一种永磁同步电机比例加扰动观测器等效比例积分控制方法
1.本发明属于永磁同步电机控制技术领域,具体涉及一种比例加扰动观测器等效为比例积分控制方法。
背景技术:
2.随着伺服电机在工业上的广泛应用,伺服电机对速度控制的稳定性和抗干扰能力要求越来越高,因而出现了一些涉及电机本体结构优化和控制策略的研究。在传统的永磁同步电机(permanentmagnetsynchronousmotor,pmsm)转速控制中,最常使用的双闭环串级控制,外环为速度环,内环为电流环。传统的级联线性控制器如矢量控制、直接转矩控制。传统的pi控制系统通过误差反馈来消除误差,这种抗扰方式通常是缓慢、迟钝的,最理想的抗扰方式是在扰动产生的同时,就施加控制力来将其抵消。为了解决上述问题,研究学者通过提出新的控制结构及控制方法等手段对控制性能进行改善。加拿大学者davison和wonham在20世纪70年代提出“内模原理”,在此基础上发展出的扰动观测器(disturbanceobserver,dob)。它是基于知道生成扰动的模型基础上的,并不需要直接测量外扰作用。由此发展而出扰动观测和内部反馈馈补偿的复合控制方法:首先依靠输入和输出测量和受扰动被控对象的标称模型来估计扰动,再利用扰动估计构造内部反馈控制器来抵消扰动的影响。相较于传统pi可以更有效的抵抗扰动。
3.目前研究基于pi和基于dob的控制器之间关系的工作很少。因为它们在本质上是都线性的,并包含一个抵消干扰的机制,研究pi控制器于扰动观测器之间的关系就有了可能。而且pi控制器中的积分作用也对恒定扰动进行补偿,它被认为是一个隐式扰动观测器。此外,基于dob的控制器提供的干扰估计可以抵消恒定和时变的干扰。那么,这个问题值得研究,以增强pi算法抵抗恒定和时变的干扰的能力。
技术实现要素:
4.针对背景技术所存在的问题,本发明基于p+dob的控制方式,改进了传统pi控制,提高了算法的抗干扰能力,提高模型预测直接速度控制的鲁棒性。
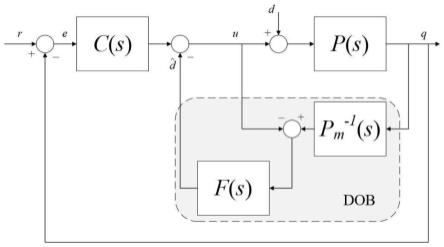
5.为实现上述目的,如图3所示为控制结构框图,本发明的技术方案如下:
6.1模型准备:将pmsm转子机械运动方程简化为常见状态方程,引入扰动观测器得到要预测的扰动估计值
7.2等价运算:根据得到的状态方程、扰动估计值和定义的比例控制信号u,进行一系列运算,得到p+dob的等效pi控制;
8.3参数整定:得到整体的闭环传递函数,推理其性能与不同控制参数的相关性;
9.4仿真实验:验证两种控制器的等效性,比较得到的带前馈pi控制器与传统pi控制器的优势;
10.本发明的机理为:一个具有扰动观测器的比例控制器,在应用于伺服驱动器时,相当于一个具有带前馈的比例积分(pi)控制器。这种等价的副产品是pi控制器的整定规
则,称为dob整定,它用dob中使用的滤波器的截止频率表示。
附图说明
11.图1为扰动观测器结构框图。
12.图2为一阶被控对象的p+dob控制器。
13.图3为等效pi控制器。
14.图4为扰动观测器观测结果图。
15.图5为两种控制器控制信号图。
16.图6为两种控制器响应结果图。
17.图7为等效pi矢量控制结构图。
18.图8为抗扰响应结果图。
具体实施方式
19.为使本发明的目的、技术方案和优点更加清楚,下面结合实施方式和附图,对本发明作进一步地详细描述。
20.参数定义及说明:ts为采样周期;ld,lq、id,iq、与ud,uq为定子dq轴上的磁链、电流、磁通施加的电压;ωe为电机的电角速度,ωm为电机的机械角速度,且ωe=n
p
·
ωm;te,t
l
分别为电机的电磁转矩和负载转矩;n
p
是磁极对数,ψf为永磁体的磁链,j为转动惯量,b为粘性摩擦系数,r为定子电阻。e为转速误差。
21.基于状态方程的永磁同步电机p+dob控制框图如图1所示,该控制框图主要包括:控制器c(s),真实的被控对象模型p(s),被控对象模型的逆扰动观测器的滤波器f(s)。对于一个存在扰动的真实系统,构造一个与其相同但无扰动的虚拟系统,使两系统具有相同的输入(通常为系统的控制量)和初始状态。在无扰动作用时,两系统应当具有相同的输出,而有扰动作用时,两系统的输出之间将会存在偏差,便可以利用此偏差信息来估计扰动。通常,p(s)具有低通滤波特性,因此具有微分特性,它会放大实际系统中的测量噪声,为此采用低通滤波器f(s)对计算得到的扰动进行滤波以得到估计的扰动。而f(s)的引入提供了将控制信号中的比例环节升阶成积分环节的功能。因此,在理论上,p+dob可以等效为某种pi控制。
