销轴之间间隙,油缸内间隙。四是偏转油缸行程传感器反馈电压信号的精度及线性度误差。由于以上四种原因很难得到消除,因此偏转角度的误差控制成为一个技术难题,很难进一步提高其偏转精度。
[0017]
(2)打磨偏转角度标定效率低,人工误差大。产生该问题的原因主要在于:为了提高偏转角度标定精度,往往通过多点标定分段修正的措施进行标定,但是相对工作量较大。同时现有标定方法采用的倾角仪为单轴倾角仪,必须依靠人工凭观察和经验放置在旋转面上,测试的倾角才准确。标定受人员操作影响较大,效率低且精度难以保证。
[0018]
(3)打磨单元作业时高温,内部高压导致偏转油缸液压锁卡滞。产生该问题的原因主要在于:打磨作业时,打磨砂轮在钢轨上高速旋转,磨削钢轨顶面,产生高温花火,导致打磨小车内部温度急剧升高,从而使偏转油缸及内部液压油温度升高。油缸内部被液压锁封闭的液压油在高温下产生膨胀,导致油缸内部液压压强明显增大,从而使液压锁无法开启或出现卡滞现象。同时也使液压油缸、液压锁及油管频繁出现漏油现象。
[0019]
(4)打磨单元偏转抖动大。在对打磨电机进行角度偏转控制时,经常会出现偏转油
缸剧烈振动的现象,使得偏转摇架不能平稳地停在所需角度位置,达不到所需要的打磨效果。尤其是当摇架偏转至较大角度,以及摇架偏转到位停止时会产生较大振动,随着偏转角度继续增加,振幅变大,振动频率加快,剧烈的振动对液压系统和摇架机构产生伤害。产生该问题的原因主要在于:现有打磨单元偏转控制方式并未实现加减速控制,且未考虑偏转角度对输出力的影响。
[0020]
在现有技术中,主要有以下技术方案与本发明相关:
[0021]
现有技术1为本技术人于2017年02月22日申请,并于2017年06月20日公开,公开号为cn106873639a的中国发明申请。该发明申请公开了一种钢轨打磨偏转角度控制方法,钢轨打磨偏转角度控制系统包括偏转电机、下压导柱、打磨电机、偏转摇篮、伸缩油缸、摇架和控制单元。控制单元实时获取当前打磨电机的反馈角度与通过上位机预设的目标角度之间的误差角度,并根据误差角度不断调整偏转电机动作,使打磨电机偏转至预设的目标角度,最终使打磨电机按照预设的目标角度进行打磨作业。该发明能够解决现有轨打磨偏转角度控制方式在打磨过程中打磨角度容易发生变化,导致光带不均匀、打磨轨廓不标准的技术问题。
[0022]
现有技术1基于一定条件(定时、温度变化达到一定值、压力变化达到一定值)对偏转角度进行纠正,通过不断调整偏转电机动作,实时纠正偏转角度,来避免打磨过程中偏转角度的变化,降低了频繁纠正对系统动作灵敏度和响应速度的要求。但其解决的是打磨目标角度不能保持的技术问题,不涉及打磨单元偏转角度的控制问题。同时,该发明申请虽然能从一定程度上动态保持油缸的位置以解决油缸高温油膨胀泄露的问题,但实际上角度很难进行动态控制,不但要求各部件的精度很高,而且容易导致打磨光带不稳定。
[0023]
现有技术2为武汉大学、中铁第四勘察设计院集团有限公司、沈阳奥拓福科技股份有限公司于2021年12月31日申请,并于2022年04月26日公开,公开号为cn114395953a的中国发明申请。该发明申请公开了一种便携式高压水射流钢轨打磨入射角标定方法及系统,采用加速度计和陀螺仪来采集加速度原始数据和角速度原始数据,结合两种传感器的灵敏度求得三轴加速度数据和三轴角速度数据,然后通过定义求得加速度计的惯性力矢量,求出该矢量与各轴之间的第一组夹角数据,为降低打磨作业中机械振动和噪声的影响,将受外界振动影响较小的陀螺仪得到的三轴角速度数据作为第二组夹角数据,将两组数据采用一阶互补算法得到精确值,即给两组数据赋值不同的权重进行修正,最终确定入射角度,将两种传感器的劣势互补,解决了水射流钢轨打磨入射角标定时易受机械振动和噪声影响带来误差的问题。
[0024]
现有技术2利用两种新型传感器(加速度计和陀螺仪)性能互补的特性进行打磨角度标定控制,标定后打磨角度固定不变,同时打磨作业过程中各水射流的偏转角度无法控制,且其解决的是机械振动对传统倾角仪的影响问题,是标定所用传感器的技术问题,而不涉及到打磨单元偏转角度标定的技术问题。
技术实现要素:
[0025]
有鉴于此,本发明的目的在于提供一种打磨单元偏转控制装置、系统及钢轨打磨车,以解决现有打磨单元偏转控制方式由于打磨单元加工组装及结构弹性变形等原因容易引起误差,进而导致偏转角度控制精度低的技术问题。
[0026]
为了实现上述发明目的,本发明具体提供了一种打磨单元偏转控制装置的技术实现方案,打磨单元偏转控制装置,包括:
[0027]
偏转控制单元,在打磨车停车状态下控制打磨单元偏转,并完成偏转角度标定;
[0028]
数据获取单元,在标定过程中采集多组打磨单元实际偏转角度值,及对应的执行机构行程反馈值;
[0029]
数据拟合单元,采用设定的函数拟合,根据打磨单元实际偏转角度值及对应的执行机构行程反馈值的多组数据组合得到函数的参数,将函数的参数传输至偏转控制单元;
[0030]
偏转控制单元在打磨车作业状态下采用设定的函数及所述数据拟合单元传输的参数对打磨单元进行偏转控制。
[0031]
进一步的,所述设定的函数包括但不限于指数函数、傅里叶级数、正弦函数、多项式函数中的任一种。
[0032]
进一步的,所述装置还包括自动标定控制单元,所述自动标定控制单元与偏转控制单元、数据获取单元及数据拟合单元分别相连。所述自动标定控制单元用于,在偏转角度标定状态下,通过设置需要偏转的打磨单元序号、偏转角度间隔、偏转角度范围及偏转电压范围,实现所述偏转控制单元对打磨单元的偏转角度标定控制。在打磨车作业状态下,所述数据获取单元及数据拟合单元不工作,由所述偏转控制单元实现打磨单元作业偏转动作的控制。
[0033]
本发明还另外具体提供了一种钢轨打磨车的技术实现方案,包括:如上所述的打磨单元偏转控制装置。
[0034]
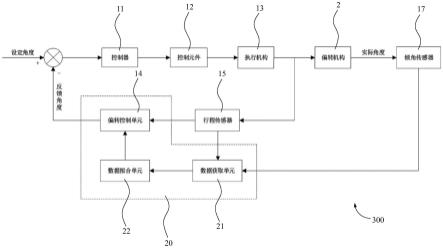
本发明还另外具体提供了一种打磨单元偏转控制系统的技术实现方案,打磨单元偏转控制系统,包括:控制器、控制元件、执行机构、偏转机构、行程传感器,及如上所述的偏转控制装置。在打磨作业过程中,所述控制器根据设定角度值与反馈角度值之间的偏差向控制元件发出控制指令,由所述控制元件控制执行机构动作,再由所述执行机构驱动偏转机构执行偏转动作。在偏转过程中,所述行程传感器实时检测执行机构的行程位移量,所述偏转控制单元根据设定的函数及参数将行程传感器的电压或电流值转换为反馈角度值并输出至控制器,使得所述偏转机构准确偏转至设定角度值。
[0035]
进一步的,所述设定的函数采用以下两项指数函数进行拟合:
[0036]
α=f(v)=a*xp(b*)+*exp(d*v)
[0037]
其中,a、b、c、d为指数函数中的参数,exp为以自然常数e为底的指数函数,α为打磨单元偏转的反馈角度值,v为行程传感器的电压值。
[0038]
