一种利用激光测距辅助校准的可视化异物清除装置的制作方法
1.本实用新型涉及高压输电技术领域,尤其涉及一种利用激光测距辅助校准的可视化异物清除装置。
背景技术:
2.电力系统稳定运行在当今社会具有极其重要的意义,由此,也对保护作为构筑电力系统网络框架的输电线路提出了更高的要求。输电线路正常运行时,各个导线其间都留有相应的安全间距,以防止线间放电造成线路短路故障。但是在大风、台风等天气情况下,输电线路沿线的网纱、塑料薄膜、风筝线等易飘物存在被吹挂到输电线路上的风险性,这些悬挂、缠绕在输电线路上的异物,尤其是在经过雨雪等天气受潮后,极易引发线路短路故障。随着输电线路的不断增加,架空线路的维护技术手段也不断进步。随着激光技术的发展与运用,目前运用激光异物清除器来处理输电线路异物已经成为线路维护的主要方法,避免了复杂的登杆作业,实现了远程、非接触式带电作业,安全简便。目前大多数的利用激光清除异物的装置采用人工控制对异物进行对准或者利用摄像装置对异物进行识别后利用激光清除,但是均存在由于机器对二维影像识别的局限性导致清除装置与异物之间的距离不能被确定从而使激光无法精确对准,清除效率低下。
3.例如,在中国专利文献上公开的“一种基于输电线路异物激光清理机及异物清理方法”,其公开号为“cn111313325a”, 通过地面云台瞄准系统瞄准目标异物,激光控制系统发射激光,激光通过远程光学聚焦系统在异物表面聚焦,使异物吸收激光瞬间高能量后,温度急剧升高后熔化或者气化,从而异物坠落,达到远程异物清除的目的;由于没有测距功能参与辅助异物定位,无法根据实际情况调节激光功率以及位置,导致异物清除效果不好。
技术实现要素:
4.本实用新型是为了解决现有技术没有测距功能参与辅助异物定位,无法根据实际情况调节激光功率以及位置,导致异物清除效果不好的问题,提出一种利用激光测距辅助校准的可视化异物清除装置,包括激光发射器,固定柱,所述激光发射器与固定柱固定连接,所述固定柱的一端设置有激光测距仪,所述激光发射器与设置在固定柱的同侧;还包括环境采集相机,所述环境采集相机与所述固定柱固定连接,所述环境采集相机于激光测距仪设置在固定柱的同侧。增加激光测距功能,并运用此功能增强设备异物识别的精确程度,以及实现设备根据异物距离实现激光功率自我调节的实现方法,进一步增强激光异物清除器的功能,提高异物清除的效率。通过摄像机进行异物图像的采集,在对采集的图像预处理后进行图像识别,根据激光测距系统进行测距判定,若不符合合理距离,则通过伺服机构对摄像机方向角度进行校准,若符合要求,则线路异物施行跟踪处理,实现异物清除。
5.作为优选,激光发射器的一端设置有激光准直器,所述激光准直器至少包括两片光学镜片。激光准直器可以将激光发射器发射的激光聚焦为更小的点,能够更好地利用激光能量。
6.作为优选,激光发射器的一侧设置有冷却器,所述冷却器用于为激光发射器降温。由于激光发射器在发射高能激光射线的时候会产生高温,而且异物清除装置上的其他设备与激光发射器之间的距离较为紧凑,若无法有效降温会导致故障率高甚至损毁。
7.作为优选,还包括转台,所述转台与固定柱的下端通过转轴连接。转台包括俯仰转轴和方位转轴,能实现带动激光发射器、激光测距仪以及环境采集相机在各个方向转动,及时捕捉异物,即使异物在外界扰动下运动也可以精准捕捉。
8.作为优选,还包括电机,用于驱动转台调整俯仰角和方位角。
9.作为优选,还包括控制器,所述控制器用于接收所述环境采集相机以及激光测距仪的信息,输出控制信号给电机控制俯仰角以及方位角。环境采集相机内置的处理芯片会对环境数据进行初步处理,激光测距仪将与异物间的距离输出,控制器接收二者的信号后对异物的位置信息进行识别后输出控制信号给电机,通过电机控制转台,使可视化异物清除装置跟踪异物。
10.作为优选,还包括电源,所述电源采用直流电源,用于为激光发射器、激光测距仪、环境采集相机以及电机供电。
