一种机器人充电桩的制作方法
1.本技术涉及机器人的技术领域,尤其是涉及一种机器人充电桩。
背景技术:
2.随着科技的不断发展,越来越多的机器人被应用的各行各业当中,很多机器人可以代替人力进行一些较为繁琐的工作,智能机器人的发展使得对人力资源的依赖有所减轻,提高了工作人员的工作效率。
3.过去的机器人普遍使用自身的电池进行对机器人的供电,当电池的电量耗尽时,需要对机器人内部的电池进行更换,这就需要人工去操作,提高了操作人员的工作量,后续又开发了专用于机器人的充电桩,机器人在没电时可以自动去往充电桩上补偿电量,但应用于机器人的充充电桩又与例如电动汽车的充电桩有所不同,当一个充电区域的若干充电桩上已经有多个充电桩被占用时,司机可以通过自身判断去寻找相对应的充电位置,但机器人则需要经过人为引导才能找到空闲的充电桩进行充电。
技术实现要素:
4.为了使机器人自动前往空闲的充电桩进行充电,本技术提供一种机器人充电桩。
5.本技术提供的一种机器人充电桩,采用如下的技术方案:
6.一种机器人充电桩,包括桩体,所述桩体上设置有用于给机器人进行充电的充电端口,所述桩体内设置有电源电路、供电模块、主控模块和无线模块,所述供电模块用于提供充电的电能,所述电源电路连接于所述供电模块以接收电能,所述电源电路与所述充电端口电连接,以通过所述充电端口将用于充电的电能进行输出,所述主控模块连接于所述电源电路,所述主控模块用于监测所述电源电路是否通过所述充电端口进行充电,并发送充电状态信号;所述无线模块连接于所述主控模块以接收所述充电状态信号并转送为无线信号,所述无线信号带有唯一编码。
7.通过采用上述技术方案,一般一个充电区域内包含有多个充电桩,当机器人需要充电时,机器人通过无线信号进行广播,多个充电桩接收到无线信号,主控模块监测自身的电源电路是否处于充电状态,若不处于充电状态,则无线模块无线发送一个无线信号,而这个无线信号具有代表自身的唯一编码,机器人接受到带有唯一编码的无线信号而自动找到空闲的充电桩进行充电,以此使机器人自动前往空闲的充电桩进行充电,无需操作人员人工去为机器人找到合适的充电桩,快捷且方便。
8.优选的,所述供电模块包括220vac端口和电源适配器,所述220vac端口用于接收市电中的220v交流电,所述电源适配器一端连接于220vac端口,另一端连接于所述电源电路,所述电源适配器用于将220v交流电适配成所述电源电路工作所需的电压大小。
9.通过采用上述技术方案,通过220vac接收市电中的220v交流电,电源适配器将220v交流电适配成共电源电路工作所需的电压大小。
10.优选的,还包括电压检测适配单元,所述电压检测适配单元一端连接于所述电源
电路,另一端连接于所述充电端口,所述电压检测适配单元用于检测不同机器人的充电电压,并发送电压信号至电源电路,电源电路接收到电压信号,并根据电压信号匹配不同电压的充电输出值。
11.通过采用上述技术方案,电压检测适配单元检测机器人的充电电压,并将电压信号发送至主控模块,主控模块匹配与充电电压相匹配的充电输出值给不同的机器人进行充电,实现一个充电桩可以给不同种类、不同充电电压的机器人进行充电,更加灵活 。
12.优选的,所述主控模块上连接有状态显示模块,所述状态显示模块从所述主控模块上获取所述电源电路的充电状态信号,并将充电状态进行显示。
13.通过采用上述技术方案,状态显示模块用于显示电源电路是否在进行充电,并把充电和不充电通过不同的显示方法进行显示,以直观的告诉操作人员此充电桩的工作状态。