本发明还具体提供了另一种打磨单元偏转控制系统的技术实现方案,打磨单元偏转控制系统,包括:控制器、控制元件、执行机构、偏转机构、行程传感器,及如上所述的偏转控制装置。在打磨作业过程中,所述偏转控制单元根据设定的函数及参数将设定角度值转换为目标电压或电流值,所述控制器根据目标电压或电流值与反馈值之间的偏差向控制元件发出控制指令,由所述控制元件控制执行机构动作,再由所述执行机构驱动偏转机构执行偏转动作。在偏转过程中,所述行程传感器实时检测执行机构的行程位移量,并将行程电压或电流反馈值输出至控制器,使得所述偏转机构准确偏转至设定角度值。
[0039]
进一步的,所述设定的函数采用以下傅里叶级数一次展开函数进行拟合:
[0040]
v=f(α)=0+1*os(α*ω)+1*sin(α*ω)
[0041]
其中,a0、a1、b1、ω为傅里叶级数中的参数,v为行程传感器的目标电压值,α为打磨单元偏转的设定角度值。
[0042]
进一步的,在偏转角度标定状态下,所述数据获取单元采集打磨单元实际偏转角度值及执行机构行程反馈值过程中,所述打磨单元的打磨头按照正常打磨作业状态的平均下压力下压至钢轨的轨面上。
[0043]
进一步的,在偏转角度标定状态下,所述偏转控制单元首先根据拟合函数的理论参数进行打磨单元偏转控制,将打磨单元偏转至设置的最大角度。再根据设置的角度间隔朝向另一侧偏转,偏转角度到位则自动停止并将打磨头按照正常作业时的平均下压力下压至钢轨的轨面上,所述数据获取单元自动采集打磨单元实际偏转角度值及执行机构行程反馈值,重复执行该操作直至打磨单元偏转至另一侧的最大设置角度时停止,打磨头按照正常作业时的平均下压力下压至钢轨的轨面上,所述数据获取单元自动采集打磨单元实际偏转角度值及执行机构行程反馈值,完成所有标定点的数据采集。所有采集的数据输入数据拟合单元中进行拟合,得到新的函数拟合参数,并将该参数输出至偏转控制单元替换原有的控制参数,完成控制参数校准。
[0044]
进一步的,所述偏转控制单元利用替换后的控制参数在打磨车停车状态下控制打磨单元偏转,测试所述打磨单元的理论偏转角度值与实际偏转角度值的误差,并判断是否存在误差大于设定角度误差值。若所述偏转控制单元判断误差大于设定角度误差值,则减小目标角度、电压或电流值的容差控制范围,或所述数据拟合单元重新根据打磨单元实际偏转角度值及执行机构行程反馈值进行函数拟合。
[0045]
进一步的,所述系统还包括偏转角度标定子系统,所述偏转角度标定子系统包括在打磨车停车状态下,安装于偏转机构、下压导柱或导套上的倾角传感器。所述打磨单元在打磨车停车状态下,从最内侧角度至最外侧角度或从最外侧角度至最内侧角度偏转一次,同时通过倾角传感器获取打磨单元实际偏转角度值,并通过行程传感器获取对应的执行机构行程反馈值。
[0046]
进一步的,所述倾角传感器通过磁力底座固定在偏转机构的安装平面上。
[0047]
进一步的,所述倾角传感器固定在安装座上,所述安装座再通过磁力底座固定于下压导柱或导套的外侧面。
[0048]
进一步的,所述倾角传感器能实现双轴采集,所述偏转控制单元基于倾角传感器的双轴采集数据,并根据以下公式计算打磨单元在x方向的倾角α:
[0049][0050]
其中,x
′
、y
′
分别为倾角传感器的双轴传感信号输出值,sin-1
为反正弦函数。
[0051]
进一步的,所述倾角传感器带有无线节点,所述偏转角度标定子系统还包括无线网关。所述无线网关接收倾角传感器的倾角数据作为打磨单元实际偏转角度值,并通过网口输出至所述偏转控制单元。
[0052]
进一步的,当打磨头在设定的角度下进行连续打磨作业时,在设定角度值的基础上每间隔设定的时间施加若干次设定幅值的微动偏转动作,以实现角度点动微调及执行机构内部高温超压泄流。
[0053]
进一步的,所述控制元件包括比例换向阀及液压锁,所述执行机构采用液压油缸。所述液压锁的两个出油口分别连接所述液压油缸有杆腔和无杆腔的进油口,两个进油口分
别连接所述比例换向阀的出油口。通过控制器对比例换向阀的压力或流量进行加减速控制,实现液压油缸的运动速度控制。在所述执行机构启动的加速阶段,控制所述比例换向阀的开度由小到大。在即将达到设定角度值时的减速阶段,控制所述比例换向阀的开度由大到小。在角度点动微调阶段,根据所述打磨单元的倾斜角度设置比例换向阀的开度。
[0054]
本发明还另外具体提供了一种钢轨打磨车的技术实现方案,包括:如上所述的打磨单元偏转控制系统。
[0055]
通过实施上述本发明提供的打磨单元偏转控制装置、系统及钢轨打磨车的技术方案,具有如下有益效果:
[0056]
(1)本发明打磨单元偏转控制装置、系统及钢轨打磨车,通过采集打磨单元偏转角度及执行机构行程实际反馈数据并进行函数拟合,能够有效避免因为打磨单元加工组装及结构弹性变形等原因容易带来的误差,提高打磨单元偏转角度控制精度;
[0057]
(2)本发明打磨单元偏转控制装置、系统及钢轨打磨车,通过对打磨单元偏转角度进行定点分段标定,能够提高标定效率,减少人工标定误差,同时通过倾角传感器双轴数据采集可以进一步简化操作,提升标定效率与精度;
[0058]
(3)本发明打磨单元偏转控制装置、系统及钢轨打磨车,通过采用打磨单元偏转角度点动微调实现偏转油缸泄压,能够保证打磨作业过程中的偏转角度精度保持不变,并避免偏转油缸出现卡滞、漏油等现象;
[0059]
(4)本发明打磨单元偏转控制装置、系统及钢轨打磨车,通过对打磨单元偏转过程中进行加减速控制,同时关联角度以控制输出力,能够减少偏转过程中的抖动,降低偏转抖动对偏转机构结构、偏转电缸或偏转油缸的伤害;
[0060]
(5)本发明打磨单元偏转控制装置、系统及钢轨打磨车,在打磨单元偏转角度标定过程中,打磨头按照正常作业时的平均下压力下压至钢轨的轨面上,考虑了打磨单元结构弹性变形的影响,将静态标定改为半动态标定,进一步提高了偏转角度的控制精度。
附图说明
[0061]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的实施例。
[0062]
图1是应用于本发明的一种打磨单元的结构示意图;
[0063]
图2是采用现有偏转控制方式的偏转单元实测角度与理论角度偏差的对比示意图;
[0064]
图3是现有技术中一种打磨单元的偏转机构的结构示意图;
[0065]
图4是现有技术中另一种打磨单元的偏转机构的结构示意图;
[0066]
图5是现有技术中打磨单元的偏转过程示意图;
[0067]
图6是本发明打磨单元偏转控制装置一种具体实施例的偏转角度控制原理框图;
[0068]
图7是本发明打磨单元偏转控制装置另一种具体实施例的偏转角度控制原理框图;
[0069]
图8是本发明打磨单元偏转控制系统一种具体实施例的原理框图;
[0070]
图9是本发明打磨单元偏转控制系统一种具体实施例的系统结构组成框图;
[0071]
图10是本发明打磨单元偏转控制系统另一种具体实施例的系统结构组成框图;
[0072]
图11是本发明打磨单元偏转控制系统两种具体实施例的角度标定装置安装结构示意图;
[0073]
