一种电子机械制动系统多阶段闭环级联控制方法
1.本技术涉及电子机械制动系统技术领域,尤其涉及一种电子机械制动系统多阶段闭环级联控制方法。
背景技术:
2.汽车智能化和电动化的发展要求制动系统能够实现主动制动和制动能量回收等功能,传统真空助力式制动系统由于无法满足上述要求而逐渐被淘汰,线控制动系统成为公认的主流解决方案。线控制动系统主要分为两类:电子液压制动系统和电子机械制动系统。电子液压制动系统由于保留了大部分的液压元件,导致管路布置复杂,面临制动液泄露等问题,其并非真正意义上的线控制动。
3.电子机械制动系统完全取消了液压系统,是一种电控纯机械制动系统,其具有结构紧凑、响应迅速、控制精确、兼容性强等突出优势,被认为是未来汽车制动系统的最佳解决方案。在准确获得制动命令的情况下,如何精确快速地控制各个车轮的夹紧力是目前电子机械制动系统的研究重点和难点。但目前的研究仅关注于电子机械制动系统的夹紧力控制阶段,缺乏对电子机械制动系统控制全过程的全面分析和详细探讨。此外,电子机械制动系统中存在的非线性刚度和摩擦负载扰动等问题,严重阻碍了其高精度控制效果的实现,因此迫切需要完备优越的控制算法来实现控制量对目标值快速准确的跟随。
技术实现要素:
4.本技术提供了一种电子机械制动系统多阶段闭环级联控制方法,其技术目的是对电子机械制动系统的位置控制和夹紧力控制实现高精度伺服,实现实际控制量对目标值快速准确的跟随,有效克服电子机械制动系统摩擦阻碍和非线性特性等问题。
5.本技术的上述技术目的是通过以下技术方案得以实现的:
6.一种电子机械制动系统多阶段闭环级联控制方法,包括:
7.s1:通过模式判断模块对当前所处的制动模式进行判断,获取当前制动模式;其中,模式判断模块基于目标夹紧力、实际夹紧力和夹紧力阈值构建;制动模式包括制动间隙消除模式、夹紧力施加模式、夹紧力释放模式和制动间隙恢复模式;
8.s2:根据当前制动模式输出参考电流到电流环控制器,通过电流环控制器对电子机械制动系统进行控制;其中,制动间隙消除模式下的参考电流通过速度环获取;夹紧力施加模式下的参考电流通过压力环获取;夹紧力释放模式下的参考电流通过压力-速度双闭环获取;制动间隙恢复模式下的参考电流通过位置-速度双闭环获取。
9.本技术的有益效果在于:本技术所述的电子机械制动系统多阶段闭环级联控制方法,其电子机械制动系统提供了完整的闭环控制策略,实现实际控制量对目标值快速准确的跟随,有效克服电子机械制动系统摩擦阻碍和非线性特性等问题,实现高精度的伺服位置控制和夹紧力控制,提高电子机械制动系统的可靠性和安全性,为电机机械制动系统主动制动功能奠定基础,匹配汽车智能化、电动化的需求。
附图说明
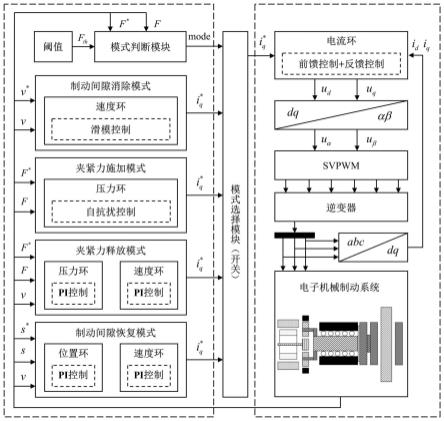
10.图1为电子机械制动系统多阶段闭环级联控制框图;
11.图2为电子机械制动系统的结构示意图;
12.图3为在阶跃目标压力信号下工作模式标志位变化曲线;
13.图4为在阶跃目标压力信号下转速变化曲线;
14.图5为在阶跃目标压力信号下夹紧力变化曲线;
15.图6为在阶跃目标压力信号下滚珠丝杠位移变化曲线;
16.图7为在阶跃目标压力信号下制动间隙变化曲线。
具体实施方式
17.下面将结合附图对本技术技术方案进行详细说明。
18.如图1所示,本技术所述的电子机械制动系统多阶段闭环级联控制方法,包括:
19.s1:通过模式判断模块对当前所处的制动模式进行判断,获取当前制动模式;其中,模式判断模块基于目标夹紧力、实际夹紧力和夹紧力阈值构建;制动模式包括制动间隙消除模式、夹紧力施加模式、夹紧力释放模式和制动间隙恢复模式。
20.s2:根据当前制动模式输出参考电流到电流环控制器,通过电流环控制器对电子机械制动系统进行控制;其中,制动间隙消除模式下的参考电流通过速度环获取;夹紧力施加模式下的参考电流通过压力环获取;夹紧力释放模式下的参考电流通过压力-速度双闭环获取;制动间隙恢复模式下的参考电流通过位置-速度双闭环获取。
21.图2为电子机械制动系统的结构示意图,该电子机械制动系统包括制动盘1、制动垫片2、活塞3、压力传感器4、滚珠丝杠5、行星架6、行星轮7、内齿圈8、电机定子9、电机转子10和太阳轮11。电子机械制动系统的工作原理为:电机转子10带动太阳轮11,经行星轮7和行星架6实现减速增扭,然后再通过滚珠丝杠5将选择运动转化为直线运动,带动活塞3平动,进而推动制动垫片2与制动盘1接触施加夹紧力。
22.作为具体实施例地,所述模式判断模块的输入量包括目标夹紧力f
*
、实际夹紧力f和夹紧力阈值f
th
,则根据模式判断模块进行制动模式判断包括:
23.(1)制动间隙消除模式的标志位为:mode=1;其判断依据为:f
*
>0且f≤f
th
;
24.(2)夹紧力施加模式的标志位为:mode=2;其判断依据为:f
*
>0且f>f
th
;
25.(3)夹紧力释放模式的标志位为:mode=3;其判断依据为:f
*
=0且f>f
th
;
26.(4)制动间隙恢复模式的标志位为:mode=4;其判断依据为:f
*
=0且f≤f
th
。
27.作为具体实施例地,所述速度环的构建过程包括:
28.采用id=0的转子磁场定向控制方法,此时表贴式永磁同步电机的数学模型表示为:
29.30.其中,iq表示转矩轴电流,ls表示定子电感,r表示定子电压,pn表示磁极对数,φf表示永磁体磁链,uq表示q轴电压,v表示电机机械角速度,j表示电机等效转动惯量,t
l
表示电机负载转矩,te表示电磁转矩;
31.则永磁同步电机的状态变量表示为:
[0032][0033]
其中,x1、x2均表示电机的状态变量;v
*
表示电机的目标机械角速度;
[0034]
由式(1)和式(2)得到:
[0035][0036]
定义滑模面函数表示为:s=cx1+x2;(4)
[0037]
其中,s表示滑模面函数;c表示正的设计参数;
[0038]
对式(4)进行求导,得到:
[0039][0040]
对式(5)采用指数趋近律,得到:
[0041][0042]
其中,ε1、ε2均表示设计参数,且都为正数;
[0043]
根据式(6)得到所述速度环,表示为:
[0044][0045]
其中,即所述速度环输出的参考电流。综上过程,易证,本技术所述的电子机械制动系统是渐进稳定的。
[0046]
作为具体实施例地,所述压力环的构建过程表示为:
[0047]
将电子机械制动系统近似为二阶非线性系统,表示为:
[0048][0049]
其中,x3、x4均表示电子机械制动系统的状态变量;f(x3,x4)表示非线性函数;γ(t)表示电子机械制动系统的未知扰动;b表示电子机械制动系统增益;u(t)表示电子机械制动系统输入量;y表示电子机械制动系统输出量;
[0050]
根据式(8)对跟踪微分器进行设计,则跟踪微分器表示为:
[0051]
[0052]
其中,flan(x3,x4,r,h)表示最速控制综合函数;
[0053]
令fsg(x,d)=(sign(x+d)-sign(x-d))/2,则最速控制综合函数表示为:
[0054][0055]
其中,r表示速度因子;h表示滤波因子;
[0056]
对扩张状态观测器进行设计,则扩张状态观测器表示为:
[0057][0058]
其中,
[0059]
β1、β2、β3、α均表示控制参数,b0表示输入增益估计值;δ表示线性区间大小;
[0060]
根据式(11)和式(12)对非线性反馈空置律进行设计,得到非线性反馈空置律表示为:
[0061][0062]
其中,λ1、λ2、ζ1、ζ2、δ均表示电子机械制动系统的设计参数;
[0063]
根据式(13)得到所述压力环,表示为:
[0064][0065]
其中,即所述压力环输出的参考电流。
[0066]
作为具体实施例地,所述压力-速度双闭环包括压力环控制器和第一速度环控制器,所述压力环控制器表示为:
[0067]v*
(t)=k
pf1
(f
*-f)+k
if2
∫(f
*-f)dt;(15)
[0068]
其中,k
pf1
表示压力环控制器的比例系数,k
if2
表示压力环控制器的积分系数;
[0069]
根据式(15)对第一速度环控制器进行设计,得到第一速度环控制器表示为:
[0070][0071]
其中,k
pv1
表示第一速度环控制器的比例系数;k
iv1
表示第一速度环控制器的积分系数;即压力-速度双闭环输出的参考电流。
[0072]
作为具体实施例地,所述位置-速度双闭环包括位置环控制器和第二速度环控制器,所述位置环控制器表示为:
[0073]v*
(t)=k
ps
(s
*-s)+k
is
∫(s
*-s)dt;(17)
[0074]
其中,k
ps
表示位置环控制器的比例系数,k
is
表示位置环控制器的积分系数;
[0075]
根据式(17)对第二速度环控制器进行设计,得到第二速度环控制器表示为:
[0076][0077]
其中,k
pv2
表示第二速度环控制器的比例系数;k
pi2
表示第二速度环控制器的积分系数;即位置-速度双闭环输出的参考电流。
[0078]
作为具体实施例地,所述电流环控制器包括电压前馈和pi控制,所述电流环控制器表示为:
[0079][0080]
其中,表示转矩轴目标电压;表示励磁轴目标电压;k
dp
、k
qp
均表示比例增益;k
di
、k
qi
均表示积分增益;表示电机目标转矩轴电流;表示目标励磁轴电流;iq表示转矩轴电流;id表示励磁轴电流;ωe表示电角速度;lq表示转矩轴电感;ld表示励磁轴电感;φf表示永磁体磁链。
[0081]
作为具体实施例地,在matlab/simulink搭建的仿真平台中对本技术设计的电子机械制动系统多阶段闭环级联控制方法进行了测试。
[0082]
由图3至图7可知,工作标志位初始为1,表明电子机械制动系统首先处于制动间隙消除模式,电机转速快速上升,丝杠快速平动以消除制动间隙,缩短制动响应时间,此阶段的夹紧力为零。工作标志位变为2时,电子机械制动系统处于夹紧力施加模式,电机转速快速下降直至基本为零(堵转状态),丝杠平移至夹紧力达到目标值后停止运动。工作标志位变为3时,电子机械制动系统处于夹紧力释放模式,电机快速反转至夹紧力为零。工作标志位变为4时,电子机械制动系统处于制动间隙恢复模式,电机反转带动关注丝杠后退,直至恢复制动间隙的初始位置。因此证明了本技术所述的电子机械制动系统多阶段闭环级联控制方法的有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1