一种基于自动逼近型MPPT算法的光伏逆变器控制方法及系统与流程
一种基于自动逼近型mppt算法的光伏逆变器控制方法及系统
技术领域
1.本发明涉及光伏技术领域,尤其涉及一种基于自动逼近型mppt(maximum power point tracking,最大功率点追踪)算法的光伏逆变器控制方法及系统。
背景技术:
2.如图1所示,光伏控制系统都采用pwm模式,通过脉冲宽度调制方法控制功率器件的开关频率f和占空比d来实现对输出功率的控制。图1中,主流控制算法则是控制dc/dc变换器的占空比d来实现,各种不同的mppt算法,最终转化为占空比d的不同计算方法。
3.有数据显示,mppt算法的优劣程度能对光伏电池板的年发电量起到不同比例的作用(如,最优的mppt算法起到20%~25%的提升)。除了经典的扰动观测法和电导增量法外,当前主流mppt算法大多采用近几年才逐步发展起来的解决p-v特性曲线上存在多个局部极大值现象的多峰值mppt算法,但多峰值mppt算法采用的仍是基于比较判断而后进行正/反向调整的机制,其实现过程是先施加控制变量而后获取控制结果,判断结果是否符合预期再进行相应调整和改变的模式。
4.发明人发现,多峰值mppt算法一旦面临环境变化,不光因为分段实现搜索而导致跟踪速度慢,不同的分段标准还会严重影响到结果的准确性,使得光伏逆变器输出功率受到影响。同时,基于比较判断而后进行正/反向调整的机制不能直接根据采样结果自动计算和控制,且在比较判断过程上占据了算法实现的主要环节,尤其是一些算法的比较判断分支多达10余个,既违背代码实现的简洁高效原则,降低了系统的鲁棒性,也使得程序在环境快速变化时无法快速而正确的响应,容易出现误判,影响光伏逆变器输出功率的最大化。
5.因此,有必要对当前mppt算法过程及其机制进行改变,寻找一种不仅能摒弃无休无止的比较判断环节,还能克服跟踪速度和精度的矛盾的新方法,来提升mppt效率和系统输出功率。
技术实现要素:
6.本发明实施例所要解决的技术问题在于,提供一种基于自动逼近型mppt算法的光伏逆变器控制方法,通过一种新的mppt算法来控制逆变器输出功率,不仅摒弃现有mppt算法中无休无止的比较判断环节,还克服跟踪速度和精度的矛盾,具备实现简单、没有过于复杂的运算、稳健性好及鲁棒性好等优点。
7.为了解决上述技术问题,本发明实施例提供了一种基于自动逼近型mppt算法的光伏逆变器控制方法,所述方法包括以下步骤:
8.设置光伏逆变器的启动功率,并根据所述启动功率,计算出pwm功率器件应初始输出的频率和占空比,对所述光伏逆变器进行启动控制;
9.待完成对所述光伏逆变器进行启动控制之后,确定采样周期;
10.获取每一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压和电流,并结合每一采样周期之前一采样周期所采集到的所述光伏组件输入到所述光伏逆变器
的电压和电流以及预设的功率门限值,得到每一采样周期的功率设置值,且进一步根据每一采样周期的功率设置值,计算出pwm功率器件对应输出的频率和占空比,对所述光伏逆变器进行循环控制。
11.其中,所述获取每一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压和电流,并结合每一采样周期之前一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压和电流以及预设的功率门限值,得到每一采样周期的功率设置值,且进一步根据每一采样周期的功率设置值,计算出pwm功率器件对应输出的频率和占空比,对所述光伏逆变器进行循环控制的具体步骤包括:
12.获取当前采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压un和电流in,以及上一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压u
n-1
和电流i
n-1
,通过公式pi=ui×ii
,计算出当前采样周期的实际功率pn和上一采样周期的实际功率p