图12是本发明打磨单元偏转控制系统一种具体实施例的角度标定装置的结构示意图;
[0074]
图13是本发明打磨单元偏转控制系统另一种具体实施例的角度标定装置的结构示意图;
[0075]
图14是本发明打磨单元偏转控制系统一种具体实施例安装结构的原理示意图;
[0076]
图15是本发明打磨单元偏转控制系统一种具体实施例自动标定控制单元的连接结构示意图;
[0077]
图16是本发明打磨单元偏转控制系统一种具体实施例中倾角传感器的摆放结构示意图;
[0078]
图17是本发明打磨单元偏转控制系统一种具体实施例中倾角传感器在另一视角下的摆放结构示意图;
[0079]
图18是本发明打磨单元偏转控制系统一种具体实施例中打磨单元在x方向的倾角计算原理示意图;
[0080]
图19是本发明打磨单元偏转控制系统一种具体实施例的偏转角度微动控制波形示意图;
[0081]
图20是本发明打磨单元偏转控制系统一种具体实施例的偏转减速控制机构结构原理图;
[0082]
图21是基于本发明装置及系统的打磨单元偏转控制方法一种具体实施例的程序流程图;
[0083]
图22是基于本发明装置及系统的打磨单元偏转控制方法一种具体实施例函数拟合过程的程序流程图;
[0084]
图23是基于本发明装置及系统的打磨单元偏转控制方法一种具体实施例实测数据采集的界面示意图;
[0085]
图24是基于本发明装置及系统的打磨单元偏转控制方法一种具体实施例根据实测数据进行曲线拟合的界面示意图;
[0086]
图中:1-打磨电机,2-偏转机构,3-打磨头,4-下压导柱,5-下压导套,6-连接架,7-下压驱动机构,8-偏转驱动机构,9-摆动驱动机构,10-连接臂板,11-控制器,12-控制元件,13-执行机构,14-偏转控制单元,15-行程传感器,16-磁力底座,17-倾角传感器,18-无线网关,19-打磨作业控制系统,20-偏转控制装置,21-数据获取单元,22-数据拟合单元,23-安装座,24-自动标定控制单元,100-打磨单元,121-比例换向阀,122-液压锁,200-钢轨,300-偏转控制系统。
具体实施方式
[0087]
为了引用和清楚起见,将下文中使用的技术名词、简写或缩写记载如下:
[0088]
函数拟合:又称为曲线拟合,是指采用连续曲线近似地刻画或比拟平面上离散点
组所表示的坐标之间的函数关系的一种数据处理方法。拟合就是将平面上一系列的点,用一条光滑的曲线连接起来,因为这条曲线有无数种可能,从而有各种拟合方法。拟合的曲线一般可以用函数表示,根据这个函数的不同有不同的拟合名称,这就是拟合函数。
[0089]
sumof:正弦曲线逼近的简称。
[0090]
pid控制器:proportion integration differentiation,比例-积分-微分控制器的简称。
[0091]
pi控制器:proportion integration,比例-积分控制器的简称。
[0092]
pd控制器:proportion differentiation,比例-微分控制器的简称。
[0093]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0094]
如附图1至附图24所示,给出了本发明打磨单元偏转控制装置、系统及钢轨打磨车的具体实施例,下面结合附图和具体实施例对本发明作进一步说明。
[0095]
实施例1
[0096]
如附图9和附图10所示,一种本发明打磨单元偏转控制装置的实施例,具体包括:
[0097]
偏转控制单元14,在打磨车停车状态下控制打磨单元100偏转,并完成偏转角度标定;
[0098]
数据获取单元21,在标定过程中采集多组打磨单元实际偏转角度值,及对应的执行机构行程反馈值;
[0099]
数据拟合单元22,采用设定的函数拟合,根据打磨单元实际偏转角度值及对应的执行机构行程反馈值的多组数据组合得到函数的参数,将函数的参数传输至偏转控制单元14;
[0100]
偏转控制单元14在打磨车作业状态下采用设定的函数及数据拟合单元22传输的参数对打磨单元100进行偏转控制。
[0101]
其中,设定的函数包括但不限于指数函数、傅里叶级数、正弦函数、多项式函数中的任一种。执行机构行程反馈值的输出方式包括但不限于:电压、电阻、电流、增量脉冲及绝对脉冲等多种类型中的任一种。
[0102]
为了充分解决现有打磨单元偏转目标角度计算方式存在的由于打磨单元加工组装及结构弹性变形等原因容易引起误差,进而导致偏转角度控制精度低的技术问题,本发明实施例1描述的偏转控制装置20具体采用基于实测数据的指数函数拟合算法,例如:设定的函数可以进一步采用以下指数函数进行拟合:
[0103]
α=f(v)=a*exp(b*v)+c*exp(d*v)+
……
[0104]
其中,a、b、c、d为指数函数中的参数,exp为以自然常数e为底的指数函数,α为打磨单元100偏转的反馈角度值,执行机构行程反馈值的输出方式采用电压型,v为行程传感器15的电压值,
……
代表更多项数的指数函数。通过实测打磨单元偏转角度与偏转油缸反馈电压的数据关系,得出指数函数的a、b、c、d等参数。
[0105]
当然,设定的函数还可以采用但不限于以下算法。
[0106]
傅里叶级数拟合:
[0107]
α=f(v)=a0+a1*cos(v*ω)+b1*sin(v*ω)+
……
[0108]
其中,a0、s1、b1、ω为算法函数中的参数,v为行程传感器15的电压值,α为打磨单元100偏转的反馈角度值,
……
代表更高次的傅里叶级数展开项。
[0109]
正弦逼近拟合sum of sin:
[0110]
α=f(v)=a1*sin(b1*v+c1)+a2*sin(b2*v+c2)+
……
[0111]
其中,a1、a2、b1、b2、c1、c2为算法函数中的参数,v为行程传感器15的电压值,α为打磨单元100偏转的反馈角度值,
……
代表更多项数的正弦函数。
[0112]
上述算法函数的输入变量为电压值v,输出变量为角度值α,应用于如附图6所示的偏转控制正向算法。对应地,也可以采用如附图7所示的偏转控制反向算法,此时输入变量为角度值α,输出变量为电压值v。如:以傅里叶级数拟合为例,相应的函数变为:
[0113]
v=f(α)=a0+a1*cos(α*ω)+b1*sin(α*ω)+
……
[0114]
其中,a0、a1、b1、ω为算法函数中的参数,v为行程传感器15的目标电压值,α为打磨单元100偏转的设定角度值,
……
代表更高次的傅里叶级数展开项。当采用其他的算法函数实现偏转控制反向算法时,也采用类似的变化将电压变量v与角度变量α的位置互换即可。
[0115]
