两轴位移装置的制作方法
1.本实用新型涉及精密运动装备技术领域,具体而言,涉及一种两轴位移装置。
背景技术:
2.在精密运动装备制造领域,大行程运动台技术是一项核心技术,一直受到行业内的高度重视。在大行程位移装置中,位移装置的运动往往会产生很大的反向作用力,尤其是在加速和减速阶段产生的反向作用力要更大,由此反向作用力引发的振动冲击影响,极大地干扰了位移装置的定位精度、反应速度和稳定时间,因此需要设计平衡质量部件充当反力引导机构,承担位移装置的反向作用力和反向位移,抵消位移过程中产生的振动冲击影响。
3.平衡质量部件的设计基于动量守恒原理,电机驱动力作用于平面运动组件上,推动平面运动组件产生运动,同时电机驱动反力作用于平衡质量上,推动平衡质量反向运动,平衡质量部件的设计基本能消除传递到装置框架的扰动。
4.现有技术中,有通过气浮装置支撑平面运动的位移装置,在实现了水平两自由度的反力引导作用外,还会附加水平面上的旋转力矩作用,该旋转力矩产生的角位移并不满足角动量守恒原理。为了解决旋转力矩引起的角位移的问题,各单位先后引入各种方法和措施,如专利cn1252542c中提到的飞轮机构、专利cn100526993c中提到的旋转机械手、专利cn104181778中提到的反力矩机构等方法措施,这些措施虽然一定程度上解决了附加旋转力矩引起的角位移问题,但由于这些附加机构需要不停地往复启动和运动,造成了反应上的迟滞,还会在启动和加减速过程中对位移装置引起附加的振动冲击影响。
技术实现要素:
5.本实用新型提供了一种两轴位移装置,以解决现有技术中的位移装置抵消附加旋转力矩效果差的问题。
6.为了解决上述问题,本实用新型提供了一种两轴位移装置,包括支撑台、平衡质量组件和平面运动组件;平衡质量组件包括第一质量块、第二质量块、第三质量块和第四质量块,第一质量块和第二质量块均可沿第一水平方向滑动地设置于支撑台上,且第一质量块和第二质量块在第二水平方向相对设置,第三质量块和第四质量块均可沿第二水平方向滑动地设置于支撑台上,且第三质量块和第四质量块在第一水平方向相对设置,第二水平方向垂直于第一水平方向;平面运动组件包括运动台和驱动组件,运动台分别滑动连接至第一质量块、第二质量块、第三质量块和第四质量块,驱动组件的定子相对平衡质量组件固定,驱动组件的动子相对运动台固定,以驱动运动台沿第一水平方向和/或第二水平方向运动。
7.进一步地,平衡质量组件还包括第一导向机构、第二导向机构、第三导向机构和第四导向机构;第一导向机构包括第一导轨和第一移动部,第一导轨连接至支撑台且沿第一水平方向延伸,第一移动部可滑动或滚动地和第一导轨配合,第一移动部和第一质量块连
接;第二导向机构包括第二导轨和第二移动部,第二导轨连接至支撑台且沿第一水平方向延伸,第二移动部可滑动或滚动地和第二导轨配合,第二移动部和第二质量块连接;第三导向机构包括第三导轨和第三移动部,第三导轨连接至支撑台且沿第二水平方向延伸,第三移动部可滑动或滚动地和第三导轨配合,第三移动部和第三质量块连接;第四导向机构包括第四导轨和第四移动部,第四导轨连接至支撑台且沿第二水平方向延伸,第四移动部可滑动或滚动地和第四导轨配合,第四移动部和第四质量块连接。
8.进一步地,还包括防漂组件,防漂组件设置在支撑台上,防漂组件包括:第一防漂部,第一防漂部包括第一驱动电机,第一驱动电机的定子连接至支撑台,第一驱动电机的动子连接至第一质量块的一端;第二防漂部,第二防漂部包括第二驱动电机,第二驱动电机的定子连接至支撑台,第二驱动电机的动子连接至第二质量块的一端;第三防漂部,第三防漂部包括第三驱动电机,第三驱动电机的定子连接至支撑台,第三驱动电机的动子连接至第三质量块的一端;第四防漂部,第四防漂部包括第四驱动电机,第四驱动电机的定子连接至支撑台,第四驱动电机的动子连接至第四质量块的一端。
9.进一步地,第一防漂部还包括第一弹性机构,第一弹性机构的一端连接至第一质量块的另一端,第一弹性机构的另一端连接至支撑台;第二防漂部还包括第二弹性机构,第二弹性机构的一端连接至第二质量块的另一端,第二弹性机构的另一端连接至支撑台;第三防漂部还包括第三弹性机构,第三弹性机构的一端连接至第三质量块的另一端,第三弹性机构的另一端连接至支撑台;第四防漂部还包括第四弹性机构,第四弹性机构的一端连接至第四质量块的另一端,第四弹性机构的另一端连接至支撑台。
10.进一步地,驱动组件包括第五驱动电机、第六驱动电机、第七驱动电机、第八驱动电机、第九导向机构和第十导向机构;第五驱动电机的定子相对第一质量块固定,第五驱动电机的动子连接至第九导向机构的一端;第六驱动电机的定子相对第二质量块固定,第六驱动电机的动子连接至第九导向机构的另一端;第七驱动电机的定子相对第三质量块固定,第七驱动电机的动子连接至第十导向机构的一端;第八驱动电机的定子相对第四质量块固定,第八驱动电机的动子连接至第十导向机构的另一端;第九导向机构沿第二水平方向延伸,第九导向机构和运动台配合,以带动运动台沿第一水平方向移动,及在第二水平方向对运动台导向;第十导向机构沿第一水平方向延伸,第十导向机构和运动台配合,以带动运动台沿第二水平方向移动,及在第一水平方向对运动台导向。