n-1
;
13.通过公式计算出功率变化率r
p
,并通过公式ru=(u
n-u
n-1
)
×
|u
n-u
n-1
|,计算出基于电压变化平方的有符号值ru;
14.通过公式δs=a
×rp
+b
×ru
,计算出调整因子δs,并通过公式pcn=pc
n-1
+δs,计算出当前采样周期的功率控制因子pcn;其中,a、b均为固定的常量;pc
n-1
为上一采样周期的功率控制因子;
15.通过公式n=int(p
def
/pcn)+1,计算出步长控制因子n;其中,p
def
为所述预设的功率门限值;int函数是对除法结果进行取整;当pcn>p
def
时,n=1;
16.通过公式p
set
=n
×
pcn,计算出当前采样周期的功率设置值p
set
,并根据所述功率设置值p
set
,计算出pwm功率器件对应当前采样周期应输出的频率和占空比,对所述光伏逆变器进行控制。
17.其中,所述方法进一步包括:
18.若当前采样周期所计算的调整因子δs为0,则所述光伏逆变器的当前输出功率对应于光伏组件的当前最大功率点。
19.本发明实施例还提供了一种基于自动逼近型mppt算法的光伏逆变器控制系统,包括:
20.初始启动控制单元,用于设置光伏逆变器的启动功率,并根据所述启动功率,计算出pwm功率器件应初始输出的频率和占空比,对所述光伏逆变器进行启动控制;
21.采样周期确定单元,用于待完成对所述光伏逆变器进行启动控制之后,确定采样周期;
22.迭代控制单元,用于获取每一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压和电流,并结合每一采样周期之前一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压和电流以及预设的功率门限值,得到每一采样周期的功率设置值,且进一步根据每一采样周期的功率设置值,计算出pwm功率器件对应输出的频率和占空比,对所述光伏逆变器进行循环控制。
23.其中,所述迭代控制单元包括:
24.参数获取模块,用于获取当前采样周期所采集到的所述光伏组件输入到所述光伏
逆变器的电压un和电流in,以及上一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压u
n-1
和电流i
n-1
,通过公式pi=ui×ii
,计算出当前采样周期的实际功率pn和上一采样周期的实际功率p
n-1
;
25.功率变化率和电压差平方的有符号值计算模块,用于通过公式计算出功率变化率r
p
,并通过公式ru=(u
n-u
n-1
)
×
|u
n-u
n-1
|,计算出基于电压变化平方的有符号值ru;
26.调整因子及功率控制因子计算模块,用于通过公式δs=a
×rp
+b
×ru
,计算出调整因子δs,并通过公式pcn=pc
n-1
+δs,计算出当前采样周期的功率控制因子pcn;其中,a、b均为固定的常量;pc
n-1
为上一采样周期的功率控制因子;
27.步长控制因子计算模块,用于通过公式n=int(p
def
/pcn)+1,计算出步长控制因子n;其中,p
def
为所述预设的功率门限值;int函数是对除法结果进行取整;当pcn>p
def
时,n=1;
28.迭代控制模块,用于通过公式p
set
=n
×
pcn,计算出当前采样周期的功率设置值p
set
,并根据所述功率设置值p
set
,计算出pwm功率器件对应当前采样周期应输出的频率和占空比,对所述光伏逆变器进行控制。
29.实施本发明实施例,具有如下有益效果:
30.1、本发明对现有mppt算法进行改进,采用完全自动的计算和迭代算法,摒弃了当前mppt算法中无休无止的比较判断环节,并通过将功率变化率r
p
和电压差平方的有符号值ru加权求和作为调整因子,对光伏逆变器的输出功率进行控制,从而可以将功率变化和电压变化这两个相关变量以一个简单的公式融合一体,摒弃了各类比较判断和繁琐的条件转换行为,以最简洁高效的方式,实现了对最大功率点的自动逼近;