函数(曲线)拟合的具体过程是:数据拟合单元22根据打磨单元实际偏转角度值,及其对应的执行机构行程反馈值的多组数据组合,并利用设定的函数进行拟合,然后返回拟合得到的参数。数据拟合单元22根据不同的打磨单元实际偏转角度值及对应的执行机构行程反馈值的数据组合进行拟合,得到综合误差最小的拟合参数,并将偏转控制单元14的控制参数替换为该拟合参数。作为一种典型的具体实施例,打磨单元实际偏转角度值α、执行机构行程反馈值v两列数据组合在数据拟合单元22中根据拟合算法进行拟合,然后返回拟合得到的参数。在进行拟合之前需要多组数据,如:采集10~20组数据,或者更多组的数据,数据组合越多拟合结果越准确。拟合的过程是综合考虑所有的位置点,得到综合误差最小的参数a、b、c、d(以两项指数函数拟合为例)。将该打磨单元100的偏转控制算法内的参数保持替代为拟合后的新参数。为了提高拟合的精度,最好在整个角度范围内尽可能均匀地采集多组数据,角度采集的起止点可以选取在最大角附近或最小角附近,例如:内侧70
°
的偏转角度范围,最内侧可以取65
°
为最后一个数据采集点。
[0116]
从理论上说进行拟合的算法函数次数越高(项数越多)拟合精度越高,但考虑到次数越高(项数越多)参数也随之增多,随之带来的运算量增大,对于其他算法亦是如此。因此,经过实际结构误差验证,综合考虑拟合精度满足
±
0.5
°
偏转角度的误差范围要求,以及算法计算的速度,采用两项指数函数、傅里叶级数一次展开函数分别实现偏转控制正向算法(如附图9所示)及反向算法(如附图10所示)中的函数拟合是较佳的方案。
[0117]
如附图15所示,偏转控制装置20还包括自动标定控制单元24,自动标定控制单元24与偏转控制单元14、数据获取单元21及数据拟合单元22分别相连。自动标定控制单元24用于,在偏转角度标定状态下,通过设置需要偏转的打磨单元序号、偏转角度间隔、偏转角度范围及偏转电压范围,实现偏转控制单元14对打磨单元100的偏转角度标定控制。在打磨车作业状态下,数据获取单元21及数据拟合单元22不工作,由偏转控制单元14实现打磨单元100作业偏转动作的控制。
[0118]
实施例1描述的打磨单元偏转控制装置采用自动标定、自动拟合方式,通过控制打
磨单元100的不断偏转实现数据的采集,然后自动对数据进行分析计算,基于设定的函数关系,通过对实际检测的行程传感器电压与标定倾角(通过倾角传感器17获取)的数据进行曲线拟合,从而得出最优的控制参数,并对原有控制参数进行修正,以此来修正因打磨单元100的加工组装误差及结构弹性变形等带来的偏差,能够有效保证打磨单元偏转控制精度及打磨偏转角度标定效率。经过实测,打磨单元偏转控制装置通过采用实施例1描述的技术方案,对打磨电机偏转角度的控制精度能够达到
±
0.2
°
~
±
0.3
°
,可以很好地满足铁路标准对打磨电机偏转角度
±
0.5
°
的控制精度要求。
[0119]
实施例2
[0120]
打磨单元100的角度偏转控制原理为:在打磨过程中,为了保证偏转机构2(又被称为打磨单元架、摇架、摇篮等)能够精确地偏转至所设定的目标角度值,需要控制器11、控制元件12、执行机构13(在本实施例中,更具体地说是偏转驱动机构8,偏转驱动机构8又可以进一步采用偏转油缸或偏转电缸)及行程传感器15(油缸或电缸行程传感器)的互相配合。其中,控制器11作为整个偏转控制系统300的核心,是控制指令的发出者,执行机构13在接收到指令后按照一定规律动作,使偏转机构2偏转,在偏转过程中,由偏转油缸或偏转电缸内的行程传感器15实时检测油缸或者电缸的位移量。如附图6和附图9所示,在本实施例中偏转控制单元14采用偏转控制正向算法,该控制算法是将行程传感器15的电压或电流信号转换成偏转机构2的反馈角度值并输出至控制器11,这样就形成了一个闭环控制系统,以实现对打磨单元100偏转角度的精确控制。
[0121]
如附图6和附图9所示,一种本发明打磨单元偏转控制系统的实施例,具体包括:控制器11、控制元件12、执行机构13、偏转机构2、行程传感器15,及如实施例1所述的偏转控制装置20。在打磨作业过程中,控制器11根据设定角度值(又称为目标角度值)与反馈角度值之间的偏差向控制元件12发出控制指令,由控制元件12控制执行机构13动作,再由执行机构13驱动偏转机构2执行偏转操作。在偏转过程中,行程传感器15实时检测执行机构13的行程位移量,偏转控制单元14根据设定的函数及参数将行程传感器15的电压或电流值转换为反馈角度值并输出至控制器11,使得偏转机构2准确偏转至设定角度值。其中,控制器11可以具体采用pid控制器、pi控制器、pd控制器等。
[0122]
为了充分解决现有打磨单元偏转角度控制方式存在由于打磨单元加工组装及结构弹性变形等原因容易引起误差,进而导致偏转角度控制精度低的技术问题,本实施例具体采用了综合实测拟合效果较佳的指数函数拟合实现偏转控制正向算法,例如:该设定的函数可以进一步采用以两项指数函数进行拟合:
[0123]
α=f(v)=a*xp(b*)+*exp(d*v)
[0124]
其中,a、b、c、d为指数函数中的参数,exp为以自然常数e为底的指数函数,α为打磨单元100偏转的反馈角度值,v为行程传感器15的电压值。
[0125]
当然,上述偏转控制正向算法设定的函数除了采用两项指数函数,还可以采用更多项数的指数函数或其他算法函数进行拟合。
[0126]
在偏转角度标定状态下,数据获取单元22采集打磨单元实际偏转角度值及执行机构行程反馈值(如在本实施例中采用偏转油缸反馈电压)过程中,打磨单元100的打磨头3按照正常打磨作业状态的平均下压力(打磨过程中的下压力并不是一个固定值,而是实时变动的,因为钢轨200的表面存在波纹,打磨单元100会产生振动,导致需要实时调整下压力才
能稳定打磨功率,平均下压力即是指在动态波动的下压力基础上取一个均值进行静态下压,再进行标定角度的测量)下压至钢轨200的轨面上,以解决传统方法中加工制造间隙及结构弹性变形的影响。
[0127]
在偏转角度标定状态(此时打磨车处于停车状态)下,偏转控制单元14首先根据拟合函数的理论参数进行打磨单元100偏转控制,将打磨单元100偏转至设置的最大角度。再根据设置的角度间隔(也可以采用设置时间间隔的方式进行偏转角度标定,角度间隔控制方式更易于实现和满足控制精度的要求)朝向另一侧偏转,偏转角度到位则自动停止并将打磨头3按照正常作业时的平均下压力下压至钢轨200的轨面上,数据获取单元21自动采集打磨单元实际偏转角度值及执行机构行程反馈值,重复执行该操作直至打磨单元100偏转至另一侧的最大设置角度时停止,打磨头3按照正常作业时的平均下压力下压至钢轨200的轨面上,数据获取单元21自动采集打磨单元实际偏转角度值及执行机构行程反馈值,完成所有标定点的数据采集。所有采集的数据输入数据拟合单元22中进行拟合,得到新的函数拟合参数,并将该参数输出至偏转控制单元14替换原有的控制参数,完成控制参数校准。
[0128]
偏转控制单元14利用替换后的控制参数在打磨车停车状态下控制打磨单元100偏转,测试打磨单元100的理论偏转角度值(根据设定的拟合函数及替换后的控制参数进行计算)与实际偏转角度值的误差,并判断是否存在误差大于设定角度误差值。若偏转控制单元14判断误差大于设定角度误差值,则减小目标角度、电压或电流值的容差控制范围,或数据拟合单元22重新根据打磨单元实际偏转角度值及执行机构行程反馈值进行函数拟合。