11.进一步地,驱动组件还包括第五导向机构、第六导向机构、第七导向机构和第八导向机构;第五导向机构包括第五导轨和第五移动部,第五导轨连接至第一质量块且沿第一水平方向延伸,第五移动部可滑动或滚动地和第五导轨配合,第五移动部和第九导向机构的一端连接;第六导向机构包括第六导轨和第六移动部,第六导轨连接至第二质量块且沿第一水平方向延伸,第六移动部可滑动或滚动地和第六导轨配合,第六移动部和第九导向机构的另一端连接;第七导向机构包括第七导轨和第七移动部,第七导轨连接至第三质量块且沿第二水平方向延伸,第七移动部可滑动或滚动地和第七导轨配合,第七移动部和第十导向机构的一端连接;第八导向机构包括第八导轨和第八移动部,第八导轨连接至第四质量块且沿第二水平方向延伸,第八移动部可滑动或滚动地和第八导轨配合,第八移动部和第十导向机构的另一端连接。
12.进一步地,平面运动组件还包括连接架,运动台设置在连接架上;第九导向机构包
括第一导梁和设置在第一导梁上的第九机械导轨,第一导梁和第九机械导轨均穿过连接架,第九机械导轨和连接架滑动连接;第十导向机构和第九导向机构在竖直方向间隔开,第十导向机构包括第二导梁和设置在第二导梁上的第十机械导轨,第二导梁和第十机械导轨均穿过连接架,第十机械导轨和连接架滑动连接;第五驱动电机的动子连接至第一导梁的一端,第六驱动电机的动子连接至第一导梁的另一端;第七驱动电机的动子连接至第二导梁的一端,第八驱动电机的动子连接至第二导梁的另一端。
13.进一步地,第一质量块包括第一主体和凸出设置在第一主体上的第一支梁,第一支梁沿第一水平方向延伸,第五驱动电机的定子设置在第一主体上,第五导向机构的第五导轨设置在第一支梁上;第二质量块包括第二主体和凸出设置在第二主体上的第二支梁,第二支梁沿第一水平方向延伸,第六驱动电机的定子设置在第二主体上,第六导向机构的第六导轨设置在第二支梁上;第三质量块包括第三主体和凸出设置在第三主体上的第三支梁,第三支梁沿第二水平方向延伸,第七驱动电机的定子设置在第三主体上,第七导向机构的第七导轨设置在第三支梁上;第四质量块包括第四主体和凸出设置在第四主体上的第四支梁,第四支梁沿第二水平方向延伸,第八驱动电机的定子设置在第四主体上,第八导向机构的第八导轨设置在第四支梁上。
14.进一步地,第一质量块包括相互连接的第一主体和第一连接板,第一主体滑动连接至支撑台;第二质量块包括相互连接的第二主体和第二连接板,第二主体滑动连接至支撑台;第三质量块包括相互连接的第三主体和第三连接板,第三主体滑动连接至支撑台;第四质量块包括相互连接的第四主体和第四连接板,第四主体滑动连接至支撑台;第一连接板、第二连接板均与第三连接板、第四连接板在竖直方向间隔开;平衡质量组件还包括第十一导向机构和第十二导向机构,第十一导向机构沿第一水平方向延伸,第十二导向机构沿第二水平方向延伸;第一连接板和第二连接板通过第十一导向机构滑动连接,第三连接板和第四连接板通过第十二导向机构滑动连接。
15.进一步地,第一连接板为具有第一凹槽的u型结构,第二连接板为具有第二凹槽的u型结构,第一凹槽和第二凹槽对接组成第一避让孔;第三连接板为具有第三凹槽的u型结构,第四连接板为具有第四凹槽的u型结构,第三凹槽和第四凹槽对接组成第二避让孔;支撑台包括底座和设置在底座上的凸台,凸台设置在第一避让孔和第二避让孔内。
16.进一步地,支撑台包括底座和设置在底座上的凸台,第一导向机构、第二导向机构、第三导向机构和第四导向机构均设置在底座上;两轴位移装置还包括重力补偿部,重力补偿部设置在凸台上,重力补偿部与平面运动组件的下侧配合,以抵消平面运动组件的至少一部分重力。
17.进一步地,重力补偿部为气浮单元,气浮单元包括气浮垫和气浮面板,气浮垫设置在运动台的下侧,气浮面板设置在凸台上;或者,重力补偿部为磁力单元,磁力单元包括第一磁体阵列和第二磁体阵列,第一磁体阵列设置在运动台的下侧,第二磁体阵列设置在凸台上,第一磁体阵列和第二磁体阵列相互排斥。
18.本方案提供的两轴位移装置,至少可产生以下有益效果:
19.通过第一质量块、第二质量块、第三质量块和第四质量块的反力引导作用组合,可以将平面运动组件在位移过程中引起的旋转角位移,转化为第一质量块和第二质量块在第一水平方向上的直线位移或者位移差,或者转化成第三质量块和第四质量块在第二水平方
向上的直线位移或者位移差。与现有技术相比,该方案实现了对附加旋转力矩的运动反冲和缓冲消化的效果,极大削弱了平面运动组件运动过程中在旋转方向上对支撑台产生的振动干扰影响,提高位移装置整体运动的稳定性和定位精度。并且,与现有的位移装置中的附加机构相比,该方案不会有反应迟滞的问题,不会在启动和加减速过程中对位移装置引起附加的振动冲击。
20.并且,平面运动组件在沿第一水平方向移动时,第一质量块和第二质量块在第一水平方向相对于平面运动组件反向移动,充当反力引导机构,平面运动组件在沿第二水平方向移动时,第三质量块和第四质量块在第二水平方向相对于平面运动组件反向移动,充当反力引导机构,因此,该方案中的四个质量块可在两个方向上抵消平面运动组件在移动过程中产生的振动冲击影响,该两轴位移装置中的平面运动组件在两个相互垂直的方向移动时均可通过质量块抵消振动冲击,即实现了二运动轴的反力引导。
21.而且,本方案通过精简的结构即实现了二运动轴的反力引导以及抵消附加旋转力矩,在满足位移稳定性和精度的同时,降低了制造难度和成本。