11.有益效果:1.利用激光测距仪对异物清除装置的辅助校准,能提高异物清除的效率。
12.2.通过设置冷却器,降低异物清除装置的故障几率,降低维护成本。
13.3.转台能够实现异物清除装置在纵向和横向的灵活运动,有利于跟踪运动的异物,提高清理效果。
附图说明
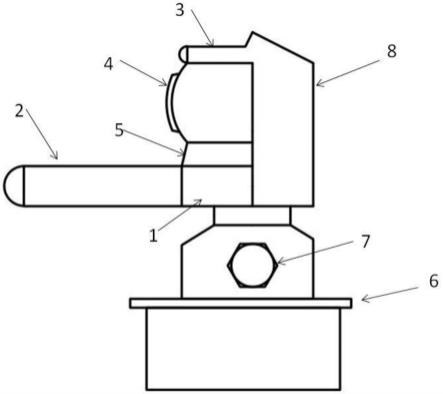
14.图1是本实用新型一种利用激光测距辅助校准的可视化异物清除装置的结构示意图;
15.图中,1.激光发射器;2.激光准直器;3.激光测距仪;4.环境采集相机;5.冷却器;6.转台;7.转轴;8.固定柱。
具体实施方式
16.如图1所示,一种利用激光测距辅助校准的可视化异物清除装置包括激光发射器1,固定柱8,固定柱8的一侧固定连接有激光测距仪3、环境采集相机4和激光发射器1。通过增加激光测距功能,并运用此功能增强设备异物识别的精确程度,以及实现设备根据异物距离进行激光功率自我调节,进一步增强激光异物清除器的功能,提高异物清除的效率。通过摄像机进行异物图像的采集,在对采集的图像预处理后进行图像识别,根据激光测距仪进行测距判定,若不符合合理距离,则通过电机控制转台6对异物清除装置的方向角度进行校准,若符合要求,则线路异物施行跟踪处理,实现异物清除。
17.激光发射器1的一端设置有激光准直器2,激光准直器2至少包括两片光学镜片,激光准直器可以将激光发射器1发射的激光聚焦为更小的点,能够更好地利用激光能量。
18.激光发射器1的一侧设置有冷却器5,冷却器5用于为激光发射器降温。由于激光发射器在发射高能激光射线的时候会产生高温,而且异物清除装置上的其他设备与激光发射器之间的距离较为紧凑,若无法有效降温会导致故障率高甚至损毁。
19.还包括转台6,转台6与固定柱8的下端通过转轴连接。转台6包括俯仰转轴和方位转轴,能实现带动激光发射器1、激光测距仪3以及环境采集相机4在各个方向转动,及时捕捉异物,即使异物在外界扰动下运动也可以精准捕捉。
20.还包括电机,用于驱动转台调整俯仰角和方位角。
21.还包括控制器,控制器用于接收环境采集相机4以及激光测距仪3的信息,输出控制信号给电机控制俯仰角以及方位角。环境采集相机4内置的处理芯片会对环境数据进行初步处理,激光测距仪3将与异物间的距离输出,控制器接收二者的信号后对异物的位置信息进行识别后输出控制信号给电机,通过电机控制转台,使可视化异物清除装置跟踪异物。
22.另外,还设置有直流电源,用于为激光发射器、激光测距仪、环境采集相机以及电机供电。
23.工作原理:环境采集相机4采集到线路图像信息后经过内置的处理芯片识别出是否有异物存在,若存在异物,则执行下列操作:根据环境采集相机4采集的信息解算出激光测距仪发射的激光点与异物目标之间的偏差,产生方位轴需要运动的角度指令信号;控制器根据解算后的指令信号以及方位轴测量到的实际角度信息,求解出偏差信号,然后根据内置控制律计算控制量,并输出驱动电机控制转台6运转至消除角度偏差,准确指向目标,激光发射器发射高能激光将异物清除。俯仰轴控制原理与方位轴相似。同时对方位轴和俯仰轴进行闭环控制,确保目标位置发生变化的情况下,转台6可以根据图像处理结果进行快速响应,及时漂浮异物在外界扰动下运动也可以很好的清除目标。
24.激光测距仪3在激光异物清除器中的加入能有效提高异物清除器的可视化准确精度,采用测量异物的距离作为视觉识别的辅助判定条件,通过摄像机进行异物图像的采集,在对采集的图像预处理后进行图像识别,根据激光测距系统进行测距判定,若不符合合理距离,则通过转台对摄像机方向角度进行校准,若符合要求,则线路异物施行跟踪处理,实现异物清除。
25.此外,激光测距仪3输出的距离信息经过控制器后,根据预设的程序输出相应的控制信号来控制激光发射器1发射的激光功率,适应不同距离下的工作,能够节省功率,同时保护线路。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1