[0129]
偏转控制系统300还包括偏转角度标定子系统,偏转角度标定子系统包括在打磨车停车状态下,安装于偏转机构2、下压导柱4或下压导套5上的倾角传感器17。倾角传感器17在结束偏转角度标定后,进行正常打磨作业前需要从安装位置拆卸下来。打磨单元100在打磨车停车状态下,从最内侧角度至最外侧角度或从最外侧角度至最内侧角度偏转一次,同时通过倾角传感器17获取打磨单元实际偏转角度值α,并通过行程传感器15获取对应的执行机构行程反馈电压值v。
[0130]
偏转角度标定过程中的打磨单元偏转角度控制可以采用多种方式,例如:执行机构13(可以具体采用偏转油缸或偏转电缸)每伸出一定长度记录一次数据,一直到完全伸出,可以通过油缸的行程进行控制;也可以转换为打磨单元100的偏转角度,每隔设定角度记录一次数据;也可以是每隔设定时间记录一次数据;还可以打磨单元100连续不停地偏转,在偏转过程中自动记录足够多的数据。在数据采集过程中的打磨单元偏转控制过程可以具体采用但不限于:偏转
→
停顿
→
下压
→
采集;或下压
→
连续偏转并采集;或下压
→
偏转
→
停顿
→
采集等方式。
[0131]
如附图11所示,仅为倾角传感器17分别在偏转机构2及下压导柱4(或下压导套5)上的安装位置示意,而并非是两个倾角传感器17同时安装在偏转机构2及下压导柱4(或下压导套5)上。如附图12及附图14所示,倾角传感器17通过磁力底座16吸附固定在偏转机构2的安装平面上。或可以采用倾角传感器17固定在安装座23上,安装座23再通过磁力底座16吸附固定于下压导柱4或下压导套5的外侧面,如附图13所示。同时,倾角传感器17带有无线节点,偏转角度标定子系统还包括无线网关18,如附图8所示。无线网关18接收倾角传感器17的倾角数据作为打磨单元实际偏转角度值,并通过网口输出至偏转控制单元14,偏转控制单元14作为打磨作业控制系统19的一部分。
[0132]
打磨单元100的偏转角度标定子系统主要用于提高打磨作业(偏转)角度控制精度及标定效率,通过自动控制打磨单元100执行断续的偏转动作,进行不同角度下的偏转油缸电压信号及倾角传感器偏转角度信号的采集。本实施例描述的偏转控制系统300能够实现无线采集、自动标定、参数拟合及结果验证等功能。
[0133]
如附图17所示,β为指人工摆放过程中产生的操作误差,由于β的存在导致x
′
与x不在同一个方向。在本实施例中,倾角传感器17能实现双轴数据采集,通过计算可以纠正安装定位误差对倾角的测量影响。如附图16至附图18所示,偏转控制单元14基于倾角传感器17的双轴采集数据,并进一步根据以下公式计算打磨单元100在x方向的倾角α:
[0134][0135]
其中,x
′
、y
′
分别为倾角传感器17的双轴传感信号输出值,sin-1
为反正弦函数。附图16中,h为水平方向。
[0136]
偏转角度标定子系统具备无线数据采集功能,标定用的倾角传感器17采用无线传感器,可以实现长距离数据无线传输,无需布线,使用方便。同时,倾角传感器17带有磁力底座16,可以快速自动固定在被测的偏转机构2(即打磨单元架)上,使用更加便捷。
[0137]
当打磨头3在设定的角度下进行连续打磨作业时,在设定角度值的基础上每间隔设定的时间施加若干次设定幅值的微动偏转动作,以实现角度点动微调(即连续多次小幅值的脉动式调节)及执行机构内部高温超压泄流,如附图19所示。如附图20所示,控制元件12进一步包括比例换向阀121及液压锁122,执行机构13采用液压油缸。液压锁122的两个出油口分别连接液压油缸有杆腔和无杆腔的进油口,两个进油口分别连接比例换向阀121的出油口。
[0138]
作为本发明一种典型的具体实施例,在打磨作业过程中,如:设定打磨偏转角度为35
°
,则每间隔60s进行两次幅值为
±
0.5
°
的微小偏转动作,该动作可以使偏转油缸(即偏转驱动机构8)内部因温升而升高的液压压力降低,排出一定的液压油,从而避免偏转油缸内部的液压压力持续升高,进而避免产生液压锁122的无法开启、卡滞、漏油等问题。其中,设定的打磨偏转角度35
°
,该角度也可以为打磨单元100作业过程中所有可能使用到的打磨角度,该角度可以为在-35
°
(负值代表向外侧偏转)至70
°
(正值代表向内侧偏转)之间的任何角度,对于一些车型甚至可以是-45
°
至75
°
范围。此外,偏转
±
0.5
°
的微小动作也可以是
±1°
或
[0139]
±2°
,一般是较小的角度,以免对钢轨打磨的角度产生较大影响。而对于打磨角度偏转的间隔时间60s,可以是5分钟调整一次,或是10分钟,甚至是20分钟调整一次。
[0140]
如附图20中虚线框部分所示为液压锁122,液压锁122实质上由两个液控单向阀组成,通过液控单向阀可以将回路锁住,回路油液不能流动,以保证液压油缸(即执行机构13)即使在外界具有一定载荷的情况下仍能保持其位置静止不动。液压锁122的作用是互锁,即当附图20中的比例换向阀121位于中位时,液压油缸在两个液控单向阀的作用下左右油缸处于静止状态。但是当比例换向阀121处于右位时,b口进油,此时右路液控单向阀进油,同时控制油路将左路液控单向阀打开泄油。当比例换向阀121处于左位时同理。
[0141]
在本实施例中,比例换向阀121具体采用三位换向阀,三位换向阀具有三个通油位置,分别是左位、中位及右位。同时,比例换向阀121具有四个接油管的接口,分别是p、t、a、b口。左位是指阀芯处于左边位置时,右位是指阀芯处于右边位置时,中位是指当液压执行元
件停止时的位置,左位和右位是液压执行元件工作时的位置。中位也是液压阀的常态位置,在中位上,四个油口p、t、a、b所表现出的功能就是中位机能。比例换向阀121在比例电磁铁的作用下,阀芯不仅可以换位,而且换位的行程可以连续或者按比例变化,既可以控制油缸的运动方向,也可以控制油缸的运动速度。其中,p口接压力油,t口连接回油箱,a、b口连接液压锁122的进油口或回油口。
[0142]
为了解决打磨单元100偏转振动的问题,通过控制器11对比例换向阀121的压力或流量进行加减速控制,实现液压油缸的运动速度控制。在执行机构13启动的加速阶段,控制比例换向阀121的开度由小到大。在即将达到设定角度值时的减速阶段,控制比例换向阀121的开度由大到小。这样可以最大限度地避免打磨单元偏转过程中的剧烈振动,大大降低了对打磨液压系统(即比例换向阀121及液压锁122)及偏转机构2(即摇架)的伤害。在角度点动微调阶段,根据打磨单元100的倾斜角度设置比例换向阀121的开度。比例换向阀121的p口压力一般为10mpa,即比例换向阀121的最大压力输出一般为10mpa,最小压力输出为0。但是考虑到打磨单元100偏转大角度时的重力影响,最小输出压力应大于打磨单元100的重力偏载带来的压力,而重力偏载压力与偏转角度有关。例如:当打磨单元100处于0
°
左右位置时,最小输出压力可以是比0稍大一些的压力,当偏转角度为60