附图说明
22.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
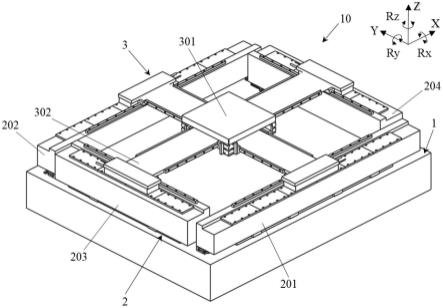
23.图1示出了本实用新型的实施例一提供的两轴位移装置的结构示意图;
24.图2示出了图1中的一部分机构的爆炸图;
25.图3示出了图1中的两轴位移装置的爆炸图;
26.图4示出了图1中的两轴位移装置中的平面运动组件在第一水平方向的位移示意图;
27.图5示出了图4中的两轴位移装置中各部件的移动距离示意图;
28.图6示出了图1中的两轴位移装置中的平面运动组件在第二水平方向的位移示意图;
29.图7示出了图6中的两轴位移装置中各部件的移动距离示意图;
30.图8示出了本实用新型的实施例二提供的两轴位移装置的结构示意图;
31.图9示出了图8中的一部分机构的爆炸图;
32.图10示出了本实用新型的实施例三提供的两轴位移装置的结构示意图;
33.图11示出了本实用新型的实施例四提供的两轴位移装置的结构示意图;
34.图12示出了图11中的两轴位移装置的爆炸图。
35.其中,上述附图包括以下附图标记:
36.10、两轴位移装置;
37.1、支撑台;101、底座;102、凸台;
38.2、平衡质量组件;
39.201、第一质量块;2011、第一主体;2012、第一支梁;2013、第一连接板;
40.211、第一导向机构;
41.202、第二质量块;2021、第二主体;2022、第二支梁;2023、第二连接板;
42.212、第二导向机构;
43.203、第三质量块;2031、第三主体;2032、第三支梁;2033、第三连接板;
44.213、第三导向机构;
45.204、第四质量块;2041、第四主体;2042、第四支梁;2043、第四连接板;
46.214、第四导向机构;
47.205、第十一导向机构;206、第十二导向机构;207、第一避让孔;208、第二避让孔;
48.3、平面运动组件;
49.301、运动台;
50.302、驱动组件;
51.312、第五驱动电机;322、第六驱动电机;332、第七驱动电机;342、第八驱动电机;
52.3021、第五导向机构;3022、第六导向机构;3023、第七导向机构;3024、第八导向机构;
53.352、第九导向机构;3521、第一导梁;3522、第九机械导轨;
54.362、第十导向机构;3621、第二导梁;3622、第十机械导轨;
55.303、连接架;
56.511、第一驱动电机;521、第一弹性机构;
57.512、第二驱动电机;522、第二弹性机构;
58.513、第三驱动电机;523、第三弹性机构;
59.514、第四驱动电机;524、第四弹性机构;
60.61、气浮单元;611、气浮垫;612、气浮面板;
61.62、磁力单元;621、第一磁体阵列;622、第二磁体阵列。
具体实施方式
62.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
63.实施例一
64.如图1所示,本实用新型的实施例一提供了一种两轴位移装置10,包括支撑台1、平衡质量组件2和平面运动组件3;平衡质量组件2包括第一质量块201、第二质量块202、第三质量块203和第四质量块204,第一质量块201和第二质量块202均可沿第一水平方向滑动地设置于支撑台1上,且第一质量块201和第二质量块202在第二水平方向相对设置,第三质量块203和第四质量块204均可沿第二水平方向滑动地设置于支撑台1上,且第三质量块203和第四质量块204在第一水平方向相对设置,第二水平方向垂直于第一水平方向;平面运动组件3包括运动台301和驱动组件302,运动台301分别滑动连接至第一质量块201、第二质量块202、第三质量块203和第四质量块204,驱动组件302的定子相对平衡质量组件2固定,驱动组件302的动子相对运动台301固定,以驱动运动台301沿第一水平方向和/或第二水平方向运动。
65.在附图中,右上角为直角坐标系,x表示第一水平方向,y表示第二水平方向,z表示竖直方向,rx表示x的周向,ry表示y的周向,rz表示z的周向。
66.本方案提供的两轴位移装置10,通过平衡质量组件中第一质量块201、第二质量块202、第三质量块203和第四质量块204的反力引导作用组合,可以将平面运动组件3在位移过程中引起的旋转角位移,转化为第一质量块201和第二质量块202在第一水平方向x上的直线位移或者位移差,或者转化成第三质量块203和第四质量块204在第二水平方向y上的直线位移或者位移差。与现有技术相比,该方案实现了对附加旋转力矩的运动反冲和缓冲消化的效果,极大削弱了平面运动组件3运动过程中在rz旋转方向上对支撑台1产生的振动干扰影响,提高位移装置整体运动的稳定性和定位精度。并且,与现有的位移装置中的附加机构相比,该方案不会有反应迟滞的问题,不会在启动和加减速过程中对位移装置引起附加的振动冲击。
