一种高压开关柜操作机器人末端执行装置的制作方法
1.本实用新型涉及机器人末端执行器技术领域,特别涉及一种高压开关柜操作机器人末端执行装置。
背景技术:
2.10kv高压开关柜是10kv高压配电室的主要设备之一,日常运维主要包括开关柜工作状态巡检、开关柜手车摇进摇出操作以及开关柜接地刀闸倒闸操作。
3.目前通用的操作方式均为人工手动操作,由于开关柜手车摇进、摇出操作和接地刀闸倒闸操作流程复杂,导致人工操作时稍有失误就会引发严重事故,轻则财产损失,重则人员伤亡。
4.目前有个别公司正在针对这一工作研发自己的机器人产品,但目前的机器人只能实现手车摇进、摇出操作,接地刀闸倒闸操作由于其需要的扭矩非常大(100nm以上),目前还没有发现成功案例。
5.因此,如何提供一种高压开关柜操作机器人末端执行装置在完成手车摇进、摇出操作后,也可以完成接地刀闸倒闸操作是本领域技术人员亟需解决的问题。
技术实现要素:
6.本实用新型提供一种高压开关柜操作机器人末端执行装置,解决现有高压开关柜操作机器人末端执行器不能完成接地刀闸操作的技术问题。
7.本实用新型解决上述技术问题的技术方案如下,一种高压开关柜操作机器人末端执行装置,用于开闭所述高压开关柜,所述高压开关柜的柜门设有手车操作孔和地刀操作孔,所述地刀操作孔处安装有五防闭锁片,包括:安装座、定位相机、转台组件、伺服电机组件、手车扳手组件、地刀操作组件及五防闭锁片开启装置,
8.所述安装座安装在所述机器人的机械臂上;所述定位相机安装在所述安装座对应其前进方向的前端面;
9.所述转台组件包括转台变速箱、转动电机及转盘,所述转台变速箱的底端固定在所述安装座的顶面;所述转动电机安装在所述转台变速箱上;所述转盘水平转动连接在所述转台变速箱的顶端且与所述转动电机的输出轴传动连接;
10.所述伺服电机组件包括转动座、手车伺服电机及地刀伺服电机,所述转动座固定在所述转盘上;所述手车伺服电机和所述地刀伺服电机对称固定在所述转动座上;
11.所述手车扳手组件和所述地刀操作组件分别传动连接在所述手车伺服电机的输出轴和所述地刀伺服电机输出轴上;所述五防闭锁片开启装置安装在所述地刀操作组件上。
12.本实用新型的有益效果是:通过在安装座上安装转台组件,可以转动手车伺服电机和地刀伺服电机工作位置,由于手车扳手组件和地刀操作组件分别对称安装手车伺服电机和地刀伺服电机上,可以同步转动手车扳手组件和地刀操作组件的工作位置,以便于在
同一个末端执行器上完成高压开关柜的手车摇进摇出和接地刀闸倒闸操作,同时在地刀操作组件上安装有五防闭锁片开启装置,可以在地刀操作组件操作前开启高压开关柜的五防闭锁片,便于完成后续的接地刀闸倒闸操作。
13.在上述技术方案的基础上,本实用新型还可以做如下改进。
14.进一步,所述手车扳手组件包括手车套筒扳手,所述手车套筒扳手传动连接在所述手车伺服电机的输出轴上。
15.进一步,所述手车扳手组件还包括筒形的手车联轴器和手车弹簧,所述手车联轴器套设在所述手车伺服电机输出轴的外周侧且其一端固定在所述手车伺服电机上,所述手车联轴器另一端的内侧壁沿其径向向内延伸有环形挡板;所述手车弹簧对应所述手车联轴器内侧套设在所述手车伺服电机的输出轴上;所述手车伺服电机的输出轴的横截面为多边形,所述手车套筒扳手的一端穿设在所述手车联轴器远离所述手车伺服电机的一端内部且其内部开设有多边形孔,所述手车套筒扳手的多边形孔与所述手车伺服电机的输出轴滑动并传动连接且其一端外壁径向向外延伸有限位挡板,所述限位挡板可与所述环形挡板抵接,以限制所述手车套筒扳手脱离所述手车联轴器。