°
~70
°
左右时,最小压力则需要7mpa左右才能抵消打磨单元100重力带来的倾倒趋势。
[0143]
需要特别说明的是,在本实施例中,仅以执行机构13采用偏转油缸(即偏转驱动机构8)一级偏转结构的打磨单元100为例进行介绍。当执行机构13采用摆动油缸(即摆动驱动机构9)+偏转电缸(即偏转驱动机构8)两级偏转结构的打磨单元100时,可以采用分段标定的方法,即先控制摆动驱动机构9动作使打磨单元100偏转至设定角度,在此基础上再分段控制偏转驱动机构8动作使打磨单元100偏转至标定角度。如:先控制摆动驱动机构9动作使打磨单元100偏转至0
°
,假设偏转驱动机构8伸出时标定内侧70
°
至0
°
,偏转驱动机构8收缩时标定0
°
至外侧35
°
,分成两段进行标定即可,具体的标定分开角度可以是0
°
,也可以是-35
°
~70
°
之间的其他任意角度。
[0144]
本实施例描述的偏转控制系统300具有自动标定、自动拟合与结果自检功能,能够有效保证打磨单元偏转控制精度及打磨偏转角度标定效率。打磨作业计算机(即打磨作业控制系统19)中设置有标定控制软件,通过控制打磨单元100的不断偏转实现数据的采集,然后自动对数据进行分析计算,得出最优的控制参数,并对原有控制参数进行修正。本实施例基于偏转油缸内部行程传感器数据与偏转角度的对应关系,通过对实际检测的行程传感器电压与标定倾角(通过倾角传感器17获取)的关系进行曲线拟合,以此来修正因打磨单元100的加工组装误差及结构弹性变形等带来的偏差。
[0145]
实施例3
[0146]
如附图7和附图10所示,另一种本发明打磨单元偏转控制系统的实施例,具体包括:控制器11、控制元件12、执行机构13(在本实施例中,更具体地说是偏转驱动机构8,偏转驱动机构8又可以进一步采用偏转油缸或偏转电缸)、偏转机构2、行程传感器15,及如实施例1所述的偏转控制装置20。在打磨作业过程中,偏转控制单元14根据设定的函数及参数将设定角度值转换为目标电压或电流值,控制器11根据目标电压或电流值与反馈值之间的偏差向控制元件12发出控制指令,由控制元件12控制执行机构13动作,再由执行机构13驱动偏转机构2执行偏转动作。在偏转过程中,行程传感器15实时检测执行机构13的行程位移
量,并将行程电压或电流反馈值输出至控制器11,使得偏转机构2准确偏转至设定角度值。如附图7和附图10所示,在本实施例中偏转控制单元14采用偏转控制反向算法,该控制算法是将偏转机构2的设定角度值转换成行程传感器15的目标电压或电流信号并输出至控制器11,这样就形成了一个闭环控制系统,以实现对打磨单元100偏转角度的精确控制。
[0147]
本实施例采取了综合实测拟合效果较佳的傅里叶级数拟合实现偏转控制反向算法,例如:该设定的函数可以进一步采用以下傅里叶级数一次展开函数进行拟合:
[0148]
v=f(α)=0+1*os(α*ω)+1*sin(α*ω)
[0149]
其中,a0、a1、b1、ω为傅里叶级数中的参数,v为行程传感器15的目标电压值,α为打磨单元100偏转的设定角度值。
[0150]
当然,上述偏转控制反向算法设定的函数除了采用傅里叶级数一次展开函数,还可以采用更高展开次数的傅里叶级数或其他算法函数进行拟合。
[0151]
实施例3与实施例2的区别在于偏转控制单元14具体采用偏转控制反向算法,因此偏转控制系统300的具体结构方面有所区别(如附图9和附图10所示),其余部分更加详细的技术方案可以具体参照实施例2中的相关描述,在此不再赘述。
[0152]
实施例4
[0153]
如附图21所示,一种应用于实施例1及实施例2的打磨单元偏转控制方法的实施例,具体包括以下步骤:
[0154]
s11)在打磨车停车状态下控制打磨单元偏转,在偏转过程中采集多组打磨单元实际偏转角度值,及对应的执行机构行程反馈值;
[0155]
s12)采用设定的函数拟合,根据打磨单元实际偏转角度值及对应的执行机构行程反馈值的多组数据组合得到函数的参数,并返回拟合得到的新参数;
[0156]
s13)将打磨单元100偏转控制的函数参数替换为拟合得到的新参数;
[0157]
s16)在打磨车作业状态下根据设定的函数及拟合得到的新参数对打磨单元100进行偏转控制。
[0158]
在步骤s13)与步骤s16)之间进一步包括:
[0159]
s14)利用替换后的控制参数在打磨车停车状态下控制打磨单元100偏转,测试打磨单元100的理论偏转角度值与实际偏转角度值的误差,并判断是否存在误差大于设定角度误差值;
[0160]
s15)若判断误差大于设定角度误差值,则减小目标角度、电压或电流值的容差控制范围,或重新根据打磨单元实际偏转角度值及执行机构行程反馈值进行函数拟合。
[0161]
在步骤s11)之前还包括步骤s10):
[0162]
s10)在打磨车停车状态下,将倾角传感器17安装于偏转机构2、下压导柱4或下压导套5上。
[0163]
重复上述步骤s10)~步骤s15),对其他多组打磨单元100进行标定。
[0164]
其中,函数拟合过程的程序流程具体包括数据采集、数据处理、参数拟合及检查修正四个步骤,如附图22所示。数据处理流程主要包括对异常采集数据的处理或剔除,数据单位的转换,以及对连续采集的数据进行处理,综合得到代表性的数据等操作。设定的函数包括但不限于指数函数、傅里叶级数、正弦函数、多项式函数中的任一种。
[0165]
上述步骤s14)~步骤s15)利用新的算法参数测试该打磨单元100的理论计算角度
与实际检测角度之间的误差,判断是否存在偏转角度误差大于
±
0.5
°
的现象。如果打磨单元偏转角度较大时存在角度误差超过
±
0.5
°
的现象,则可以考虑将控制目标电压或电流的容差区域减小,或者对该段曲线拟合参数重新进行修正。例如:将打磨单元100偏转的目标角度值设定为30
°
,在控制打磨电机1偏转的同时计算反馈角度值与设定(目标)角度值之间的偏差,如果偏差小于0.5
°
的容差时,即代表打磨电机1偏转到位可以结束偏转动作。如果存在角度误差超过
±
0.5
°
时,为了提高控制精度,可以将容差从0.5
°
修改为0.3
°
,也就是当反馈角度在29.7
°
~30.3
°
范围内时,才会结束控制。
[0166]
当偏转控制单元14采用偏转控制正向算法时,步骤s16)进一步包括以下步骤:
[0167]
控制器11根据设定角度值与反馈角度值之间的偏差向控制元件12发出控制指令,由控制元件12控制执行机构13(在本实施例中,更具体地说是偏转驱动机构8,偏转驱动机构8又可以进一步采用偏转油缸或偏转电缸)动作,再由执行机构13驱动偏转机构2执行偏转动作。在偏转过程中,行程传感器15实时检测执行机构13的行程位移量,偏转控制单元14根据设定的函数及参数将行程传感器15的电压或电流值转换为反馈角度值并输出至控制器11,使得偏转机构2准确偏转至设定角度值。
[0168]
设定的函数可以进一步采用以下两项指数函数进行拟合:
[0169]