67.并且,平面运动组件3在沿第一水平方向移动时,第一质量块201和第二质量块202在第一水平方向相对于平面运动组件3反向移动,充当反力引导机构,平面运动组件3在沿第二水平方向移动时,第三质量块203和第四质量块204在第二水平方向相对于平面运动组件3反向移动,充当反力引导机构,因此,该方案中的四个质量块可在x和y两个方向上抵消平面运动组件3在移动过程中产生的振动冲击影响,该两轴位移装置中的平面运动组件3在两个相互垂直的方向移动时均可通过质量块抵消振动冲击,即实现了二运动轴的反力引导。而且,本方案通过精简的结构即实现了二运动轴的反力引导以及抵消附加旋转力矩,在满足位移稳定性和精度的同时,降低了制造难度和成本。
68.如图2所示,平衡质量组件2还包括第一导向机构211、第二导向机构212、第三导向机构213和第四导向机构214;第一导向机构211包括第一导轨和第一移动部,第一导轨连接至支撑台1且沿第一水平方向延伸,第一移动部可滑动或滚动地和第一导轨配合,第一移动部和第一质量块201连接;第二导向机构212包括第二导轨和第二移动部,第二导轨连接至支撑台1且沿第一水平方向延伸,第二移动部可滑动或滚动地和第二导轨配合,第二移动部和第二质量块202连接;第三导向机构213包括第三导轨和第三移动部,第三导轨连接至支撑台1且沿第二水平方向延伸,第三移动部可滑动或滚动地和第三导轨配合,第三移动部和第三质量块203连接;第四导向机构214包括第四导轨和第四移动部,第四导轨连接至支撑台1且沿第二水平方向延伸,第四移动部可滑动或滚动地和第四导轨配合,第四移动部和第四质量块204连接。
69.采用上述导向机构,可以对相应的质量块进行引导,使质量块平稳顺畅滑动。并且,上述结构的导向机构均为机械导轨,这样无需依靠气压就可正常使用,所以该方案可适用于真空环境。本方案在大气环境及真空环境中均可使用,大大提高了位移装置的适用范围。本方案在实际应用时,只要是机械导轨的形式,都可以使用。
70.进一步地,上述位移装置还包括防漂组件,防漂组件设置在支撑台1上,防漂组件包括:第一防漂部,第一防漂部包括第一驱动电机511,第一驱动电机511的定子连接至支撑台1,第一驱动电机511的动子连接至第一质量块201在第一水平方向的一端;第二防漂部,第二防漂部包括第二驱动电机512,第二驱动电机512的定子连接至支撑台1,第二驱动电机512的动子连接至第二质量块202在第一水平方向的一端;第三防漂部,第三防漂部包括第三驱动电机513,第三驱动电机513的定子连接至支撑台1,第三驱动电机513的动子连接至
第三质量块203在第二水平方向的一端;第四防漂部,第四防漂部包括第四驱动电机514,第四驱动电机514的定子连接至支撑台1,第四驱动电机514的动子连接至第四质量块204在第二水平方向的一端。第一防漂部、第二防漂部、第三防漂部和第四防漂部分别对第一质量块201、第二质量块202、第三质量块203和第四质量块204起到安全限位作用和缓冲回复作用。
71.进一步地,第一防漂部还包括第一弹性机构521,第一弹性机构521的一端连接至第一质量块201在第一水平方向上的另一端,第一弹性机构521的另一端连接至支撑台1;第二防漂部还包括第二弹性机构522,第二弹性机构522的一端连接至第二质量块202在第一水平方向上的另一端,第二弹性机构522的另一端连接至支撑台1;第三防漂部还包括第三弹性机构523,第三弹性机构523的一端连接至第三质量块203在第二水平方向上的另一端,第三弹性机构523的另一端连接至支撑台1;第四防漂部还包括第四弹性机构524,第四弹性机构524的一端连接至第四质量块204在第二水平方向上的另一端,第四弹性机构524的另一端连接至支撑台1。
72.防漂部中的弹性机构会通过自身的弹性变形对对应的质量块施加一个向中心平衡点的力,这个力不受驱动电机通断电的影响,尤其在驱动电机断电后,会驱使质量块向中心平衡点附近移动,而不是随机的停留在行程边缘区域,从而有益于提升初始化效率。其中,弹性机构和质量块限位配合是指弹性机构设置在相应的质量块的移动路径上,初始位置时质量块和弹性机构之间有间隙,当质量块移动位置较大时与弹性机构抵接,这样弹性机构可限制质量块的移动范围,并且可对质量块施加与移动方向相反的弹力,以驱使平衡质量部向中心平衡点附近移动。
73.如图3所示,驱动组件302包括第五驱动电机312、第六驱动电机322、第七驱动电机332、第八驱动电机342、第九导向机构352和第十导向机构362;第五驱动电机312的定子相对第一质量块201固定,第五驱动电机312的动子连接至第九导向机构352的一端;第六驱动电机322的定子相对第二质量块202固定,第六驱动电机322的动子连接至第九导向机构352的另一端;第七驱动电机332的定子相对第三质量块203固定,第七驱动电机332的动子连接至第十导向机构362的一端;第八驱动电机342的定子相对第四质量块204固定,第八驱动电机342的动子连接至第十导向机构362的另一端;第九导向机构352沿第二水平方向延伸,第九导向机构352和运动台301配合,以带动运动台301沿第一水平方向移动,及在第二水平方向对运动台301导向;第十导向机构362沿第一水平方向延伸,第十导向机构362和运动台301配合,以带动运动台301沿第二水平方向移动,及在第一水平方向对运动台301导向。
