一种实现绕线电机多级转子串电阻无触点级联控制和故障监测的系统及方法与流程
1.本发明是涉及一种实现绕线电机多级转子串电阻无触点级联控制和故障监测的系统及方法,属于绕线电机控制技术领域。
背景技术:
2.转子串电阻,通常称之为“切电阻”,即:利用对绕线电机转子回路电阻值进行改变来实现电机的调速。由于采用转子串电阻方式进行启动,既可限制启动电流又可增大启动转矩,因此常用于启动困难的机械中,适用于重载和频繁启动的工业机械上(如:起重机、升降机等)。
3.为了在整个启动过程中能得到比较大的加速转矩,并使启动过程平滑,启动电阻通常被分成几段,必须在启动过程中逐级切除。
4.目前,实现转子串电阻控制主要有两种方式,一种是电磁式交流接触器控制,一种是无触点接触器控制。因电磁式交流接触器控制存在诸多缺陷,例如:1)在使用时存在功率损耗,且线圈运行时有噪音产生,尤其在衔铁有污物时噪音更大;2)在负载电流较大时容易将触点烧住以至于触点不能够及时释放;3)当主电子触点带载释放时,容易产生电弧打火,使触点烧蚀,造成接触不良,严重的可造成电源缺相,烧毁电机线圈;4)在频繁开关的应用场合,很容易损坏;5)使用寿命短,控制线圈耗能多,功率大时更明显;因此,随着电力电子技术的发展,以晶闸管作为开关的无触点接触器已在代替电磁式接触器。
5.虽然无触点接触器控制方式具有无火花、不存在触点粘连,寿命长,成本低等优点,但是将其应用于转子多级串电阻控制时,如果没有严重短路,从外观很难识别实现无触点控制的晶闸管是否发生故障,如果实现无触点控制的几个晶闸管中有一个发生故障,将会造成绕线电机的三相转子电阻阻值不相同,从而会影响电机出力,但这种影响只有在电机负载接近额定负载时才会比较明显,以致增加了无触点控制故障查找的难度,存在安全隐患和事故风险。
6.另外,目前用于绕线电机转子多级串电阻控制的多个无触点接触器之间为独立控制,相互之间没有产生关联控制,以致在上级切电阻工作时,下级切电阻仍在多余工作,以致造成冗余切电阻工作,产生不必要的能耗和影响工作效率,且会影响无触点接触器的使用寿命。
技术实现要素:
7.针对现有技术存在的上述问题和需求,本发明的目的是提供一种实现绕线电机多级转子串电阻无触点级联控制和故障监测的系统及方法,以对绕线电机多级转子串电阻实现无触点控制的同时,还能实现多级之间的级联控制和各级无触点控制故障的监测,使绕线电机多级转子串电阻能实现精准智能控制,达到节约能耗、延长寿命、提高工作效率和电机运行的安全性及稳定性目的。
8.为实现上述发明目的,本发明采用的技术方案如下:
9.一种实现绕线电机多级转子串电阻无触点级联控制和故障监测的系统,所述绕线电机的三相转子电阻均设有n段,相邻两段之间均设有一个无触点控制器,每个无触点控制器均设有u、v、w三相导通信号输出端和级联信号输入端及本级转子串电阻控制信号输入端;其中:最上级无触点控制器的级联信号输入端与制动信号相串接,最上级无触点控制器的本级转子串电阻控制信号与制动信号并联后与次上级无触点控制器的级联信号输入端相串接,次上级无触点控制器的级联信号和次上级转子串电阻控制信号并联后与其下一级的无触点控制器的级联信号输入端相串接;依此类推,由上至下,上一级无触点控制器的级联信号和上一级转子串电阻控制信号并联后与其下一级的无触点控制器的级联信号输入端相串接;且所述n为≥2的自然数。
10.一种优选方案,所述n为3~7的自然数。