α=f(v)=a*xp(b*)+*exp(d*v)
[0170]
其中,a、b、c、d为指数函数中的参数,exp为以自然常数e为底的指数函数,α为打磨单元100偏转的反馈角度值,v为行程传感器15的电压值。
[0171]
当偏转控制单元14采用偏转控制反向算法时,步骤s16)进一步包括以下步骤:
[0172]
偏转控制单元14根据设定的函数及参数将设定角度值转换为目标电压或电流值,控制器11根据目标电压或电流值与反馈值之间的偏差向控制元件12发出控制指令,由控制元件12控制执行机构13动作,再由执行机构13驱动偏转机构2执行偏转动作。在偏转过程中,行程传感器15实时检测执行机构13的行程位移量,并将行程电压或电流反馈值输出至控制器11,使得偏转机构2准确偏转至设定角度值。
[0173]
设定的函数可以进一步采用以下傅里叶级数一次展开函数进行拟合:
[0174]
v=f(α)=0+1*os(α*ω)+1*sin(α*ω)
[0175]
其中,a0、a1、b1、ω为傅里叶级数中的参数,v为行程传感器15的目标电压值,α为打磨单元100偏转的设定角度值。
[0176]
如附图23所示为打磨单元偏转控制方法实测数据采集的界面示意图,如附图24所示为根据前述实测数据进行曲线拟合的界面示意图,图中纵坐标代表行程电压(单位为v),横坐标代表偏转角度(单位为
°
)。其中,实测曲线即实际曲线,反映打磨单元实际偏转角度与行程传感器电压之间的关系。理论曲线即指偏转控制系统300设计时,按照设计尺寸对应的关系曲线,而未考虑加工制造误差以及重力变形等因素带来的误差。
[0177]
步骤s11)进一步包括:
[0178]
在偏转角度标定状态下,采集打磨单元实际偏转角度值及执行机构行程反馈值过程中,打磨单元100的打磨头3按照正常打磨作业状态的平均下压力下压至钢轨200的轨面上。同时,在进行偏转角度(自动)标定之前,在显示器上进入偏转自动标定程序,设置相关参数:选择需要偏转的打磨单元序号、偏转角度间隔、偏转角度范围及偏转电压范围等。当执行自动标定程序时,在偏转角度标定状态下,通过设置好的需要偏转的打磨单元序号、偏
转角度间隔、偏转角度范围及偏转电压范围,实现对打磨单元100的偏转角度标定控制。在步骤s16)中,打磨车作业状态下,由偏转控制单元14实现打磨单元100作业偏转动作的控制。
[0179]
在步骤s11)中,偏转角度标定状态下,偏转控制单元14首先根据拟合函数的理论参数进行打磨单元100的偏转控制,将打磨单元100偏转至设置的最大角度。再根据设置的角度间隔朝向另一侧偏转,偏转角度到位则自动停止并将打磨头2按照正常作业时的平均下压力下压至钢轨200的轨面上,自动采集打磨单元实际偏转角度值及执行机构行程反馈值,重复执行该步骤直到打磨单元100偏转至另一侧的最大设置角度时停止,将打磨头3按照正常作业时的平均下压力下压至钢轨200的轨面上,自动采集打磨单元实际偏转角度值及执行机构行程反馈值,完成所有标定点的数据采集。通过执行步骤s12)将所有采集的数据进行拟合,得到新的函数拟合参数,并通过执行步骤s13)将该参数输出至偏转控制单元14替换原有的控制参数,完成控制参数校准。此时,拟合函数的理论参数即完全按照打磨单元100的设计尺寸,并根据a、o、b的三角关系(即a、b、l0)对应的角度和电压数据,拟合到算法函数的参数即理论函数参数,在此情况下不考虑加工结构误差和变形等因素的影响。拟合曲线即是根据实际的实测曲线进行拟合,而没有考虑理论曲线。在没有得到实测曲线之前,可以对理论曲线进行拟合得到初步的参数a、b、c、d(以两项指数函数拟合为例),有了初步的参数a、b、c、d,偏转控制单元14的对应控制算法就可以粗略地控制打磨单元执行偏转动作和角度标定,然后再通过实测曲线进行拟合及修正参数a、b、c、d。
[0180]
步骤s11)还进一步包括:
[0181]
打磨单元100在打磨车停车状态下,从最内侧角度至最外侧角度或从最外侧角度至最内侧角度偏转一次,同时通过倾角传感器17获取打磨单元实际偏转角度值,并通过行程传感器15获取对应的执行机构行程反馈值。通过改变偏转时间间隔设置或根据理论算法函数参考设定角度间隔,可改变标定点个数。通过改变偏转角度范围可改变打磨电机1的标定范围,改善小范围角度标定的精度。时间间隔及偏转角度等参数的设置可满足多种定制化标定需求,以更好地满足作业现场的不同应用要求。
[0182]
在步骤s11)的偏转角度标定过程中,进一步通过无线网关18接收倾角传感器17的倾角数据作为打磨单元实际偏转角度值,并通过网口输出至偏转控制单元14。同时,为了纠正安装定位误差对倾角测量的影响,进而提升打磨单元偏转角度控制精度,步骤s11)进一步包括:
[0183]
通过倾角传感器17进行双轴数据采集,偏转控制单元14基于倾角传感器17的双轴采集数据,并根据以下公式计算打磨单元100在x方向的倾角α:
[0184][0185]
其中,x
′
、y
′
分别为倾角传感器17的双轴传感信号输出值,sin-1
为反正弦函数。如附图16和附图17所示,为双轴倾角传感器安装示意图,h为水平方向,通过如附图18所示两个方向的倾角矢量合并计算,可纠正安装定位误差对倾角测量的影响。
[0186]
在步骤s10)中,进一步将倾角传感器17通过磁力底座16固定在偏转机构2的安装平面上;或将倾角传感器17固定在安装座23上,再将安装座23通过磁力底座16固定于下压导柱4或下压导套5的外侧面。
[0187]
由于打磨车的打磨单元数量较多,标定工作需要针对每个打磨单元100逐个进行,
因此倾角传感器17需要在各个打磨单元100之间频繁转移,操作安装工作量大,且需要预留安装接口,甚至手持固定。为了解决该技术问题,如附图16和附图17所示的倾角传感器17带有磁力底座16,通过磁力底座16可以快速自动地固定在被测的打磨单元架(即偏转机构2)上,使用操作非常便捷。磁力底座16具有两种结构形式:一种是以打磨单元架上某一平面为基准的标定安装方式,另一种为以下压导柱4或下压导套5为基准的标定安装方式。其中,第一种磁力底座16的安装面为平面定位结构,第二种磁力底座16的安装面则带有v型槽定位结构。
[0188]
在打磨作业时,打磨头3在钢轨200上高速旋转,磨削钢轨200的顶面,产生高温花火,容易导致打磨小车内部温度急剧升高,从而使得偏转油缸(即偏转驱动机构8)及内部液压油温度升高。油缸内部被液压锁封闭的液压油在高温下产生膨胀,将会导致油缸内部液压压强明显增大,从而使液压锁122出现无法开启或卡滞的现象。同时,也会使液压油缸、液压锁122及油管频繁出现漏油现象。为了解决该技术问题,本实施例采用微动控制措施,即当打磨头3在设定的角度下进行连续打磨作业时,每间隔一定的时间,进行一次微小的偏转动作。作为本实施例的进一步改进,步骤s16)还包括:
[0189]
当打磨头3在设定的角度下进行连续打磨作业时,在设定角度值的基础上每间隔设定的时间施加若干次设定幅值的微动偏转动作,以实现角度点动微调及偏转油缸内部高温超压泄流。
