一种高频模组式飞机地面静变电源装置及其控制方法与流程
1.本发明涉及飞机地面静变电源技术领域,具体涉及一种高频模组式飞机地面静变电源装置及其控制方法。
背景技术:
2.当前飞机地面静变电源拓扑实现方式主要是整流侧多脉冲不控整流居多,请参照图1,具体为十二脉冲移相电抗器实现的十二脉冲整流,隔离变压器或自耦移相变压器实现的12脉冲、18脉冲、24脉冲、36脉冲整流。整流侧使用全控整流的有,但不多,可参照图2或发明cn 110855157 a,整流侧使用了全控整流,逆变侧多数为h桥输出,400hz三相变压器输出,电容滤波。
3.然而,当前的大功率飞机地面静变电源一个模组实现大功率输出,开关管只能使用igbt,开关频率都工作在几khz到十几khz,谐波含量大,整机噪音大,且有一个igbt,如果损坏会导致整机进入瘫痪状态。
技术实现要素:
4.本发明目的是提供一种高频模组式飞机地面静变电源装置及其控制方法,能够在部分模组损坏时自动退出,不影响整机运行。
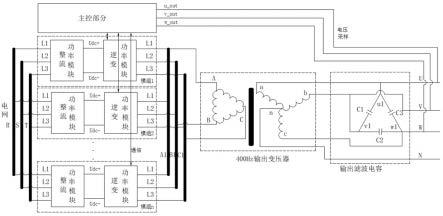
5.本发明为实现上述目的,通过以下技术方案实现:一种高频模组式飞机地面静变电源装置,包括:主控部分,电压采样模块,m个模组,市电输入铜排r、s、t,逆变汇流铜排a1、b1、c1,400hz输出变压器,输出滤波电容;其中,m最大取10;各个模组输入端l1、l2、l3分别与市电输入r、s、t连接,输出端l1’、l2’、l3’分别与逆变汇流铜排a1、b1、c1连接,逆变汇流铜排a1、b1、c1与400hz输出变压器的原边输入端a、b、c连接,400hz输出变压器的副边输出端a、b、c分别与输出滤波电容三个输入端u1、v1、w1连接,且u1、v1、w1为飞机地面静变电源输出端u、v、w,所述400hz输出变压器副边中点n连接到飞机地面静变电源输出端n,飞机地面静变电源输出端u、v、w与电压采样模块相连,电压采样模块分别输出电压采样值u_out、v_out、w_out与主控部分连接;各个模组均包含整流功率模块和逆变功率模块,整流功率模块和逆变功率模块为同一种功率模块。
6.其中功率模块可采用的电路设计为:包括并联连接在直流侧端口udc+、udc-的三个半桥臂和母线电容cdc,每个半桥臂分别包含串联的两个功率器件ta1与ta2、tb1与tb2、tc1与tc2,功率模块是一个双向工作的功率模块,交流侧端口为l1、l2、l3,功率器件ta1与ta2之间对应串接滤波电感la的输入端l1,功率器件tb1与tb2之间对应串接滤波电感lb的输入端l2,功率器件tc1与tc2之间对应串接滤波电感lc的输入端l3,功率器件为开关管和二极管并联。
7.优选的,功率模块内的开关管使用硅 mos、碳化硅mos或氮化镓mos,开关频率100khz以上。
8.优选的,输出滤波电容包括c1、c2、c3三个三角形连接的相同大小的滤波电容。
9.优选的,400hz输出变压器原边三角形连接,副边星形连接,工作频率400hz。
10.优选的,主控部分和逆变功率模块控制部分由fpga或者dsp实现,各模组并联均流输出。
11.本发明还提出一种基于上述静变电源装置的控制方法,包括主控部分和逆变功率模组控制部分,主控部分包括电压解耦部分、电流d轴q轴分量接收与均值计算部分、容错处理部分,逆变功率模块控制部分包括均流控制与电流解耦部分、状态检测与容错报警部分;电压解耦部分包括步骤:进行三相电压给定和三相电压采样abc到αβ、αβ到dq坐标变换,经过电压外环解耦后输出电流d轴给定量ild_ref和电流q轴给定量ilq_ref;电流d轴、q轴分量接收与均值计算部分包括步骤:接收各逆变功率模块发来的电流d轴分量和q轴分量id_1、di_2...id_m,iq_1、iq_2...iq_m,计算所有逆变功率模块的d轴分量和q轴分量平均值id_avg、iq_avg,向各逆变功率模块发送id_avg、iq_avg;容错处理部分包括步骤:接收各逆变功率模块发出的状态异常报警信号,重新计算平均值id_avg、iq_avg,进行容错;均流控制与电流解耦部分包括步骤:进行输出三相电流abc到αβ、αβ到dq坐标变换,向主控部分发送电流d轴和q轴分量id_k和iq_k,接收id_avg和iq_avg并计算均流差值id_avg-id_k和iq_avg-iq_k,将均流差值反馈到电流解耦部分进行均流控制,进行电流解耦,坐标反变换得到三相调制波sina_k、sinb_k、sinc_k,调制波与载波比较后输出pwm驱动波,驱动逆变部分功率模块工作;状态检测与容错报警部分包括步骤:检测自身状态,如果状态异常发送alarm信号给主控部分,并控制自身模组退出并联工作;上述参数k表示第k个模组的相应量,且1≤k≤m。
12.本发明的优点在于:提供了一种高频模组式飞机地面静变电源,多个高频模组并联运行,每个高频模组整流部分和逆变部分由相同的功率模块构成,功率模块开关管使用硅 mos或者碳化硅mos或者氮化镓mos,实现了飞机地面静变电源高度模块化、低谐波含量,开关频率提高至100khz以上,谐波含量小于2%,电感体积减小、噪音降低;且模组模块化实现,容易维修维护、成本降低。如果某个模组损坏将自动退出,不影响整机运行,实现自动容错,避免整机宕机。