31.2、相对于传统算法中使用δp和δu作为比较判断和运算依据,本发明采用电压差平方的有符号值ru,而不是电压差δu,使得功率变化更为快速,mppt算法的追踪速度得到了大幅提升;
32.3、本发明的调整因子δs是功率变化率r
p
和电压差平方的有符号值ru的加权和,这个加权和会自带步长连续调整作用,当位于最大功率点时,δs=0,保证了追踪的精度,不存在最大点处的功率震荡,而当δs《0或δs》0时,功率可快速变化,从而解决了扰动观测法等传统方法里的追踪速度和精度的矛盾;
33.4、本发明的步长控制因子n可以在小功率段时通过n的变化进一步调整追踪的速度和精度的平衡;
34.5、本发明通过变化功率门限值p
def
,可将单峰mppt算法演变为多峰mppt算法,一旦存在多个极值点时采用不同的p
def
,可以快速锁定不同的峰值,并追踪到真正的最大值。
附图说明
35.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
36.图1为现有技术中光伏组件与光伏逆变器间的光伏控制系统的工作原理图;
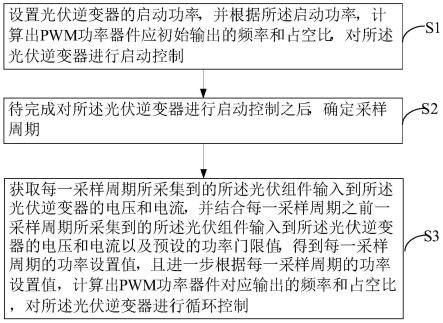
37.图2为本发明实施例提供的一种基于自动逼近型mppt算法的光伏逆变器控制方法的流程图;
38.图3为本发明实施例提供的一种基于自动逼近型mppt算法的光伏逆变器控制方法中步骤s3的流程图;
39.图4为本发明实施例提供的一种基于自动逼近型mppt算法的光伏逆变器控制方法的应用场景中光伏逆变器的p-v曲线图;
40.图5为本发明实施例提供的一种基于自动逼近型mppt算法的光伏逆变器控制方法的应用场景中光伏组件的电池模型和光伏逆变器模型的连接图;
41.图6为本发明实施例提供的一种基于自动逼近型mppt算法的光伏逆变器控制方法的应用场景中35w、100w、350w三峰mppt的模拟曲线图;
42.图7为本发明实施例提供的一种基于自动逼近型mppt算法的光伏逆变器控制系统的结构示意图。
具体实施方式
43.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
44.如图2所示,为本发明实施例中,提供的一种基于自动逼近型mppt算法的光伏逆变器控制方法,所述方法包括以下步骤:
45.步骤s1、设置光伏逆变器的启动功率,并根据所述启动功率,计算出pwm功率器件应初始输出的频率和占空比,对所述光伏逆变器进行启动控制;
46.具体过程为,设置启动功率为p
start
,并根据启动功率p
start
,计算出pwm功率器件应初始输出的频率和占空比,对光伏逆变器进行控制。应当说明的是,pwm功率器件未启动之前,光伏组件输入到光伏逆变器(如dc-dc转换系统)的初始电压u0为开路电压,初始电流i0为0。
47.步骤s2、待完成对所述光伏逆变器进行启动控制之后,确定采样周期;
48.具体过程为,光伏逆变器进行启动控制后,确定采样周期t0,响应速度要求越快的系统,采样周期可设置越短。
49.步骤s3、获取每一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压和电流,并结合每一采样周期之前一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压和电流以及预设的功率门限值,得到每一采样周期的功率设置值,且进一步根据每一采样周期的功率设置值,计算出pwm功率器件对应输出的频率和占空比,对所述光伏逆变器进行循环控制;
50.具体过程为,请参见图3所示,获取当前采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压un和电流in,以及上一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压u
n-1
和电流i
n-1
,通过公式pi=ui×ii
,计算出当前采样周期的实际功率pn和上一采样周期的实际功率p
n-1
;
