智能机器人的电机驱动模块的制作方法
1.本实用新型涉及机器人配套设备技术领域,特别是一种智能机器人的电机驱动模块。
背景技术:
2.随着工业技术的发展,智能机器人越来越多的应用在了各个生产领域。为了保证智能机器人的正常工作,智能机器人均配套有基于plc的控制系统,控制系统在相关探头控制作用下、控制智能机器人按照编程完成各种工作。
3.虽然现有的智能机器人技术已经较为成熟,但是其控制系统(也就是驱动模块)只能控制智能机器人的工作方式,无法对机器人内部的电机工作时产生的负荷及温度等进行实时监测,这样当智能机器人的电机在负荷过大或温升过高时,由于不能及时断开电机的电源,也不能及时通知不在现场的相关人员进行维修,会对正常工作带来不利影响,且还会因为故障时不能及时断开电机的电源,存在故障扩大化的隐患。综上所述,提供一种能实时监测电机温度及负荷,在出现异常时能及时断开电源,且能提示相关技术人员进行及时维护的电机驱动模块显得尤为必要。
技术实现要素:
4.为了克服现有智能机器人应用的电机驱动模块,因结构所限无法实时监测电机的负荷及温度,存在如背景技术所述弊端,本实用新型提供了基于电机驱动模块本体,应用中在相关机构及电路共同作用下,能实时监测电机的负荷和壳体温度,在电机负荷过大造成输入电压降低(比如短路),以及壳体温度过大时能及时断开电机驱动模块本体至电机的电源,且不但能通过现场报警提示现场工作人员,还能通过无线信号提示不在现场的值班室内人员进行维修,由此尽可能减少了对生产进度带来的不利影响,并防止了故障扩大化的智能机器人的电机驱动模块。
5.本实用新型解决其技术问题所采用的技术方案是:
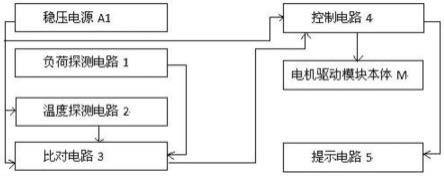
6.智能机器人的电机驱动模块,包括电机驱动模块本体、稳压电源,其特征在于还具有负荷探测电路、温度探测电路、比对电路、控制电路和提示电路;所述温度探测电路配套有热敏电阻,热敏电阻安装在智能机器人其中一个电机外壳外部;所述负荷探测电路、温度探测电路、比对电路、控制电路安装在元件箱内;所述稳压电源的电源输出端和负荷探测电路、温度探测电路、控制电路、比对电路的电源输入端电性连接;所述负荷探测电路及温度探测电路的信号输出端和比对探测电路两路信号输入端分别电性连接,比对电路的信号输出端和控制电路的信号输入端电性连接,控制电路的信号输出端和电机驱动模块本体的电源输入端电性连接。
7.进一步地,所述负荷探测电路包括电性连接的整流桥堆、电容、可调电阻和电阻、二极管,整流桥堆的正极电源输出端和电容正极、可调电阻一端连接,可调电阻另一端和电阻一端、二极管正极连接,整流桥堆的负极电源输出端和电容负极、电阻另一端连接。
8.进一步地,所述温度探测电路包括电性连接的电阻、二极管,并和热敏电阻电性连接,热敏电阻一端和电阻一端、二极管正极连接。
9.进一步地,所述比对电路包括电性连接的运放集成电路、可调电阻、电阻、二极管,运放集成电路的正极电源输入端和电阻一端连接,电阻另一端和可调电阻一端、运放集成电路的同相输入端、第一只二极管正极、第二只二极管负极连接,运放集成电路的反相输入端和第一只二极管负极、第二只二极管正极连接,运放集成电路的负极电源输入端和可调电阻另一端连接。
10.进一步地,所述控制电路包括电性连接的电阻、可控硅和继电器、电磁接触器和无线发射电路模块、蜂鸣器,继电器正极电源输入端和可控硅阴极连接,可控硅阳极和继电器控制电源输入端连接,继电器的常开触点端和接触器及无线发射电路模块、蜂鸣器的正极电源输入端连接,可控硅控制极和电阻一端连接,继电器负极电源输入端和接触器的负极电源输入端、无线发射电路模块的负极电源输入端、蜂鸣器负极电源输入端连接,无线发射电路模块的其中一只发射按键下两个触点连接在一起。