74.其中,第五驱动电机312、第六驱动电机322、第七驱动电机332、第八驱动电机342为运动台301的移动提供动力,第九导向机构352在带动运动台301沿第一水平方向移动时,第十导向机构362为运动台301提供第一水平方向的导向,第十导向机构362在带动运动台301沿第二水平方向移动时,第九导向机构352为运动台301提供第一水平方向的导向。
75.进一步地,驱动组件302还包括第五导向机构3021、第六导向机构3022、第七导向机构3023和第八导向机构3024;第五导向机构3021包括第五导轨和第五移动部,第五导轨连接至第一质量块201且沿第一水平方向延伸,第五移动部可滑动或滚动地和第五导轨配合,第五移动部和第九导向机构352的一端连接;第六导向机构3022包括第六导轨和第六移动部,第六导轨连接至第二质量块202且沿第一水平方向延伸,第六移动部可滑动或滚动地和第六导轨配合,第六移动部和第九导向机构352的另一端连接;第七导向机构3023包括第
七导轨和第七移动部,第七导轨连接至第三质量块203且沿第二水平方向延伸,第七移动部可滑动或滚动地和第七导轨配合,第七移动部和第十导向机构362的一端连接;第八导向机构3024包括第八导轨和第八移动部,第八导轨连接至第四质量块204且沿第二水平方向延伸,第八移动部可滑动或滚动地和第八导轨配合,第八移动部和第十导向机构362的另一端连接。
76.通过第五导向机构3021、第六导向机构3022、第七导向机构3023和第八导向机构3024,可对第九导向机构352和第十导向机构362的移动进行导向,从而对运动台301进行导向,保证运动台301平稳移动。
77.其中,第五驱动电机312、第六驱动电机322、第七驱动电机332、第八驱动电机342、第五导向机构3021、第六导向机构3022、第七导向机构3023和第八导向机构3024等结构,沿支撑台1的周边设置,这样支撑台1留出的中部区域为运动台301的运动区域,使运动台301有较大的运动范围,有利于提高装置整体结构的紧凑性。
78.进一步地,平面运动组件3还包括连接架303,运动台301设置在连接架303上;第九导向机构352包括第一导梁3521和设置在第一导梁3521上的第九机械导轨3522,第一导梁3521和第九机械导轨3522均穿过连接架303,第九机械导轨3522和连接架303滑动连接;第十导向机构362和第九导向机构352在竖直方向间隔开,第十导向机构362包括第二导梁3621和设置在第二导梁3621上的第十机械导轨3622,第二导梁3621和第十机械导轨3622均穿过连接架303,第十机械导轨3622和连接架303滑动连接;第五驱动电机312的动子连接至第一导梁3521的一端,第六驱动电机322的动子连接至第一导梁3521的另一端;第七驱动电机332的动子连接至第二导梁3621的一端,第八驱动电机342的动子连接至第二导梁3621的另一端。
79.通过上述设置,第九导向机构352和第十导向机构362呈十字交叉状设置,这样可实现运动台301在两个相互垂直的方向的运行。在本实施例中,第一导梁3521的两侧分别设置一组第九机械导轨3522,第二导梁3621的两侧分别设置一组第十机械导轨3622,通过两组第九机械导轨3522和两组第十机械导轨3622可以保证运动台301的平稳运行。在一些其他的实施例中,第一导梁3521上也可以设置一组或者多组第九机械导轨3522,第二导梁3621上也可以设置一组或者多组第十机械导轨3622。
80.进一步地,第一质量块201包括第一主体2011和凸出设置在第一主体2011上的第一支梁2012,第一支梁2012沿第一水平方向延伸,第五驱动电机312的定子设置在第一主体2011上,第五导向机构3021的第五导轨设置在第一支梁2012上;第二质量块202包括第二主体2021和凸出设置在第二主体2021上的第二支梁2022,第二支梁2022沿第一水平方向延伸,第六驱动电机322的定子设置在第二主体2021上,第六导向机构3022的第六导轨设置在第二支梁2022上;第三质量块203包括第三主体2031和凸出设置在第三主体2031上的第三支梁2032,第三支梁2032沿第二水平方向延伸,第七驱动电机332的定子设置在第三主体2031上,第七导向机构3023的第七导轨设置在第三支梁2032上;第四质量块204包括第四主体2041和凸出设置在第四主体2041上的第四支梁2042,第四支梁2042沿第二水平方向延伸,第八驱动电机342的定子设置在第四主体2041上,第八导向机构3024的第八导轨设置在第四支梁2042上。
81.通过上述设置,便于第五驱动电机312、第六驱动电机322、第七驱动电机332、第八
驱动电机342、第五导向机构3021、第六导向机构3022、第七导向机构3023和第八导向机构3024的布置,并且保证了运动台301在移动时,能够将旋转角位移或运动冲击传递至平衡质量组件,从而抵消旋转角位移或运动冲击,提高运动台301的位移精度和稳定性。
82.进一步地,两轴位移装置10还包括功率放大器,用来驱动第一驱动电机511、第二驱动电机512、第三驱动电机513、第四驱动电机514、第五驱动电机312、第六驱动电机322、第七驱动电机332和第八驱动电机342的线圈阵列的电流,以和磁体阵列作用,至少可以引起平衡质量组件产生沿第一水平方向和第二水平方向上的位移,以及引起平面运动组件3产生沿第一水平方向和第二水平方向上的长距离位移。