16.采用上述进一步的有益效果是:通过在手车伺服电机的输出轴上套设手车弹簧,当手车套筒扳手随安装座行进至高压开关柜的手车操作孔的规定位置后,手车套筒扳手将不会随安装座继续前进,而是挤压手车弹簧,避免手车套筒扳手破坏高压开关柜。
17.进一步,所述地刀操作组件包括地刀扳手扭力放大器和地刀套筒扳手,所述地刀扳手扭力放大器传动连接在所述地刀伺服电机的输出轴上;所述地刀套筒扳手传动连接在所述地刀扳手扭力放大器远离所述地刀伺服电机的一端;所述五防闭锁片开启装置对应所述地刀套筒扳手的外周侧滑动连接在所述地刀扳手扭力放大器远离所述地刀伺服电机的一端。
18.采用上述进一步的有益效果是:通过增加地刀扭力放大器可以提高地刀套筒扳手的旋转扭力,进而完成高压开关柜的接地刀闸倒闸操作。
19.进一步,所述地刀扳手扭力放大器包括旋转座、轴承、行星减速器及方轴,
20.所述旋转座开设有贯穿孔且套设在所述地刀伺服电机的输出轴上;所述轴承的外圈穿固在所述贯穿孔内且其内圈套固在所述地刀伺服电机的输出轴上;所述行星减速器对应所述轴承远离所述地刀伺服电机的一侧穿固在所述贯穿孔内且其一端与所述地刀伺服电机的输出轴传动连接;所述方轴传动连接在所述行星减速器的另一端;所述地刀套筒扳手传动连接在所述方轴上。
21.进一步,所述地刀扳手扭力放大器还包括地刀弹簧,所述地刀弹簧套设在所述方轴的外周侧且其一端与所述方轴靠近所述行星减速器的一端固定连接;所述地刀套筒扳手的一端开设有方形孔且所述方形孔滑动且传动连接在所述方轴上,所述地刀套筒扳手的一端外壁与所述地刀弹簧的另一端抵接。
22.采用上述进一步的有益效果是:通过在方轴的外周侧套设地刀弹簧,当地刀套筒扳手随安装座行进至高压开关柜的地刀操作孔的规定位置后,将不会随安装座继续前进,而是挤压地刀弹簧,避免地刀套筒扳手破坏高压开关柜。
23.进一步,所述地刀扳手扭力放大器还包括摩擦盘和摩擦器,所述摩擦盘的中间开设有固定孔且套固在所述地刀伺服电机的输出轴上;所述摩擦器固定在所述旋转座的一侧
面且与所述摩擦盘摩擦连接。
24.采用上述进一步的有益效果是:通过将在旋转座上安装摩擦器,并将该摩擦器与摩擦盘摩擦连接,可以带动旋转座旋转。
25.进一步,所述地刀扳手扭力放大器还包括支臂,所述支臂的一端固定在所述旋转座上,另一端可与所述高压开关柜的柜门抵接。
26.采用上述进一步的有益效果是:通过支臂的另一端与高压开关柜的柜门抵接,可以避免地刀套筒扳手的反作用力作用在机械人的机械臂上,进而保护机器人的机械臂。
27.进一步,所述地刀扳手扭力放大器还包括滑轨,所述滑轨固定在所述旋转座的底面;所述五防闭锁片开启装置包括摆动伺服电机、支架、滑块、摇臂、连杆及压架,所述摆动伺服电机位于所述地刀套筒扳手的一侧;所述支架对应所述地刀套筒扳手的上方固定在所述摆动伺服电机上;所述滑块固定在所述支架上且滑动连接在所述滑轨上;所述摇臂平行位于所述地刀套筒扳手的一侧且其一端垂直传动连接在所述摆动伺服电机的输出轴上,所述摇臂以其与所述摆动伺服电机输出轴固定的连接点为原点并进行上下摆动运动;所述连杆的一端转动连接在所述摇臂的另一端;所述压架对应所述支架和所述地刀套筒扳手的下方转动在所述连杆的另一端,且可在所述连杆的带动下以所述连杆铰接的铰接点为原点进行上下摆动。