11.进一步地,所示提示电路包括电性连接的稳压电源a、无线接收电路模块、电阻、可控硅和蜂鸣器,稳压电源a的正极电源输出端和可控硅阳极、无线接收电路模块正极电源输入端连接,无线接收电路模块a的输出端和电阻一端连接,电阻另一端和可控硅控制极连接,可控硅阴极和蜂鸣器正极电源输入端连接,无线接收电路模块的负极电源输入端和蜂鸣器负极电源输入端连接。
12.本实用新型有益效果是:本新型基于电机驱动模块本体,应用中,温度探测电路能实时探测电机的温度数据,负荷探测电路能实时探测电机的负荷,当电机因各种原因造成壳体温度升高时,以及造成输入电压降低时,比对电路会输出控制信号进入控制电路,进而控制电路控制电机驱动模块本体和电机(实际是智能机器人上的所有电机)之间的电源断开,对电机起到保护作用,且不但能通过现场报警提示现场工作人员,还能通过无线信号经提示电路提示不在现场的值班室内人员进行维修,由此尽可能减少了对生产进度带来的不利影响,并防止了故障扩大化。基于上述,所以本实用新型具有好的应用前景。
附图说明
13.以下结合附图和实施例将本实用新型做进一步说明。
14.图1是本实用新型整体结构示意框图。
15.图2、3是本实用新型电路图。
具体实施方式
16.图1、2、3中所示,智能机器人的电机驱动模块,包括电机驱动模块本体m、稳压电源a1,还具有负荷探测电路1、温度探测电路2、比对电路3、控制电路4和提示电路5;所述温度探测电路配套有一只热敏电阻rt,热敏电阻rt经螺杆螺母及固定夹安装在智能机器人其中一个负荷最大的电机外壳外部(比如驱动机械臂运动的电机)、且热敏电阻rt的感温面紧贴电机外壳外;所述负荷探测电路1、温度探测电路2、比对电路3、控制电路4安装在智能机器人的元件箱内,提示电路5安装在工作区域值班室内。
17.图1、2、3所示,稳压电源a1是型号220v/12v/100w的交流220转直流12v开关电源模
块成品。负荷探测电路包括经电路板布线连接的整流桥堆a2、电容c1、可调电阻rp1和电阻r1、二极管vd2,整流桥堆a2的正极电源输出端3脚和电容c1正极、可调电阻rp1一端连接,可调电阻rp1另一端和电阻r1一端、二极管vd2正极连接,整流桥堆a2的负极电源输出端4脚和电容c1负极、电阻r1另一端连接。温度探测电路包括经电路板布线连接的电阻r、二极管vd1,并和热敏电阻rt经导线连接,热敏电阻rt一端和电阻r一端、二极管vd1正极连接。比对电路包括经电路板布线连接的运放集成电路a3、可调电阻rp2、电阻r2、二极管vd3及vd4,运放集成电路a3的正极电源输入端7脚和电阻r2一端连接,电阻r2另一端和可调电阻rp2一端、运放集成电路a3的同相输入端3脚、第一只二极管vd3正极、第二只二极管vd4负极连接,运放集成电路a3的反相输入端2脚和第一只二极管vd3负极、第二只二极管vd4正极连接,运放集成电路a3的负极电源输入端4脚和可调电阻rp2另一端连接。控制电路包括经电路板布线连接的电阻r3、可控硅vs1和继电器k1、直流电磁接触器dc和型号sf1500的无线发射电路模块成品a4、蜂鸣器b,继电器k1正极电源输入端和可控硅vs1阴极连接,可控硅vs1阳极和继电器k1控制电源输入端连接,继电器k1的常开触点端和接触器dc及无线发射电路模块a4的正极电源输入端2脚、蜂鸣器b正极电源输入端连接,可控硅vs1控制极和电阻r3一端连接,继电器k1负极电源输入端和接触器dc的负极电源输入端、无线发射电路模块a4的负极电源输入端2脚、蜂鸣器b负极电源输入端连接,无线发射电路模块a4的第一只发射按键s1下两个触点连接在一起。