14.优选的,所述状态显示模块包括第一三极管q1、第一继电器km1和发光件,所述第一三极管q1的基极连接于所述主控模块以接收充电状态信号,所述第一三极管q1的集电极连接于所述第一继电器km1的线圈,所述第一三极管q1的发射极接地,所述第一继电器km1的常开触点km1-1连接于所述发光件。
15.优选的,所述电源电路上连接有温度检测件、报警电路和报警件,所述温度检测件与所述报警电路电连接,所述温度检测件用于检测桩体的温度,并输出温度信号,所述报警电路接收温度信号,并根据温度信号控制报警件的通断。
16.通过采用上述技术方案,温度检测件检测桩体的温度,当温度过高时,报警电路控制报警件进行报警,以此提醒操作人员前往桩体进行维护。
17.优选的,所述桩体上设置有锁定机构,所述锁定机构用于使机器人在桩体上充电时保持锁定状态。
18.通过采用上述技术方案,设置锁定机构可以使机器人在桩体上进行充电时不会从桩体上脱出而使充电中断。
19.优选的,所述锁定机构包括磁吸件,所述磁吸件固定连接于所述桩体上,且所述磁吸件与所述机器人相对应设置。
20.综上所述,本技术至少包括有益技术效果:
21.一般一个充电区域内包含有多个充电桩,当机器人需要充电时,机器人通过无线信号进行广播,多个充电桩接收到无线信号,主控模块监测自身的电源电路是否处于充电状态,若不处于充电状态,则无线模块无线发送一个无线信号,而这个无线信号具有代表自身的唯一编码,机器人接受到带有唯一编码的无线信号而自动找到空闲的充电桩进行充电,以此使机器人自动前往空闲的充电桩进行充电,无需操作人员人工去为机器人找到合适的充电桩,快捷且方便。
附图说明
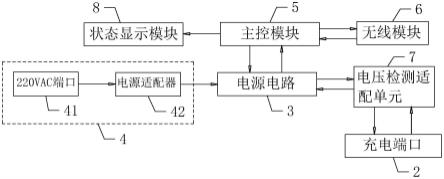
22.图1是本技术实施例的整体模块连接示意图;
23.图2是本技术实施例中桩体的简易示意图;
24.图3是本技术实施例中状态显示模块的电路连接示意图;
25.图4是本技术实施例中报警电路的电路连接示意图。
26.附图标记说明:1、桩体;2、充电端口;3、电源电路;4、供电模块;41、200vac端口;42、电源适配器;5、主控模块;6、无线模块;7、电压检测适配单元;8、状态显示模块;81、发光件;9、温度检测件;10、报警电路;11、报警件;12、锁定机构;121、磁吸件。
具体实施方式
27.以下结合附图1-4对本技术作进一步详细说明。
28.本技术实施例公开一种机器人充电桩。
29.如图1和图2所示,一种机器人充电桩包括桩体1、充电端口2、电源电路3、供电模块4、主控模块5和无线模块6。
30.充电端口2固定连接于桩体1,充电端口2用于与机器人进行插接以给机器人进行充电。充电端口2可以突出于桩体1设置,也可以设置成凹陷状态,只需与机器人相匹配以实现充电功能即可。
31.供电模块4设置在桩体1内,供电模块4用于提供给机器人充电的电能。供电模块4包括220vac端口41和电源适配器42。220vac端口41用于接收市电中的220v交流电。电源适配器42一端连接于220vac端口41,另一端连接于电源电路3,电源适配器42用于将220v交流电适配转化为电源电路3工作所需的电压大小。如电源适配器42将220v交流电转化为24v直流电、将220v交流电转化为12v的直流电等等。
32.电源电路3连接于供电模块4以接收充电的电能,电源电路3与充电端口2电连接,电源电路3将电筒通过充电端口2进行输出。
33.主控模块5连接于电源电路3,主控模块5用于监测电源电路3是否通过充电端口2进行充电,并发送充电状态信号。主控模块5可以使用充电专用的mcu单片机芯片,端口对电源电路3进行监测,监测到电源电路3正在给机器人充电,主控模块5便输出高电平的充电状态信号,当监测到电源电路3没有进行充电时,则输出低电平的充电状态信号。
