一种永磁同步电机转子初始位置检测方法与装置与流程
本发明属于永磁同步电机控制领域,尤其涉及一种永磁同步电机转子初始位置检测方法与装置。
背景技术:
1、永磁同步电机具有功率密度大、调速性能优、效率高等优势,在电动汽车、工业传动、机器人、新能源发电等场合得到广泛应用。
2、永磁同步电机转子由永磁体材料构成,在启动阶段,必须获取转子上永磁体n极的方向,即永磁同步电机的转子初始位置。如果转子初始位置获取不准确,会导致永磁同步电机反转、启动转矩降低、启动失败等问题。
3、脉冲电压注入是永磁同步电机转子初始位置检测的有效方法之一,通过在定子侧注入不同方向的电压空间矢量,根据电流响应特征可实现转子初始位置的检测。在现有技术中,申请号为201510916273.5的发明专利通过设定50-100个假定转子位置并利用svpwm方法向定子侧注入50-100个脉冲电压,依据假定坐标系下的d轴电流响应完成转子初始位置检测。为提高转子初始位置精度,申请号为201711470614.6的发明专利设定了23个假定转子位置并向定子侧注入23个脉冲电压,依据假定坐标系下的d轴和q轴电流响应完成转子初始位置检测。申请号为202210584850.5的发明专利利用注入两个脉冲所产生的第一流响应来计算转子初始位置,未考虑电机饱和效应引起电感参数变化引起的精度降低问题,且需要采用转子微动法判断转子永磁体n极方向,但对于未安装转子位置传感器的场合,无法测量转子位置判断其微动的方向,因此只适合于安装转子位置传感器的场合。
4、虽然上述方法能够实现转子初始位置的检测,但是要么需要注入的脉冲数较多,存在检测时间长和噪音大的问题,要么只适合于安装转子位置传感器的场合。
技术实现思路
1、本发明实施例的目的在于提供一种永磁同步电机转子初始位置检测装置与方法,以解决上述技术问题。
2、本发明按以下技术方案实现:
3、本发明提供了一种永磁同步电机转子初始位置检测方法,所述方法包括:
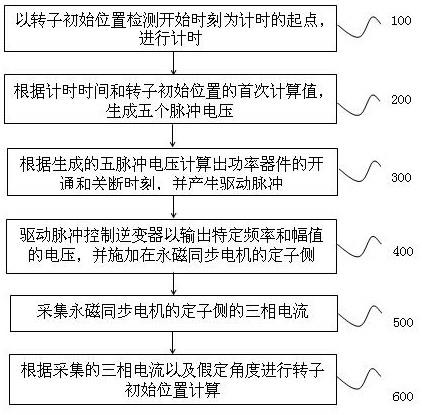
4、以转子初始位置检测开始时刻为计时的起点,进行计时;
5、根据计时时间和转子初始位置检测的首次计算值,并生成五个脉冲电压;
6、根据生成的五脉冲电压计算出功率器件的开通和关断时刻,并产生驱动脉冲;
7、驱动脉冲控制逆变器以输出特定频率和幅值的电压,并施加在永磁同步电机的定子侧;
8、采集永磁同步电机的定子侧的三相电流;
9、根据采集的三相电流以及假定角度进行转子初始位置计算;所述假定角度根据计时时间和转子初始位置的首次计算值产生。
10、在一种实施方式中,所述根据计时时间和转子初始位置的首次计算值,生成五个脉冲电压,具体包括:
11、根据计时时间t和转子初始位置的首次计算值θ0产生假定角度θ;
12、通过假定角度θ生成α轴电压参考值和β轴电压参考值
13、在一种实施方式中,根据计时时间t和转子初始位置的首次计算值θ0产生假定角度θ,具体为:
14、当0≤t<t0时,θ为30度;
15、当t0≤t<2t0时,θ为150度;
16、当2t0≤t<3t0时,θ为270度;
17、当3t0≤t<4t0时,θ为θ0;
18、当4t0≤t<5t0时,θ为θ1,其中θ1计算公式如下:
19、
20、其中,t0为脉冲电压注入周期,一般不超过5ms。
21、在一种实施方式中,所述通过假定角度θ生成α轴电压参考值和β轴电压参考值具体为:
22、当0≤t<t1时,为um cos(θ),为umsin(θ);
23、当t1≤t<t0时,为0,为0;
24、当t0≤t<(t0+t1)时,为umcos(θ),为um sin(θ);
25、当(t0+t1)≤t<2t0时,为0,为0;
26、当2t0≤t<(2t0+t1)时,为umcos(θ),为umsin(θ);
27、当(2t0+t1)≤t<3t0时,为0,为0;
28、当3t0≤t<(3t0+t1)时,为umcos(θ),为um sin(θ);