28.采用上述进一步的有益效果是:摆动伺服电机转动可以带动摇臂以其与摆动伺服电机输出轴固定的连接点为原点并进行上下摆动运动,进而带动连杆、压架进行上下摆动运动,上下摆动的压架可以将五防闭锁片拨动,进而便于地刀套筒扳手完成高压开关柜的接地刀闸倒闸操作。
29.进一步,还包括弹簧顶板、第一插杆、第二插杆和复位弹簧,所述弹簧顶板对应所述地刀伺服电机和所述旋转座之间固定在所述旋转座上;所述第一插杆的一端对应所述旋转座的下方垂直在所述弹簧顶板上;所述第二插杆与所述第一插杆平行相对布置且其一端固定在所述支架上;所述复位弹簧套设在所述第一插杆和所述第二插杆上。
30.采用上述进一步的有益效果是:通过将第一插杆和第二插杆分别固定在弹簧顶板和支架上,由于弹簧顶板位于地刀伺服电机和转转座之间,第一插杆和第二插杆之间位于地刀扳手扭力放大器和五防闭锁片开启装置之间,当五防闭锁片开启装置随安装座行进至固定位置后,将不会随安装座继续前进,而是复位弹簧,避免五防闭锁片开启装置破坏高压开关柜
31.进一步,所述地刀扭力放大器还包括陀螺仪,所述陀螺仪固定在所述旋转座上。
32.采用上述进一步的有益效果是:可以测定地刀扭力放大器是否处于水平或者竖直状态。
33.进一步,所述连杆为y形结构,所述压架包括两个固定板和压杆,两个所述固定板对应所述支架和所述地刀套筒扳手的下方且平行布置,两个所述固定板的底端分别与所述连杆具有两个分支的一端固定连接;所述压杆垂直固定在两个所述固定板之间。
附图说明
34.图1为高压开关柜;
35.图2为图1a处结构放大示意图;
36.图3为本实用新型一种高压开关柜操作机器人末端执行装置组装结构示意图;
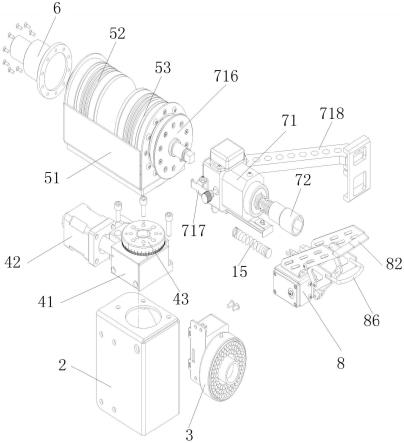
37.图4为本实用新型一种高压开关柜操作机器人末端执行装置拆分结构示意图;
38.图5为本实用新型一种高压开关柜操作机器人末端执行装置内部组装结构;
39.图6为本实用新型一种高压开关柜操作机器人末端执行装置中地刀操作组件爆炸结构示意图;
40.图7为本实用新型一种高压开关柜操作机器人末端执行装置中五防闭锁片开启装置爆炸结构示意图。
41.附图中,各标号所代表的部件列表如下:
42.1、高压开关柜,11、手车操作孔,12、地刀操作孔,13、五防闭锁片,
43.2、安装座,3、定位相机,
44.4、转台组件,41、转台变速箱,42、转动电机,43、转盘,
45.5、伺服电机组件,51、转动座,52、手车伺服电机,53、地刀伺服电机,
46.6、手车扳手组件,61、手车套筒扳手,611、限位挡板,62、手车联轴器,621、环形挡板,63、手车弹簧,
47.7、地刀操作组件,71、地刀扳手扭力放大器,711、旋转座,7111、贯穿孔,712、轴承,713、行星减速器,714、方轴,715、地刀弹簧,716、摩擦盘,717、摩擦器,718、支臂,719、滑轨,710、陀螺仪,72、地刀套筒扳手,
48.8、五防闭锁片开启装置,81、摆动伺服电机,82、支架,83、滑块, 84、摇臂,85、连杆,86、压架,
49.9、弹簧顶板,10、第一插杆,14、第二插杆,15、复位弹簧。
具体实施方式