[0190]
控制元件12进一步包括比例换向阀121及液压锁122,执行机构13进一步采用液压油缸。将液压锁122的两个出油口分别连接液压油缸有杆腔和无杆腔的进油口,将两个进油口分别连接比例换向阀121的出油口。为了解决打磨单元偏转振动的技术问题,作为本实施例的进一步改进,步骤s16)还包括:
[0191]
在打磨作业过程中,通过控制器11对比例换向阀121的压力或流量进行加减速控制,实现液压油缸的运动速度控制。在执行机构13启动的加速阶段,控制比例换向阀121的开度由小到大。在即将达到设定角度值时的减速阶段,控制比例换向阀121的开度由大到小。在角度点动微调阶段,根据打磨单元100的倾斜角度设置比例换向阀121的开度。
[0192]
在本发明上述实施例2-4中,以执行机构13采用偏转油缸(即偏转驱动机构8)一级偏转结构的打磨单元100为例进行介绍,当执行机构13采用摆动油缸(即摆动驱动机构9)+偏转电缸(即偏转驱动机构8)两级偏转的打磨单元100时,可以采用分段标定的方法,即先控制摆动驱动机构9动作使打磨单元100偏转至设定角度,在此基础上再分段控制偏转驱动机构8动作使打磨单元100偏转至标定角度。此外,本发明实施例描述的偏转控制装置、系统及方法可应用于多级偏转结构,偏转控制系统300中所涉及的偏转油缸同样可以采用偏转电缸(电动推杆)替代。偏转调速控制结构中的比例调速阀121也可以采用节流阀、伺服阀等具有一定调速功能的液压阀。虽然偏转控制算法中的偏转控制正向算法以指数函数拟合为例,偏转控制反向算法以傅里叶级数拟合为例分别进行了说明,但也可以采用其他基于实测数据的拟合函数形式。偏转角度标定子系统采用基于实测数据的自动角度标定方式,可以采用无线数据传输形式,也可以采用有线数据传输形式。
[0193]
根据实际应用测试结果,无论是采用指数函数、傅里叶级数,还是采用正弦函数或多项式函数拟合,拟合精度均能控制在
±
0.2
°
~
±
0.3
°
的误差范围内,在进一步提高函数的拟合次数之后甚至可以达到
±
0.2
°
以内,很好地满足了打磨单元
±
0.5
°
的偏转角度误差
范围要求。
[0194]
实施例5
[0195]
一种本发明钢轨打磨车的实施例,具体包括:如实施例1所述的打磨单元偏转控制装置20,偏转控制装置20作为打磨作业控制系统19的一部分安装于钢轨打磨车上。
[0196]
实施例6
[0197]
另一种本发明钢轨打磨车的实施例,具体包括:如实施例2或实施例3所述的打磨单元偏转控制系统300。
[0198]
在本技术的描述中,需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上,它可以直接在另一个元件上或者间接设置在另一个元件上;当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至另一个元件上。
[0199]
需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0200]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”、“若干个”的含义是两个或两个以上,除非另有明确具体的限定。
[0201]
专业人员还可以进一步意识到,结合本发明具体实施例中所公开的实施例描述的各示例的单元及步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。至于这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
[0202]
结合本文中所公开的实施例描述的方法或算法可以直接采用硬件、处理器执行的软件模块,或者二者的结合来实施。软件模块可以置于随机存储器(ram)、内存、只读存储器(rom)、电可编程rom、电可擦除可编程rom、各种可编程逻辑器件、寄存器、硬盘、可移动磁盘、cd-rom、或本技术领域内所公知的任意其它形式的存储介质中。执行软件模块的处理器可以是中央处理器(cpu)、嵌入式处理器、微控制器(mcu)、数字信号处理器(dsp)、单片机、片上系统(soc)、可编程逻辑器件,以及本技术领域内所公知的任意其它形式具有控制、处理功能的器件。
[0203]
须知,本说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本技术可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本技术所能产生的功效及所能达成的目的下,均应仍落在本技术所揭示的技术内容能够涵盖的范围内。
[0204]
通过实施本发明具体实施例描述的打磨单元偏转控制装置、系统及钢轨打磨车的技术方案,能够产生如下技术效果:
[0205]
(1)本发明具体实施例描述的打磨单元偏转控制装置、系统及钢轨打磨车,通过采集打磨单元偏转角度及执行机构行程实际反馈数据并进行函数拟合,能够有效避免因为打磨单元加工组装及结构弹性变形等原因容易带来的误差,提高打磨单元偏转角度控制精度;
[0206]
(2)本发明具体实施例描述的打磨单元偏转控制装置、系统及钢轨打磨车,通过对打磨单元偏转角度进行定点分段标定,能够提高标定效率,减少人工标定误差,同时通过倾角传感器双轴数据采集可以进一步简化操作,提升标定效率与精度;
[0207]
(3)本发明具体实施例描述的打磨单元偏转控制装置、系统及钢轨打磨车,通过采用打磨单元偏转角度点动微调实现偏转油缸泄压,能够保证打磨作业过程中的偏转角度精度保持不变,并避免偏转油缸出现卡滞、漏油等现象;
[0208]
(4)本发明具体实施例描述的打磨单元偏转控制装置、系统及钢轨打磨车,通过对打磨单元偏转过程中进行加减速控制,同时关联角度以控制输出力,能够减少偏转过程中的抖动,降低偏转抖动对偏转机构结构、偏转电缸或偏转油缸的伤害;
[0209]
(5)本发明具体实施例描述的打磨单元偏转控制装置、系统及钢轨打磨车,在打磨单元偏转角度标定过程中,打磨头按照正常作业时的平均下压力下压至钢轨的轨面上,考虑了打磨单元结构弹性变形的影响,将静态标定改为半动态标定,进一步提高了偏转角度的控制精度。
[0210]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其它实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0211]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明的精神实质和技术方案的情况下,都可利用上述揭示的方法和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同替换、等效变化及修饰,均仍属于本发明技术方案保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1