11.一种实施方案,每个无触点控制器均包括输入输出控制电路、级联检测电路、转子频率检测电路、晶闸管开关电路和晶闸管驱动模块,所述级联检测电路的信号输入端与制动信号和前级转子串电阻的控制信号的并联信号相连,所述级联检测电路的信号输出端与输入输出控制电路的级联信号输入端相连,并且,所述输入输出控制电路还设有与本级转子串电阻控制信号相连的输入端,所述转子频率检测电路的信号输入端与转子频率信号相连,所述转子频率检测电路的信号输出端与输入输出控制电路的转子频率信号输入端相连,所述输入输出控制电路的信号输出端与晶闸管开关电路的信号输入端相连,所述晶闸管开关电路的信号输出端与晶闸管驱动模块的信号输入端相连,所述晶闸管驱动模块的信号输出端与转子电阻器相连。
12.一种实施方案,所述输入输出控制电路是由2个非门、1个三输入与非门、1个二输入或门、1个异或门构成的数字逻辑电路,其中:输入的级联信号和输入的转子频率信号分别经过一非门处理后与输入的本级转子串电阻控制信号一起经过三输入与非门逻辑处理后,向晶闸管开关电路输出开关信号;并且,输入的本级转子串电阻控制信号与输入的转子频率信号一起经过异或门处理后与输入的级联信号再经过二输入或门逻辑处理后,向晶闸管故障指示灯输出开关信号。
13.一种实施方案,所述级联检测电路是由整流电路、降压电路、稳压保护电路、滤波电路、放电保护电路、光电隔离电路和信号整形放大电路组成。
14.一种实施方案,所述转子频率检测电路是将转子频率脉冲信号转为电平信号,当有转子频率时为高电平,当无转子频率时为低电平。
15.一种实施方案,所述晶闸管开关电路是由开关电路组成,以将dc5v输出转成dc24v开关输出信号,以驱动晶闸管驱动模块运行。
16.一种实施方案,所述晶闸管驱动模块设有与转子电阻器相连接的晶闸管导通信号输出铜排。
17.一种优选方案,所述晶闸管驱动模块是由2只mtc-100a晶闸管模块集成得到。
18.一种实现绕线电机多级转子串电阻无触点级联控制和故障监测的方法,包括如下步骤:
19.s1)各个无触点控制器分别根据各自所检测的制动信号和前级转子串电阻的控制信号,判断本级为允许运行还是禁止运行;若检测到制动信号为开且前级转子串电阻的控
制信号为关时,则判断本级为允许运行,否则判断为禁止运行;
20.s2)若判断本级当前为允许运行,且本级转子串电阻控制信号为开,同时检测到有转子频率信号时,则判断用于本级无触点控制的晶闸管存在开路故障;若判断本级当前为允许运行,且本级转子串电阻控制信号为关,同时检测到无转子频率信号时,则判断用于本级无触点控制的晶闸管存在短路故障;
21.s3)若判断本级当前为禁止运行,则不进行晶闸管故障检测。
22.进一步实施方案,仅当本级当前为允许运行,同时本级转子串电阻控制信号为开,且判断用于本级无触点控制的晶闸管无故障时,该级无触点控制器才向转子电阻器输出切本级电阻的导通信号。
23.与现有技术相比,本发明具有如下有益技术效果:
24.本发明创造性地采用制动信号和前级转子串电阻的控制信号作为本级允许或禁止运行的判断前提,不仅实现了多级转子串电阻之间的级联控制,使绕线电机多级转子串电阻能实现精准智能控制,可大幅减少冗余无效工作所造成的多余能耗和对工作效率及使用寿命的影响,具有节约能耗,可延长使用寿命和提高工作效率等有益效果,而且还可根据制动信号及前级转子串电阻的控制信号和本级转子串电阻控制信号及转子频率有无进行监测用于无触点控制的晶闸管是否存在故障,可及时精准发现无触点控制故障和提示维护人员进行及时处理,对提高电机运行的安全性和稳定性具有重要价值,可用于对现存治金行业中的起重机设备的电控系统进行升级改造,以使传统起重电机的控制性能和安全性得到最大优化和保障。因此,相对于现有技术,本发明具有显著性进步和很强的工业应用价值。
附图说明
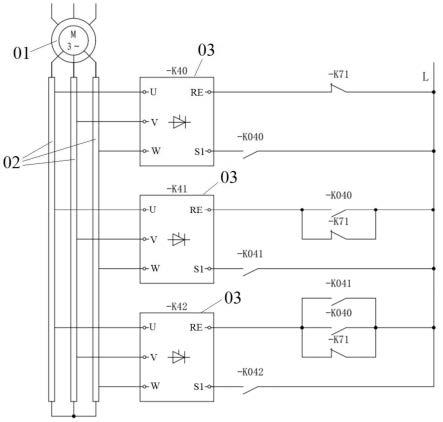
25.图1是本发明实施例提供的一种实现绕线电机多级转子串电阻无触点级联控制和故障监测的系统的电气结构示意图;