83.如图4所示,第五驱动电机312和第六驱动电机322的动子线圈阵列通入电流后,与定子磁体阵列作用,产生一个沿第一水平方向x的洛伦兹力,作用在第九导向机构352上,并通过第九导向机构352作用在运动台301上,推动运动台301沿第一水平方向发生位移;同时,洛伦兹力的反力作用于第一质量块201和第二质量块202上,并推动第一质量块201和第二质量块202分别沿第一水平方向与运动台301反方向发生位移。
84.第一质量块201沿第一水平方向发生偏离中心平衡点位置的位移,触发第一防漂部的应激反应,导致第一弹性机构521(图4中未示出)中的弹性体的压缩量或伸长量发生变化,产生一个与第一质量块201的偏移方向相反方向的推力,引起第一质量块201发生向中心平衡点位置运动回复的趋势;与此同时,第一驱动电机511的动子线圈阵列通入电流,与定子磁体阵列作用,产生一个沿第一水平方向的洛伦兹力,作用在第一质量块201上,推动第一质量块201产生向中心平衡点位置的缓慢地运动回复趋势,缓缓阻止第一质量块201的进一步偏离位移,或缓缓推动第一质量块201向中心平衡点位置的回复运动。
85.同样的,第二质量块202沿第一水平方向发生偏离中心平衡点位置的位移,触发第二防漂部的应激反应,导致第二弹性机构522(图4中未示出)中的弹性体的压缩量或伸长量发生变化,产生一个与第二质量块202的偏移方向相反方向的推力,引起第二质量块202发生向中心平衡点位置运动回复的趋势;与此同时,第二驱动电机512的动子线圈阵列通入电流,与定子磁体阵列作用,产生一个沿第一水平方向的洛伦兹力,作用在第二质量块202上,推动第二质量块202产生向中心平衡点位置的缓慢地运动回复趋势,缓缓阻止第二质量块202的进一步偏离位移,或缓缓推动第二质量块202向中心平衡点位置的回复运动。
86.结合图5所示,平面运动组件3的运动台301的质量为m1,第九导向机构352的质量为m2,第一质量块201的质量为m1,第二质量块202的质量为m2,平面运动组件3偏离沿第一水平方向的中心线的距离为l1,第一质量块201与第二质量块202之间的跨距为l1,平面运动组件3沿第一水平方向上发生位移x,相应地,第一质量块201沿第一水平方向x的反冲位移为x1,第二质量块202沿第一水平方向x的反冲位移为x2,根据动量定理和力平衡定理计算得到以下公式:
87.m1*x+m2*x=m1*x1+m2*x2;
88.[(1-l1/l1)m1*x+m2*x]/2=m1*x1;
[0089]
[(1+l1/l1)m1*x+m2*x]/2=m2*x2。
[0090]
因此,由平面运动组件3偏离沿第一水平方向的中心线的运动位移所引起的在rz方向上的偏转角位移t1(弧度),其中,m1=m2,由以上公式可以得出:
[0091]
t1=(x
2-x1)/l1=m1*x*l1/(m1*l1*l1)。
[0092]
则从上述公式中,可以发现平面运动组件3偏离第一水平方向中心线沿第一水平方向移动在rz方向上的旋转角位移t1,被转化为第一质量块201和第二质量块202在第一水平方向上的直线位移差。
[0093]
如图6所示,第七驱动电机332和第八驱动电机342的动子线圈阵列通入电流后,与定子磁体阵列作用,产生一个沿第二水平方向的洛伦兹力,作用在第十导向机构362上,并通过第十导向机构362作用在运动台301上,推动运动台301沿第二水平方向发生位移;同时,洛伦兹力的反力作用于第三质量块203和第四质量块204上,推动第三质量块203和第四质量块204分别沿第二水平方向与运动台301反方向发生位移。
[0094]
第三质量块203沿第二水平方向发生偏离中心平衡点位置的位移,触发第三防漂部的应激反应,导致第三弹性机构523(图6中未示出)中的弹性体的压缩量或伸长量发生变化,产生一个与第三质量块203的偏移方向相反方向的推力,引起第三质量块203发生向中心平衡点位置运动回复的趋势;与此同时,第三驱动电机513(图6中未示出)的动子线圈阵列通入电流,与定子磁体阵列作用,产生一个沿第二水平方向的洛伦兹力,作用在第三质量块203上,推动第三质量块203产生向中心平衡点位置的缓慢地运动回复趋势,缓缓阻止第三质量块203的进一步偏离位移,或缓缓推动第三质量块203向中心平衡点位置的回复运动。
[0095]
同样的,第四质量块204沿第二水平方向发生偏离中心平衡点位置的位移,触发第四防漂部的应激反应,导致第四弹性机构524(图6中未示出)中的弹性体的压缩量或伸长量发生变化,产生一个与第四质量块204的偏移方向相反方向的推力,引起第四质量块204发生向中心平衡点位置运动回复的趋势;与此同时,第四驱动电机514(图6中未示出)的动子线圈阵列通入电流,与定子磁体阵列作用,产生一个沿第二水平方向的洛伦兹力,作用在第四质量块204上,推动第四质量块204产生向中心平衡点位置的缓慢地运动回复趋势,缓缓阻止第四质量块204的进一步偏离位移,或缓缓推动第四质量块204向中心平衡点位置的回复运动。
[0096]