22.【电机方程】
23.d-q坐标系下永磁同步电机广义机械方程:
[0024][0025][0026]
te=1.5n
p
(ψdi
q-ψqid)(3)
[0027][0028]
【模型准备】
[0029]
由pmsm转子机械运动方程(4)式,考虑一个由伺服电机、角位置传感器和工作在电流模式下的功率放大器组成的伺服驱动器。该系统的一个模型是
[0030][0031]
其中,变量q和分别是伺服驱动器的角速度和加速度,u是控制输入电流,j是伺服电机和负载的总惯性,f(q)是一个非线性摩擦项,可能包括粘性和库仑摩擦力矩,k是一个与放大器增益和电机转矩常数有关的参数,而dm是一个外部扰动。
[0032]
模型(5)可化简为下面模型:
[0033][0034]
其中,q=ωe、u=iq、
[0035]
假设d的拉普拉斯变换存在,则可以得到(6)的拉普拉斯变换:
[0036]
sq(s)=-aq(s)+bu(s)-d(s)(7)
[0037]
其中,表示拉普拉斯算子。
[0038]
在原有dob的基础上,图1给出了应用于伺服驱动器的比例控制器加上扰动观测器(p+dob)的框图。dob过滤器定义为:
[0039][0040]
截止频率β>0。所提出的p+dob控制器依赖角速度测量和伺服驱动器输入增益b的知识。
[0041]
【等价运算】
[0042]
不考虑输入约束的情况下,定义p+dob控制率如下:
[0043][0044]
比例增益k
p
是正常数,r是一个恒定的期望参考值,输入与输出误差e=r-q,是扰动d的估计值。
[0045]
对控制律(9)进行拉普拉斯变换得:
[0046][0047]
其中,
[0048]
另一方面,dob的动力学模型如下:
[0049][0050]
将(9)代入(11)得到:
[0051]
[0052]
再对其进行拉普拉斯变换得:
[0053][0054]
把(13)代入(10)得:
[0055][0056]
对(14)拉普拉斯逆变换得:
[0057][0058]
将q=r-e代入(15)得:
[0059][0060]
其中
[0061][0062]
因此p+dob可以等价为带有比例积分前馈环节的pi控制器,框图如图3所示。因为a值常常很小可以忽略不计,可以简化为带有比例前馈环节的pi控制器。
[0063]
【参数整定】
[0064]
不考虑干扰,由装置(7)与控制器(14)的可得闭环传递函数:
[0065][0066]
因为β为正常数,所以
[0067][0068]kp
为正常数的事实保证了对控制器进行dob整定时g(s)的极点是稳定的。
[0069]
【仿真实验】
[0070]
仿真参数如下所示:极对数n
p
=4,永磁链ψf=0.147wb,d-q轴电感ld=lq=3.3mh,转动惯量j=0.00268kgm2,粘滞系数bm=0.0034kgm/s2,采样时间ts=10μs,dc总线电压v
dc
=220v,参考转速n
ref
=1000rpm,参考转速ω
ref
=n
ref
·
(π/30)rad/s。
[0071]
以下仿真实验均在初始负载转矩给定t
l
=0n
·
m,转速给定初始n
ref
=1000rpm的条件下,在0.2s改变n
ref
=800rpm,在0.35s增加负载t
l
=10n
·
m下进行。
[0072]
1根据图4,一定时间后,扰动观测器可以准确地观测到负载转矩,且观测的快慢与滤波器的带宽β有关。
[0073]
2验证等效运算结果是否正确,根据实验结果,当两种控制器选用相同比例和带宽参数时,由图5、图6可知两种控制器的控制信号输出相同,对给定速度信号的响应结果也相同,而且因为过程函数为一阶,且不会产生超调。
[0074]
3相似的,将等价后的带前馈pi算法应用到图7矢量控制模型,加入扰动后,由图8可知因为前馈环节的引入,起到了一种扰动观测器的效果,使得其抗干扰能力明显强于一
般pi控制器。
[0075]
综上,本发明提出了一种带前馈pi控制方法。该方案通过对p+dob算法的等效得来,两个控制器产生平滑的响应,没有超调,本质上相同的性能,在实际应用中,由于传感器或者滤波器的影响,存在轻微的差异。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1