26.图2是本发明实施例中所述的无触点控制器的电路原理框图;
27.图3是本发明实施例中所述的输入输出控制电路的具体电路图;
28.图4是本发明实施例中所述的级联检测电路的具体电路图;
29.图5是本发明实施例中所述的转子频率检测电路的具体电路图;
30.图6是本发明实施例中所述的晶闸管开关电路的具体电路图;
31.图7是本发明实施例中所述的无触点控制器的立体结构示意图;
32.图8是图7所示的无触点控制器在去掉金属箱体后的内部结构示意图。
33.图中标号示意如下:01、绕线电机;02、转子电阻;03、无触点控制器;031、输入输出控制电路;031-1、非门;031-2、三输入与非门;031-3、异或门;031-4、二输入或门;032、级联检测电路;032-1、整流电路;032-2、降压电路;032-3、稳压保护电路;032-4、滤波电路;032-5、放电保护电路;032-6、光电隔离电路;032-7、信号整形放大电路;033、转子频率检测电路;034、晶闸管开关电路;035、晶闸管驱动模块;035-1、信号输入端;036、金属箱体;037、集成电路板;038、散热器;039、散热风扇;0310、驱动信号端子;04、转子电阻器;05、晶闸管导通信号输出铜排。
具体实施方式
34.以下结合附图和实施例对本发明的技术方案做进一步详细描述。
35.实施例
36.请参阅图1所示:本实施例提供的一种实现绕线电机多级转子串电阻无触点级联控制和故障监测的系统,所述绕线电机01的三相转子电阻02均设有n段(图1以4段示例,但不限于此设计,所述n为≥2的自然数,优选为3~7的自然数),相邻两段之间均设有一个无触点控制器03(如图1中的k40、k41和k42),每个无触点控制器03均设有u、v、w三相导通信号输出端(如图1中的u、v、w端)和级联信号输入端(如图1中的re端)及本级转子串电阻控制信号输入端(如图1中的s1端);其中:最上级无触点控制器(如图1中的k40)的级联信号输入端(re端)与制动信号(如图1中的k71)相串接,最上级无触点控制器(如图1中的k40)的本级转子串电阻控制信号(如图1中的k040)与制动信号(如图1中的k71)并联后与次上级无触点控制器(如图1中的k41)的级联信号输入端(re端)相串接,次上级无触点控制器(如图1中的k41)的级联信号(k71与k040的并联信号)和次上级转子串电阻控制信号(如图1中的k041)并联后与其下一级的无触点控制器(如图1中的k42)的级联信号输入端(re端)相串接;依此类推,由上至下,上一级无触点控制器的级联信号和上一级转子串电阻控制信号并联后与其下一级的无触点控制器的级联信号输入端相串接。
37.请结合图1所示,本发明所述的实现绕线电机多级转子串电阻无触点级联控制和故障监测的方法,包括如下步骤:
38.s1)各个无触点控制器(如图1中的k40、k41和k42)分别根据各自所检测的制动信号(如图1中的k71)和前级转子串电阻的控制信号(如图1中,k42的前级转子串电阻的控制信号是指k040和k041,k41的前级转子串电阻的控制信号是指k040,最上级k40无前级),判断本级为允许运行还是禁止运行;若检测到制动信号为开且前级转子串电阻的控制信号为关时,则判断本级为允许运行,否则判断为禁止运行;例如:图1中k40的允许运行条件为k71开(接通),k41的允许运行条件为k71开(接通)且其前级转子串电阻的控制信号k040为关(断开),k42的允许运行条件为k71开(接通)且其前级转子串电阻的控制信号k040和k041均为关(断开);