附图说明
13.图1、图2为现有飞机地面静变电源技术方案;图3为本发明的飞机地面静变电源结构示意图;图4为本发明的功率模块拓扑图;图5为本发明的高频模组式飞机地面静变电源控制流程图;图6为本发明实施例2主控部分示意图;图7为本发明实施例2逆变功率模块控制部分示意图。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
15.实施例1本实施例提出了一种高频模组式飞机地面静变电源装置,请参照图3,包括:主控部分,电压采样模块,m个模组(m最大取10),市电输入铜排r、s、t,逆变汇流铜排a1、b1、c1,400hz输出变压器,输出滤波电容。各个模组输入端l1、l2、l3分别与市电输入r、s、t连接,输出端l1’、l2’、l3’分别与逆变汇流铜排a1、b1、c1连接,逆变汇流铜排a1、b1、c1与400hz输出变压器的原边输入端a、b、c连接,400hz输出变压器的副边输出端a、b、c分别与输出滤波电容三个输入端u1、v1、w1连接,且u1、v1、w1为飞机地面静变电源输出端u、v、w,所述400hz输出变压器副边中点n连接到飞机地面静变电源输出端n,飞机地面静变电源输出端u、v、w与电压采样模块相连,电压采样模块分别输出电压采样值u_out、v_out、w_out与主控部分连接。输出滤波电容包括c1、c2、c3三个三角形连接的相同大小的滤波电容。400hz输出变压器原边三角形连接,副边星形连接,工作频率400hz。各个模组均包含整流功率模块和逆变功率模块,整流功率模块和逆变功率模块为同一种功率模块。主控部分和逆变功率模块控制部分由fpga或者dsp实现,各模组并联均流输出,某个模组出现状态异常自动退出并联工作,不影响整机工作。
16.其中功率模块采用的电路设计请参照图4,为:包括并联连接在直流侧端口udc+、udc-的三个半桥臂和母线电容cdc,每个半桥臂分别包含串联的两个功率器件ta1与ta2、tb1与tb2、tc1与tc2,功率模块是一个双向工作的功率模块,交流侧端口为l1、l2、l3,功率器件ta1与ta2之间对应串接滤波电感la的输入端l1,功率器件tb1与tb2之间对应串接滤波电感lb的输入端l2,功率器件tc1与tc2之间对应串接滤波电感lc的输入端l3,功率器件为开关管和二极管并联。
17.功率模块内的开关管使用硅 mos、碳化硅mos或氮化镓mos,开关频率100khz以上。
18.实施例2本实施例提出了一种基于实施例1的控制方法,具体流程请参照图5,包括主控部分和逆变功率模组控制部分,主控部分包括电压解耦部分、电流d轴q轴分量接收与均值计算部分、容错处理部分,逆变功率模块控制部分包括均流控制与电流解耦部分、状态检测与容错报警部分。
19.主控部分的一种实现方式请参照图6,电压解耦部分包括步骤:进行三相电压给定值ua_ref、ub_ref、uc_ref和三相电压采样值ua_out、ub_out、uc_out到αβ的变换,变换后uα_ref、uβ_ref、uα_out、uβ_out经过dq坐标变换输出ud_ref、uq_ref、uod、uoq,经过电压外环解耦,ud_ref与uod相减后经过pi控制器调节,与uoq乘以ωc运算值相减输出电流d轴给定量ild_ref,uq_ref与uoq相减后经过pi控制器调节,与uod乘以ωc运算值相加输出电流q轴给定量ilq_ref。
20.电流d轴、q轴分量接收与均值计算部分包括步骤:接收各逆变功率模块发来的电流d轴分量和q轴分量id_1、di_2...id_m,iq_1、iq_2...iq_m,计算所有逆变功率模块的d轴分量和q轴分量平均值id_avg、iq_avg,向各逆变功率模块发送id_avg、iq_avg。
21.容错处理部分包括:接收各逆变功率模块发出的状态异常报警信号,重新计算平
均值id_avg、iq_avg,进行容错;均流控制与电流解耦部分的一种实现方式请参照图7,包括步骤:输出三相电流ia_k、ib_k、ic_k到αβ的转换输出iα和iβ,再经过dq坐标变换输出ild_k、ilq_k向主控部分发送,接收id_avg和iq_avg并计算均流差值id_avg-id_k和iq_avg-iq_k,将均流差值反馈到电流解耦部分进行均流控制,进行电流解耦,id_avg-id_k+ild_ref-ild_k经pi调节后与ilq_k乘以ωl运算后相减,再与uod相加作为ud输出,iq_avg-iq_k+ilq_ref-ilq_k经pi调节后与ild_k乘以ωl运算后相加,再与uoq相加作为uq输出,ud、uq坐标反变换得到三相调制波sina_k、sinb_k、sinc_k,上述参数k表示第k个模组的相应量,且1≤k≤m,调制波与载波比较后输出pwm驱动波,驱动逆变部分功率模块工作。
22.状态检测与容错报警部分包括步骤:检测自身状态,如果状态异常发送alarm信号给主控部分的容错处理部分进行容错,并控制自身模组退出并联工作。
23.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1