18.图1、2、3所示,提示电路包括经电路板布线连接的稳压电源a a5(稳压电源aa5是型号220v/12v/100w的交流220v转直流12v开关电源模块成品),型号sf1500的无线接收电路模块成品a6、电阻r4、可控硅vs2和蜂鸣器b1;稳压电源aa5的电源输入端1及2脚和交流220v电源两极分别经导线连接,稳压电源aa5的正极电源输出端3脚和可控硅vs2阳极、无线接收电路模块a6正极电源输入端1脚连接,无线接收电路模块a6的输出端4脚(2、5、6、7脚悬空)和电阻r4一端连接,电阻r4另一端和可控硅vs2控制极连接,可控硅vs2阴极和蜂鸣器b1正极电源输入端连接,无线接收电路模块a6的负极电源输入端3脚和蜂鸣器b1负极电源输入端连接。稳压电源a1的电源输入端1及2脚、控制电路的接触器dc两个控制电源输入端、负荷探测电路的信号输入端整流桥堆a2的1及2脚和交流220v电源两极分别经导线连接,稳压电源a1的电源输出端3及4脚和负荷探测电路的电源输入端电容c1的负极(稳压电源a1的3脚和电容c1负极连接)、温度探测电路的电源输入端热敏电阻rt另一端及电阻r另一端、控制电路的电源输入端可控硅vs1阳极及继电器k1负极电源输入端、比对电路的电源输入端运放集成电路a3的7及4脚分别经导线连接。负荷探测电路信号输出端二极管vd2负极及温度探测电路的信号输出端二极管vd1负极和比对探测电路信号输入端运放集成电路a3的反向输入端2脚分别经导线连接,比对电路的信号输出端运放集成电路a3的6脚和控制电路的信号输入端电阻r3另一端经导线连接,控制电路的信号输出端接触器dc的两个常闭触点端和电机驱动模块m的电源输入两端分别经导线连接。
19.图1、2、3所示,本新型基于电机驱动模块本体m,平时电机驱动模块m输出的电源进入智能机器人的多个电源输入端,控制系统(电机驱动模块本体)在相关探头控制作用下、控制智能机器人的电机工作方式,进而智能机器人按照编程完成各种工作。220v交流电源进入稳压电源a1的1及2脚后,稳压电源a1的3及4脚会输出稳定的直流12v电源进入负荷探测电路、温度探测电路、控制电路、比对电路的电源输入端,上述电路得电工作。220v交流电
源进入稳压电源aa5的1及2脚后,稳压电源aa5的3及4脚会输出稳定的直流12v电源进入无线接收电路模块a6的电源输入端,无线接收电路模块a6处于得电工作状态。温度探测电路得电工作后,电机产生的热量会作用于热敏电阻rt,温度越高热敏电阻rt的电阻值越大、反之越低,当电机工作正常其壳体温度不高时(比如低于70℃),热敏电阻rt的电阻值相对低、电阻r(技术人员生产时改变r的电阻值,可改变电阻r和热敏电阻rt之间的分压系数,电阻r电阻值相对高时分压大、反之分压小)和热敏电阻rt之间的分压相对大,这样,电阻r处的电压经二极管vd1单向导通后进入运放集成电路a3的反相输入端2脚电压高于同向输入端3脚电压(该处电压由电阻r2及可调电阻rp2分压而得,设定为6v),运放集成电路的6脚输出低电平,那么可控硅vs1不会被触发导通,蜂鸣器b等均不得电工作。当电机工作不正常(例如负荷过大、电机短路等造成工作不正常)其壳体温度高时(比如高于70℃),热敏电阻rt的电阻值相对大、电阻r和热敏电阻rt之间的分压相对小,这样,电阻r处的电压经二极管vd1单向导通后进入运放集成电路a3的反相输入端2脚电压低于同相输入端3脚电压,运放集成电路的6脚输出高电平,那么可控硅vs1会被触发导通,蜂鸣器b等均得电工作。负荷探测电路中,当电机工作正常其输入端电压较高时(比如高于210v),交流电源经整流桥堆a2整流成直流电源、电容c1滤波后,通过可调电阻rp1和电阻r1分压后进入运放集成电路a3的反相输入端2脚电压高于同向输入端3脚电压,运放集成电路的6脚输出低电平,那么可控硅vs1不会被触发导通,蜂鸣器b等均不得电工作。