39.s2)若判断本级当前为允许运行,且本级转子串电阻控制信号(如:图1中k40的本级转子串电阻控制信号为k040,k41的本级转子串电阻控制信号为k041,k42的本级转子串电阻控制信号为k042)为开,同时检测到有转子频率信号(如:检测的转子频率信号为高电平)时,则判断用于本级无触点控制的晶闸管存在开路故障;若判断本级当前为允许运行,且本级转子串电阻控制信号为关,同时检测到无转子频率信号(如:检测的转子频率信号为低电平)时,则判断用于本级无触点控制的晶闸管存在短路故障;
40.s3)若判断本级当前为禁止运行,则不进行晶闸管故障检测。
41.进一步实施方案,仅当本级当前为允许运行,同时本级转子串电阻控制信号为开,且判断用于本级无触点控制的晶闸管无故障时,该级无触点控制器才向转子电阻器输出切本级电阻的导通信号。
42.由上所述可见:本发明通过创造性地采用制动信号和前级转子串电阻的控制信号作为本级允许或禁止运行的判断前提,不仅实现了多级转子串电阻之间的级联控制,使绕线电机多级转子串电阻能实现精准智能控制,可大幅减少冗余无效工作所造成的多余能耗
和对工作效率及使用寿命的影响,具有节约能耗,可延长使用寿命和提高工作效率等有益效果,而且还可根据制动信号及前级转子串电阻的控制信号和本级转子串电阻控制信号及转子频率有无监测用于无触点控制的晶闸管是否存在故障,可及时精准发现无触点控制故障和提示维护人员进行及时处理,对提高电机运行的安全性和稳定性具有重要价值。
43.图2是本发明实施例所提供的一种无触点控制器的电路原理框图,由图2所示可见:所述的无触点控制器03包括输入输出控制电路031、级联检测电路032、转子频率检测电路033、晶闸管开关电路034和晶闸管驱动模块035,所述级联检测电路032的信号输入端与制动信号和前级转子串电阻的控制信号的并联信号相连,所述级联检测电路032的信号输出端与输入输出控制电路031的级联信号输入端相连,并且,所述输入输出控制电路031还设有与本级转子串电阻控制信号相连的输入端,所述转子频率检测电路033的信号输入端与转子频率信号相连,所述转子频率检测电路033的信号输出端与输入输出控制电路031的转子频率信号输入端相连,所述输入输出控制电路031的信号输出端与晶闸管开关电路034的信号输入端相连,所述晶闸管开关电路034的信号输出端与晶闸管驱动模块035的信号输入端相连,所述晶闸管驱动模块035的信号输出端与转子电阻器04相连。
44.图3是本发明实施例所提供的输入输出控制电路031的一种具体电路图,由图3所示可见:所述输入输出控制电路031是由2个非门031-1、1个三输入与非门031-2、1个异或门031-3和1个二输入或门031-4构成的数字逻辑电路,其中:输入的级联信号(如图3中左侧的ac_limit1信号)和输入的转子频率信号(如图3中左侧的mot_in1信号)分别经过一非门031-1处理后与输入的本级转子串电阻控制信号(如图3中左侧的control信号)一起经过三输入与非门031-2逻辑处理后,向晶闸管开关电路输出开关信号(如图3中右侧的run_out1信号);并且,输入的本级转子串电阻控制信号(如图3中左侧的control信号)与输入的转子频率信号(如图3中左侧的mot_in1信号)一起经过异或门031-3处理后与输入的级联信号(如图3中左侧的ac_limit1信号)再经过二输入或门031-4逻辑处理后,向晶闸管故障指示灯(如图3中右侧的fault_led)输出开关信号。
45.图4是本发明实施例所提供的级联检测电路032的一种具体电路图,由图4所示可见:所述级联检测电路032是由整流电路032-1、降压电路032-2、稳压保护电路032-3、滤波电路032-4、放电保护电路032-5、光电隔离电路032-6和信号整形放大电路032-7组成,制动信号和前级转子串电阻的控制信号的并联信号由图4左侧的re输入,经处理后的级联信号由图4右侧的ac_limit1输送给输入输出控制电路031(请结合图3所示)。