51.通过公式计算出功率变化率r
p
,并通过公式ru=(u
n-u
n-1
)
×
|u
n-u
n-1
|,计算出基于电压变化平方的有符号值ru;
52.通过公式δs=a
×rp
+b
×ru
,计算出调整因子δs,并通过公式pcn=pc
n-1
+δs,计算出当前采样周期的功率控制因子pcn;其中,a、b均为固定的常量;pc
n-1
为上一采样周期的功率控制因子;
53.通过公式n=int(p
def
/pcn)+1,计算出步长控制因子n;其中,p
def
为所述预设的功率门限值;int函数是对除法结果进行取整;当pcn>p
def
时,n=1;
54.通过公式p
set
=n
×
pcn,计算出当前采样周期的功率设置值p
set
,并根据所述功率设置值p
set
,计算出pwm功率器件对应当前采样周期应输出的频率和占空比,对光伏逆变器进行控制。
55.应当说明的是,当前采样周期所计算的调整因子δs若为0,则光伏逆变器的当前输出功率对应于光伏组件的当前最大功率点。而当δs《0或δs》0时,功率可快速变化,δs越大,变化越快,这保证了追踪的速度。
56.应当说明的是,上述p
start
,p
def
,a,b为常量或变量,可依据具体应用设置或调整。
57.如图4至图6所示,对本发明实施例中的一种基于自动逼近型mppt算法的光伏逆变器控制方法的应用场景作进一步说明,具体如下:
58.如图4所示,因p
start
,p
def
,a,b,n等均为正数,可知系统会主要工作于p-v曲线中v
mp
及其右侧。当功率从0开始增加时,电压从v
oc
开始下降,r
p
和ru的变化趋势相反,此时,r
p
加权的作用大于ru的加权,δs》0,使得此时功率快速上升,直到接近vmp时,r
p
和ru的变化趋缓,且接近于抵消,当v=v
mp
时,δs=0,系统将锁定在最大功率点。
59.如图5所示,为并网型光伏逆变器应用中光伏组件的电池模型和并网逆变器模型的连接图。因为系统输出连接到电网,并网电压和频率依赖于电网电压和频率,是相对稳定的,变化相对平缓。在考虑光伏组件的快速环境变化(光照、温度变化)时,可近似认为电网电压不变,则负载模型为:系统输出功率变大时,输出电流变大,负载变小;系统输出功率变小时,输出电流变小,负载变大。对光伏组件而言,当负载变大时,其输出电压会变高,负载变小时,输出电压则变低。故本发明成立的工作区域与并网型应用是完全相符的。
60.分析其反例,假设可能存在某种状况(依本发明实施时不会存在),因为控制不当,使p-v曲线工作在v
mp
的左半区域,即ru为负(光伏电压降低)时,r
p
也为负(光伏功率降低),则δs会负的越来越多,使功率快速归零,而功率归零,会使得光伏电压回归开路电压v
oc
,重新将系统拉回右半区域工作。
61.在一个实施案例中,输入光伏组件为单块光伏板,输入电压范围为16~60v,并网电压为176~265v,并网频率为50/60hz,并网功率标称值为600w。其中,p
def
=60w,p
start
=7.5w,b=32,a值与功率控制因子n的值有关,当n=1时,a=8,否则a=1。而采样周期设定为并网频率相应的1/2周波。
62.在实施例的实际产品中,静态mppt效率达到了99.9%,动态mppt效率达到99.8%,在标称输出600w功率时,稳定后功率变化《0.5w,而从0到最大工作点的追踪时间小于扰动观测法的十分之一。
63.通过与市场同功率的微逆变器进行为期1个月的实测对比,系统发电量在光照变化缓慢的日子,其发电量相当,而在光照变化剧烈的天气里,系统发电量比其他逆变器高出约6%。
64.在一个存在35w、100w、350w三峰mppt的模拟曲线(如图6所示)中,将p
def
分别设置为30w,60w和120w,p
start
=p
def
/8,即可快速求得不同极值功率大小,并追踪到真正的mppt点350w。
65.如图7所示,为本发明实施例中,提供的一种基于自动逼近型mppt算法的光伏逆变器控制系统,包括:
66.初始启动控制单元110,用于设置光伏逆变器的启动功率,并根据所述启动功率,计算出pwm功率器件应初始输出的频率和占空比,对所述光伏逆变器进行启动控制;
67.采样周期确定单元120,用于待完成对所述光伏逆变器进行启动控制之后,确定采样周期;
68.迭代控制单元130,用于获取每一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压和电流,并结合每一采样周期之前一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压和电流以及预设的功率门限值,得到每一采样周期的功率设置值,且进一步根据每一采样周期的功率设置值,计算出pwm功率器件对应输出的频率和占空比,对所述光伏逆变器进行循环控制。
69.其中,所述迭代控制单元130包括:
70.参数获取模块,用于获取当前采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压un和电流in,以及上一采样周期所采集到的所述光伏组件输入到所述光伏逆变器的电压u
n-1
和电流i
n-1
,通过公式pi=ui×ii
,计算出当前采样周期的实际功率pn和上一采样周期的实际功率p
n-1
;
71.功率变化率和电压差平方的有符号值计算模块,用于通过公式计算出功率变化率r
p
,并通过公式ru=(u
n-u
n-1
)
×
|u
n-u
n-1
|,计算出基于电压变化平方的有符号值ru;
72.调整因子及功率控制因子计算模块,用于通过公式δs=a
×rp
+b
×ru
,计算出调整因子δs,并通过公式pcn=pc
n-1
+δs,计算出当前采样周期的功率控制因子pcn;其中,a、b均为固定的常量;pc
n-1
为上一采样周期的功率控制因子;
73.步长控制因子计算模块,用于通过公式n=int(p
def
/pcn)+1,计算出步长控制因子n;其中,p
def
为所述预设的功率门限值;int函数是对除法结果进行取整;当pcn>p
def
时,n=1;
74.迭代控制模块,用于通过公式p
set
=n
×
pcn,计算出当前采样周期的功率设置值p
set
,并根据所述功率设置值p
set
,计算出pwm功率器件对应当前采样周期应输出的频率和占空比,对所述光伏逆变器进行控制。
75.实施本发明实施例,具有如下有益效果:
76.1、本发明对现有mppt算法进行改进,采用完全自动的计算和迭代算法,摒弃了当前mppt算法中无休无止的比较判断环节,并通过将功率变化率r
p
和电压差平方的有符号值ru加权求和作为调整因子,对光伏逆变器的输出功率进行控制,从而可以将功率变化和电压变化这两个相关变量以一个简单的公式融合一体,摒弃了各类比较判断和繁琐的条件转换行为,以最简洁高效的方式,实现了对最大功率点的自动逼近;
77.2、相对于传统算法中使用δp和δu作为比较判断和运算依据,本发明采用电压差
平方的有符号值ru,而不是电压差δu,使得功率变化更为快速,mppt算法的追踪速度得到了大幅提升;
78.3、本发明的调整因子δs是功率变化率r
p
和电压差平方的有符号值ru的加权和,这个加权和会自带步长连续调整作用,当位于最大功率点时,δs=0,保证了追踪的精度,不存在最大点处的功率震荡,而当δs《0或δs》0时,功率可快速变化,从而解决了扰动观测法等传统方法里的追踪速度和精度的矛盾;
79.4、本发明的步长控制因子n可以在小功率段时通过n的变化进一步调整追踪的速度和精度的平衡;
80.5、本发明通过变化本发明的功率门限值p
def
,可将单峰mppt算法演变为多峰mppt算法,一旦存在多个极值点时采用不同的p
def
,可以快速锁定不同的峰值,并追踪到真正的最大值。
81.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,所述的程序可以存储于一计算机可读取存储介质中,所述的存储介质,如rom/ram、磁盘、光盘等。
82.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1