34.如图1和图2所示,无线模块6连接于主控模块5以接收充电状态信号,并将充电状态信号转换为无线信号并进行发送,这个无线信号带有唯一编码。在本实施例中,无线模块6为发送wifi的无线通信模块,每一个wifi信号皆包含有其相对应且具有唯一性的bssid,它是一个长度为48位的二进制标识符,用来识别不同的wifi无线信号。可以通过这一个bssid,可以使每一个充电桩都具有唯一的id。
35.一般在一个充电区域内设置有多个充电桩,当机器人需要充电时,机器人通过wifi信号进行广播,这时多个充电桩接收到机器人发出的wifi信号,每个充电桩的主控模块5监测自身的电源电路3是否在进行充电,当电源电路3进行充电时,主控信号输出高电平的充电状态信号,无线模块6输出高电平的无线信号,机器人接收到高电平的无线信号得知该充电桩有机器人在充电;当其中一个充电桩上没有机器人进行充电时,其桩体1内的主控模块5发出低电平的充电状态信号,无线模块6转送出低电平的无线信号,机器人接收到低电平的无线信号后,根据无线信号内的唯一编码找到相对应的充电桩,并前往这个充电桩进行充电,以此使机器人自动前往空闲的充电桩进行充电,无需操作人员人工去为机器人找到合适的充电桩,快捷且方便。
36.如图1和图2所示,还包括电压检测适配单元7一端连接于电源电路3,另一端连接于充电端口2,电压检测适配单元7用于检测不同机器人的充电电压,并发送电压信号至电
源电路3,电源电路3接受到电压信号并根据电压信号匹配不同的电压输出值。
37.当机器人连接至桩体1上的充电端口2上后,电压检测适配单元7先检测机器人的充电电压以获取电压信号,并将电压信号发送至电源电路3,电源电路3将电压信号转送至主控模块5,主控模块5根据电压信号匹配相应的充电电压,并将匹配的充电电压输出至机器人上以此完成不同电压值的充电。使用常用的具有电压检测适配功能的电路即可。
38.如图1和图2所示,主控模块5上连接有状态显示模块8,状态显示模块8从主控模块5上获取电源电路3的充电状态信号,并将充电状态进行显示。如当电源电路3正在在机器人进行充电时,状态显示模块8显示一个状态,工作人员可以通过观察状态显示模块8的这个状态以得知该充电桩正在进行充电,这里显示的状态可以是视觉状态,如:发光、显示屏显示等等,也可以为听觉状态,如:蜂鸣、警报等等。
39.如图1和图3所示,进一步的,在本实施例中,状态显示模块8包括第一三极管q1、第一继电器km1和发光件81。
40.第一三极管q1为npn型三极管,第一三极管q1的基极连接于主控模块5以接收充电状态信号,第一三极管q1的集电极连接于第一继电器km1的线圈,第一三极管q1的发射极接地。
41.第一继电器km1的线圈连接于第一三极管q1的集电极,第一继电器km1的常开触点km1-1连接于发光件81,以控制发光件81的通断。
42.当电源电路3对机器人进行充电时,主控模块5监测到电源电路3正在进行充电,故输出高电平信号至第一三极管q1的基极,第一三极管q1的基极接收高电平信号而饱和导通,第一三极管q1导通使得第一继电器km1导通,第一继电器km1的常开触点km1-1闭合,发光件81得电开始发光,以此提示操作人员这个充电桩处于充电状态;反之每当电源电路3没有对机器人进行充电时,主控模块5监测到电源电路3没有进行充电,故输出低电平信号至第一三极管q1的基极,第一三极管q1的基极接收到低电平信号而保持关断状态,第一继电器km1无法导通,第一继电器km1的常开触点包括断开的状态,发光件81不发光,以此提示操作人员这个充电桩不处于充电状态。