通过平衡质量组件2的反力引导作用,根据动量定理与四个质量块和平面运动组件3的质量比,将平面运动组件3的大行程位移转化为质量块的小行程位移,在位移装置的内部实现运动的反冲和缓冲的消化,极大削弱了平面运动组件3在第一水平方向和第二水平方向上运动过程中对支撑台1产生的振动干扰影响,提高位移装置整体运动的稳定性和定位精度。
[0097]
通过平衡质量组件2的反力引导作用组合,可以将平面运动组件3在位移过程中,引起的平衡质量组件在竖直方向上产生的旋转角位移rz,转化为第一质量块201和第二质量块202在第一水平方向x上的直线位移或者位移差,或者转化为第三质量块203和第四质量块204在第二水平方向上的直线位移或者位移差;实现了rz方向上的运动反冲和缓冲的消化效果,极大削弱了平面运动组件3运动过程中在rz方向上对支撑台1产生的振动干扰影响,提高位移装置整体运动的稳定性和定位精度。
[0098]
如图7所示,平面运动组件3的运动台301的质量为m1,第十导向机构362的质量为m3,第三质量块203的质量为m3,第四质量块204的质量为m4,平面运动组件3偏离沿第二水平方向的中心线的距离为l2,第三质量块203与第四质量块204之间的跨距为l2,平面运动组件3沿第二水平方向上发生位移y,相应的第三质量块203沿第二水平方向的反冲位移为y1,第
四质量块204沿第二水平方向的反冲位移为y2,根据动量定理和力平衡定理计算得到以下公式:
[0099]
m1*y+m3*y=m3*y1+m4*y2;
[0100]
[(1-l2/l2)m1*y+m3*y]/2=m3*y1;
[0101]
[(1+l2/l2)m1*y+m3*y]/2=m4*y2。
[0102]
因此,由平面运动组件3偏离沿第二水平方向的中心线的运动位移所引起的在rz方向上的偏转角位移t2(弧度),其中,m3=m4,由以上公式可以得出:
[0103]
t2=(y
2-y1)/l2=m1*y*l2/(m3*l2*l2)。
[0104]
则从上述公式中,可以发现平面运动组件3偏离第二水平方向中心线沿第二水平方向的移动在rz方向上的旋转角位移t2,被转化为第三质量块203和第四质量块204在第二水平方向上的直线位移差。
[0105]
实施例二
[0106]
结合图8和图9所示,本实施例的两轴位移装置10与实施例一相比,仅在于平衡质量组件2的结构有所不同。具体地,本实施例中,第一质量块201还与第一主体2011相互连接的第一连接板2013,第二质量块202还包括与第二主体2021相互连接的第二连接板2023,第三质量块203还包括与第三主体2031相互连接的第三连接板2033,第四质量块204还包括与第四主体2041相互连接的第四连接板2043;第一连接板2013、第二连接板2023均与第三连接板2033、第四连接板2043在竖直方向间隔开;平衡质量组件2还包括第十一导向机构205和第十二导向机构206,第十一导向机构205沿第一水平方向延伸,第十二导向机构206沿第二水平方向延伸;第一连接板2013和第二连接板2023通过第十一导向机构205滑动连接,第三连接板2033和第四连接板2043通过第十二导向机构206滑动连接。
[0107]
其中,第一质量块201、第二质量块202、第三质量块203和第四质量块204之间,在运动过程中始终无干涉或碰撞,且都与平面运动组件3无干涉或碰撞。
[0108]
相比较实施例一,该实施例中第一质量块201、第二质量块202、第三质量块203和第四质量块204分别在水平向上进行了延伸拓展,同时增加了第十一导向机构205和第十二导向机构206,既合理利用了平面运动组件3下方的闲置空间用来增大四个质量块的体积和质量,又部分抵消了第一质量块201和第二质量块202之间因质心与受力点偏置所引起的偏转力矩,及第三质量块203和第四质量块204之间因质心与受力点偏置所引起的偏转力矩。
[0109]
以上的偏转力矩,从第一质量块201的角度来看,既包括第一质量块201的质心与第一导向机构211的支撑点之间由于重力因素在竖立面上形成的重力弯矩,又包括第一质量块201的质心与第五驱动电机312的出力轴之间由于加减速惯性因素在水平面上形成的惯性扭矩;同样的,第二质量块202、第三质量块203、第四质量块204的偏转力矩,也包括各自的在竖立面上的重力弯矩和水平面上的惯性扭矩。
[0110]
以上的抵消偏转力矩的作用,从第一质量块201的角度来看,就是第一质量块201和第二质量块202之间通过第十一导向机构205相互作用,在竖立面上提供一个与第一质量块201所受重力弯矩大小相等、方向相反的力矩,在水平面上由于第一质量块201、第二质量块202运动加速度方向相同、大小几乎相等引起的两个方向相反的惯性扭矩在连接的第十一导向机构205处相互抵消或者部分抵消;同样的,第二质量块202、第三质量块203、第四质量块204的抵消偏转力矩的作用,类似于第一质量块201。
[0111]
实施例三
[0112]