当电机工作不正常其输入端电压较低时(比如低于210v),交流电源经整流桥堆a2整流成直流电源、电容c1滤波后,通过可调电阻rp1和电阻r1分压后进入运放集成电路a3的反相输入端2脚电压低于同向输入端3脚电压(二极管vd2单向导通作用),运放集成电路的6脚输出高电平,那么可控硅vs1会被触发导通,蜂鸣器b等均得电工作(技术人员生产时,通过调节可调电阻rp2的不同电阻值能改变监测阈值电压,当可调电阻rp2的电阻值调节得相对小、分压小时,那么电机的供电电压相对较高时,运放集成电路a3的6脚才会输出高电平,当可调电阻rp2的电阻值调节得相对大、分压大时,那么电机的供电电压相对较低时,运放集成电路a3的6脚就会输出高电平)。
20.图1、2、3所示,当电机因工作电压过低或者温度过高,运放集成电路a3的6脚输出高电平后,高电平会经电阻r3降压限流触发可控硅vs1导通,进而继电器k1得电吸合其控制电源输入端和常开触点端闭合,继之,接触器dc及蜂鸣器b、无线发射电路模块a4均得电工作。接触器dc得电后其控制电源输入端和常闭触点端开路,那么,电机驱动模块m失电,同时,智能机器人的所有电机均会失电不再工作,对电机起到保护作用,蜂鸣器b得电后发出响亮的提示声,提示现场工作人员电机出现故障及时进行维护;无线发射电路模块a4得电后,由于无线发射电路模块a4的发射按键s1键下两个触点预先连接在一起,所以无线发射电路模块a4此刻会发送出第一路无线闭合信号。
21.图1、2、3所示,无线发射电路模块发射出第一路无线闭合后,1500米范围内,位于值班室内的无线接收电路模块a6接收到第一路无线信号后其4脚会输出高电平经电阻r4降压限流触发可控硅vs2导通,于是可控硅vs2导通、蜂鸣器b1发出响亮的提示声音、提示值班室内人员现场智能机器人的电机出现问题及时到现场进行维护(关闭总电源后,蜂鸣器b1及b等均失电不工作)。通过上述所有电路及机构共同作用下,本新型基于电机驱动模块本体,应用中,温度探测电路能实时探测电机的温度数据,负荷探测电路能实时探测电机的负荷,当电机因各种原因造成壳体温度升高时,以及造成输入电压降低时,比对电路会输出控
制信号进入控制电路,进而控制电路控制电机驱动模块本体和电机之间的电源断开,对电机起到保护作用,且不但能通过现场报警提示现场工作人员,还能通过无线信号经提示电路提示不在现场的值班室内人员进行维修,由此尽可能减少了对生产进度带来的影响,并防止了故障扩大化。图2中,电阻r、r1、r2、r3、r4阻值分别是320k、100k、340k、4.7k、1k;可控硅vs1、vs2型号是mcr100-1;继电器k1型号是dc12v;蜂鸣器b、b1是型号sf12v的有源连续声讯响报警器成品;二极管vd1、vd2型号是1n4001;热敏电阻rt是正温度系数热敏电阻;二极管vd3、vd4型号是2cp13主要起到钳位作用(二极管钳位保护是由两个二极管反向串联组成,一次只能有一个二极管导通,而另一个处于截止状态,那么它的正反向压降就会被钳制在二极管正向导通压降0.5-0.7以下,从而起到保护电路的目的);可调电阻rp1、rp2型号是470k(分别调节到95k、10k)运放集成电路a3型号是ua741;整流桥堆a2型号是mb6s sop-4;电容c1是型号470μf/25v的电解电容;电磁接触器dc是型号gmd-22的直流电磁接触器;热敏电阻rt是型号ptc c840 6r的正温度系数热敏电阻。
22.以上显示和描述了本实用新型的基本原理和主要特征及本实用新型的优点,对于本领域技术人员而言,显然本实用新型限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
23.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1