43.在另一个实施例中,与上述设置不同的是,第一继电器km1-1上的是常闭触点km1-1,相应的,在本实施例中,当电源电路3进行充电时,主控模块5仍然发送高电平信号,但发光件81不发光;当电源电路3没有进行充电时,主控模块5仍然发送低电平信号,发光件81发光。
44.其中发光件81还可以换成蜂鸣器、数码管显示屏等等,只需能使操作人员在电源电路3充电和不充电两个情况下能得到其两种不同的状态即可。
45.如图1和图4所示,电源电路3上连接有温度检测件9、报警电路10和报警件11,温度传感器与报警电路10电连接,温度传感器用于检测桩体1的温度并输出相应的温度信号,报警电路10接收温度信号,并根据温度信号控制报警件11的通断。
46.温度检测件9在本实施例中为温度传感器,温度传感器可以设置在桩体1内用于测量桩体1的温度。
47.报警电路10包括第一比较器u1、第一电阻r1、第二电阻r2、第二三极管q2和第二继电器km2。第一电阻r1的一端连接于vcc,另一端连接于第二电阻r2,第二电阻r2的另一端接地。第一电阻r1和第二电阻r2的节点连接于第一比较器u1的反向输入端,第一比较器u1的
同相输入端连接于温度传感器以接收温度信号,第一比较器u1的输出端连接于第二三极管q2的基极。
48.第二三极管q2的基极连接于第一比较器u1的输出端,第二三极管q2的集电极连接于第二继电器km2的线圈,第二三极管q2的发射极接地。
49.第二继电器km2的线圈连接于第二三极管q2的集电极,第二继电器km2的常开触点km2-1连接于报警件11,以控制报警件11的通断。
50.因电源电路3对机器人进行充电时,必定会出现发热现象,当发热程度到达一定程度时,必定会充电效率有所影响且具有安全隐患,故设置一个温度传感器对桩体1内的温度进行测量并输出温度信号,当温度信号高于预设值时,说明温度较高,这时第一比较器u1输出高电平信号,第二三极管q2接收到高电平信号而导通,第二继电器km2随之导通,第二继电器km2的常开触点kn1-1闭合,报警件11开始工作以提示操作人员桩体1温度较高需要进行维护。
51.报警件11在本实施例中为蜂鸣器,还可以根据具体应用环境更换适当的报警件11。
52.如图2所示,桩体1上设置有锁定机构12,锁定机构12用于使机器人在桩体1上进行充电时保持锁定状态,减少机器人进行充电时会发生移动而从充电桩上脱出的可能性。
53.锁定机构12包括磁吸件121,磁吸件121固定连接在桩体1上,磁吸件121与机器人相对应设置。因机器人常常都使用了金属制外壳,故设置磁吸件121可以对机器人的进行吸引,使得机器人吸附在桩体1上。
54.实施原理为:
55.一般在一个充电区域内设置有多个充电桩,当机器人需要充电时,机器人通过wifi信号进行广播,这时多个充电桩接收到机器人发出的wifi信号,每个充电桩的主控模块5监测自身的电源电路3是否在进行充电,当电源电路3进行充电时,主控信号输出高电平的充电状态信号,无线模块6输出高电平的无线信号,机器人接收到高电平的无线信号得知该充电桩有机器人在充电;当其中一个充电桩上没有机器人进行充电时,其桩体1内的主控模块5发出低电平的充电状态信号,无线模块6转送出低电平的无线信号,机器人接收到低电平的无线信号后,根据无线信号内的唯一编码找到相对应的充电桩,并前往这个充电桩进行充电,以此使机器人自动前往空闲的充电桩进行充电,无需操作人员人工去为机器人找到合适的充电桩,快捷且方便。
56.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1