如图10所示,本实施例两轴位移装置10与实施例一相比,在于支撑台1结构的不同,以及增加了重力补偿部。具体地,本实施例中,支撑台1还包括底座101和设置在底座101上的凸台102,第一导向机构211、第二导向机构212、第三导向机构213和第四导向机构214均设置在底座101上;位移装置还包括重力补偿部,重力补偿部设置在凸台102上,重力补偿部与平面运动组件3的下侧配合,以抵消平面运动组件3的至少一部分重力。通过设置重力补偿部,可抵消平面运动组件3的至少一部分重力,尤其是用来抵消运动台301的重力,这样可避免由于重力造成的影响,提高了运动台301运动过程中在竖直方向的位置精度和稳定性,使位移装置的运动更加精确平稳。
[0113]
进一步地,在本实施例中,重力补偿部为气浮单元61,气浮单元61包括气浮垫611和气浮面板612,气浮垫611设置在运动台301的下侧,气浮面板612设置在凸台102上。
[0114]
气浮单元61主要起到重力补偿的作用,通过气浮垫611与气浮面板612之间气膜刚度的支撑力,抵消全部或部分平面运动组件3尤其是运动台301的重力,降低第十导向机构362和第九导向机构352因受重力产生弯曲变形的影响,提高运动台301运动过程中在竖直方向的位置精度和稳定性。
[0115]
相比较实施例一或实施例二,该实施例中增加了气浮单元61,能够对平面运动组件3起到重力补偿的作用,消除重力变形带来的影响;由于气浮单元61需要通入正压气体,采用气浮单元61做重力补偿方式的位移装置,不能应用于真空工况环境下,因此,这一定程度上限制了该实施例的应用范围。
[0116]
实施例四
[0117]
结合图11和图12所示,本实施例两轴位移装置10与实施例二相比,在于平衡质量组件2和支撑台1的结构有所不同,以及增加了重力补偿部。具体地,本实施例中,第一连接板2013为具有第一凹槽的u型结构,第二连接板2023为具有第二凹槽的u型结构,第一凹槽和第二凹槽对接组成第一避让孔207;第三连接板2033为具有第三凹槽的u型结构,第四连接板2043为具有第四凹槽的u型结构,第三凹槽和第四凹槽对接组成第二避让孔208;支撑台1包括底座101和设置在底座101上的凸台102,凸台102设置在第一避让孔207和第二避让孔208内。通过上述设置,可使凸台102靠近运动台301,便于在凸台102和运动台301之间设置其他配合结构。
[0118]
进一步地,凸台102和运动台301之间设置有重力补偿部,本实施例中,重力补偿部为磁力单元62,磁力单元62包括第一磁体阵列621和第二磁体阵列622,第一磁体阵列621设置在运动台301的下侧,第二磁体阵列622设置在凸台102上,第一磁体阵列621和第二磁体阵列622相互排斥。这样通过第一磁体阵列621和第二磁体阵列622的相互排斥对运动台301施加向上的作用力,从而抵消运动台301的重力。
[0119]
其中,在平面运动组件3的整个运动过程中,第一磁体阵列621在凸台102的上表面上的投影始终与第二磁体阵列622重合,以保证第一磁体阵列621与第二磁体阵列622之间排斥力大小的稳定。
[0120]
其中,凸台102的上表面优选为是和底座101的上表面平行的面,并且凸台102的上表面高于底座101的上表面,这样运动台301的重心与平面运动组件3的驱动电机的出力平面距离近,控制精度更高。
[0121]
该实施例中的重力补偿方式采用了磁力单元62,采用这种磁浮重力补偿的方式,实现了位移装置在真空工况下的应用;同时,由于第一磁体阵列621与第二磁体阵列622之间存在着较大的磁浮间隙,因此降低了制造和安装的难度,提高了维护和使用的便利性。
[0122]
具体地,磁力单元62分别穿过第一凹槽和第二凹槽、第三凹槽和第四凹槽;在平面运动组件3的整个运动过程中,第一磁体阵列621在凸台102的投影始终与第一凹槽和第二凹槽或第三凹槽和第四凹槽的轮廓线无交集,以保证第一磁体阵列621与第一质量块201和第二质量块202或第三质量块203和第四质量块204之间不发生碰撞,抑或是第一质量块201和第二质量块202或第三质量块203和第四质量块204与支撑台1之间不发生撞击。
[0123]
通过本实用新型提供的技术方案,至少可产生以下有益效果:
[0124]
本实用新型提供的技术方案,通过将一个方向上运动引起的旋转力矩,分别作用到两个质量块上,且两个质量块的运动方向相互平行且具有一定的跨距,达到了旋转力矩分解为一对力偶作用,将旋转方向上的角动量守恒问题转化为直线方向上的动量守恒问题,相比现有技术,解决了旋转方向上的角动量不守恒问题,提高了位移装置的运动测量控制的解算能力。
[0125]
本实用新型提供的技术方案,通过四个质量块的结构布置形式,每个水平方向上均分布两个质量块,每个质量块对应的导向机构均可以采用机械导轨,相比现有技术,既解决了两个水平方向上的反力引导作用,也解决了旋转方向上的反力引导作用,同样也保证了位移装置在真空工况下的适用性、高速高加速运动的可行性。
[0126]
本实用新型提供的技术方案,通过平面运动组件的驱动电机分别作用到其中一个质量块的设计,通过平面运动组件偏离运动中心轴线的偏置力矩分解为两侧驱动电机的出力力差,形成一对力偶作用,取代旋转力矩作用,将旋转方向的角位移转化为直线上的线性位移或位移差,从而解决掉因旋转角位移或旋转振动带来的干扰问题。
[0127]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1