46.所述转子频率检测电路033是将转子频率脉冲信号转为电平信号,当有转子频率时为高电平,当无转子频率时为低电平;此检测电路为现有技术,具体可采用图5所示的具体电路结构,转子频率信号是由图5所示电路左侧的fb1、fb2输入,经过整流、降压、滤波、光电隔离和整形放大后,由右侧的mot_in1输送给输入输出控制电路031(请结合图3所示)。
47.所述晶闸管开关电路034是由开关电路组成,是将dc5v输出转成dc24v开关输出信号,以驱动晶闸管驱动模块035运行;此电路为现有技术,具体可采用图6所示的具体电路结构。
48.请再结合图7和图8所示,本发明所述的无触点控制器03还包括金属箱体036,所述的输入输出控制电路031、级联检测电路032、转子频率检测电路033、晶闸管开关电路034和晶闸管驱动模块035均集成安装在该金属箱体036内,并且,所述的输入输出控制电路031、
级联检测电路032、转子频率检测电路033和晶闸管开关电路034均集成在一集成电路板037上,所述晶闸管驱动模块035设有与转子电阻器04(图中未示出)相连接的晶闸管导通信号输出铜排05。
49.所述晶闸管驱动模块035可由2只mtc-100a晶闸管模块集成得到。
50.另外,本发明所述的无触点控制器03还包括散热器038和散热风扇039,以实现更好的散热效果,以利于延长所述的无触点控制器的使用寿命;在集成电路板037上还设有与晶闸管驱动模块035的信号输入端035-1信号连接的驱动信号端子0310。
51.本发明所述的无触点控制器的工作原理如下:
52.当制动信号为开(即检测有电)且前级转子串电阻的控制信号为关(即检测无电)时,级联检测电路032输出允许运行信号(低电平),否则输出禁止运行信号(高电平);
53.当输入输出控制电路031采集到级联检测电路032输出的为允许运行信号(低电平),且输入的本级转子串电阻控制信号(如图3中左侧的control信号)为开(即检测有电)时,则向晶闸管开关电路034输出进入运行状态,否则输出进入待机状态;
54.当输入输出控制电路031采集到级联检测电路032输出的为允许运行信号(低电平),且输入的本级转子串电阻控制信号(如图3中左侧的control信号)为开(即检测有电),同时输入的转子频率信号为有(高电平)时,输入输出控制电路031判定为晶闸管开路故障,向图3中晶闸管故障指示灯(如图3中右侧的fault_led)输出开信号,使故障指示灯亮,并停机保护;
55.当输入输出控制电路031采集到级联检测电路032输出的为允许运行信号(低电平),且输入的本级转子串电阻控制信号(如图3中左侧的control信号)为关(即检测无电),同时输入的转子频率信号为无(低电平)时,输入输出控制电路031判定为晶闸管短路故障,向图3中晶闸管故障指示灯(如图3中右侧的fault_led)输出开信号,使故障指示灯亮;
56.当输入输出控制电路031采集到级联检测电路032输出的为禁止运行信号(高电平)时,则不进行晶闸管故障监测;
57.仅当晶闸管开关电路034采集到允许运行信号(低电平),且输入的本级转子串电阻控制信号为开(即检测有电),同时监测到无晶闸管故障时,晶闸管开关电路034才向晶闸管驱动模块035输出导通信号,进行该级转子切电阻。
58.最后有必要在此指出的是:以上所述仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1