29、当(3t0+t1)≤t<4t0时,为0,为0;
30、当4t0≤t<(4t0+t1)时,为umcos(θ),为umsin(θ);
31、当(4t0+t1)≤t<5t0时,为0,为0。
32、其中,t1表示脉冲电压注入的时间,t1为t0的20%-50%,um为注入电压的幅值。
33、在一种实施方式中,所述用于根据采集的三相电流以及假定角度进行转子初始位置计算,具体包括:
34、根据三相电流ia、ib与ic计算假定d轴电流和假定q轴电流
35、根据前3个注入的脉冲电压产生的电流响应,并引入中间变量θm用来计算转子初始位置的首次计算值θ0;
36、在转子初始位置的首次计算值θ0计算完成后,完成剩下2个脉冲电压的生成;
37、脉冲电压的生成完成后进行转子初始位置的计算。
38、在一种实施方式中,所述根据三相电流ia、ib与ic计算假定d轴电流和假定q轴电流具体为:
39、
40、当0≤t<t0时,计算此时段的最大值,记作id1,当小于0时,计算此时段的最小值,记作iq1,而当大于或者等于0时,计算此时段的最大值,记作iq1;
41、当t0≤t<2t0时,计算此时段的最大值,记作id2,当小于0时,计算此时段的最小值,记作iq2,而当大于或者等于0时,计算此时段的最大值,记作iq2;
42、当2t0≤t<3t0时,计算此时段的最大值,记作id3,当小于0时,计算此时段的最小值,记作iq3,而当大于或者等于0时,计算此时段的最大值,记作iq3。
43、在一种实施方式中,所述根据前3个注入的脉冲电压产生的电流响应,并引入中间变量θm用来计算转子初始位置的首次计算值θ0;具体为:
44、当t=3t0时,引入中间变量θm计算θ0,其计算过程如下:
45、如果iq1与iq2的乘积大于0,则θm按照下式计算:
46、
47、如果iq1与iq3的乘积大于0,则θm按照下式计算:
48、
49、如果iq2与iq3的乘积大于0,则θm按照下式计算:
50、
51、其中,atan2为反正切函数;
52、获取θm后,θ0按照下式计算:
53、
54、在一种实施方式中,所脉冲电压的生成完成进行转子初始位置的计算,具体为:
55、当3t0≤t<4t0时,计算此时段的最大值,记作id4;
56、当4t0≤t<5t0时,计算此时段的最大值,记作id5;
57、在当t=5t0时,按照以下方法计算转子初始位置:
58、当id4大于id5,则转子初始位置θe0的计算公式如下:
59、θe0=θ0
60、否则,转子初始位置θe0的计算公式如下:
61、θe0=θ1。
62、本发明还提供了一种永磁同步电机转子初始位置检测装置,该装置包括:
63、时钟单元,用来计时且计时的起点为转子初始位置检测开始时刻;
64、五脉冲电压生成单元,用于产生假定角度,并根据时钟单元输出的时间t与转子初始位置计算单元输出转子初始位置的首次计算值,产生五个脉冲电压;
65、svpwm单元,用于根据五脉冲电压计算出逆变器功率器件的开通和关断时刻,并产生驱动脉冲;
66、逆变器单元,用于根据接收的驱动脉冲,输出特定频率和幅值的电压,并施加在永磁同步电机的定子侧;
67、电流采样单元,用于采集永磁同步电机的定子侧的三相电流;
68、转子初始位置计算单元,用于根据三相电流以及五脉冲电压生成单元产生的假定角度进行转子初始位置计算。
69、在一种实施方式中,所述时钟单元可以使用数字处理芯片的定时器中断功能来实现。
70、本发明有益效果:
71、本发明只需要注入五个脉冲电压,即可实现转子初始位置的高精度检测,并且有效克服了现有技术定位时间长和噪音大的问题。本发明利用注入的前三个脉冲假定q轴电流响应的符号来选取其中两个脉冲的电流响应完成转子初始位置的首次计算,能够有效解决电机饱和效应引起的精度降低问题。此外,本发明无需利用转子微动法判断转子永磁体n极方向,既可应用安装位置传感器的场合也可应用于未安装位置传感器的场合。
- 还没有人留言评论。精彩留言会获得点赞!