50.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
51.如图1所示,一种高压开关柜操作机器人末端执行装置,用于开闭高压开关柜1,高压开关柜1的柜门设有手车操作孔11和地刀操作孔12,地刀操作孔12处安装有五防闭锁片13,其特征在于,包括:安装座2、定位相机 3、转台组件4、伺服电机组件5、手车扳手组件6、地刀操作组件7及五防闭锁片开启装置8,
52.安装座2安装在机器人的机械臂上;定位相机3安装在安装座2对应其前进方向的前端面;
53.转台组件4包括转台变速箱41、转动电机42及转盘43,转台变速箱41 的底端固定在安装座2的顶面;转动电机42安装在转台变速箱41上;转盘 43水平转动连接在转台变速箱41的顶端且与转动电机42的输出轴传动连接;
54.伺服电机组件5包括转动座51、手车伺服电机52及地刀伺服电机53,转动座51固定在转盘43上;手车伺服电机52和地刀伺服电机53对称固定在转动座51上;
55.手车扳手组件6和地刀操作组件7分别传动连接在手车伺服电机52的输出轴和地刀伺服电机53输出轴上;五防闭锁片开启装置8安装在地刀操作组件7上。
56.在一些具体实施例中,手车扳手组件6可以包括手车套筒扳手61,手车套筒扳手61传动连接在手车伺服电机52的输出轴上。
57.在一些具体实施例中,手车扳手组件6还可以包括筒形的手车联轴器62 和手车弹簧63,手车联轴器62套设在手车伺服电机52输出轴的外周侧且其一端固定在手车伺服电机52上,手车联轴器62另一端的内侧壁沿其径向向内延伸有环形挡板621;手车弹簧63对应手车联轴器62内侧套设在手车伺服电机52的输出轴上;手车伺服电机52的输出轴的横截面为多边形,手车套筒扳手61的一端穿设在手车联轴器62远离手车伺服电机52的一端内部且其内部开设有多边形孔,手车套筒扳手61的多边形孔与手车伺服电机52 的输出轴滑动并传动连接且其一端外壁径向向外延伸有限位挡板611,限位挡板611可与环形挡板621抵接,以限制手车套筒扳手61脱离手车联轴器 62。
58.在一些具体实施例中,地刀操作组件7可以包括地刀扳手扭力放大器71 和地刀套筒扳手72,地刀扳手扭力放大器71传动连接在地刀伺服电机53 的输出轴上;地刀套筒扳手72传动连接在地刀扳手扭力放大器71远离地刀伺服电机53的一端;五防闭锁片开启装置8对应地刀套筒扳手72的外周侧滑动连接在地刀扳手扭力放大器71远离地刀伺服电机53的一端。
59.在一些具体实施例中,地刀扳手扭力放大器71可以包括旋转座711、轴承712、行星减速器713及方轴714,旋转座711开设有贯穿孔7111且套设在地刀伺服电机53的输出轴上;轴承712的外圈穿固在贯穿孔7111内且其内圈套固在地刀伺服电机53的输出轴上;行星减速器713对应轴承712远离地刀伺服电机53的一侧穿固在贯穿孔7111内且其一端与地刀伺服电机53 的输出轴传动连接;方轴714传动连接在行星减速器713的另一端;地刀套筒扳手72传动连接在方轴714上。
60.在一些具体实施例中,地刀扳手扭力放大器71还可以包括地刀弹簧 715,地刀弹簧715套设在方轴714的外周侧且其一端与方轴714靠近行星减速器713的一端固定连接;地刀套筒扳手72的一端开设有方形孔且方形孔滑动且传动连接在方轴714上,地刀套筒扳手72的一端外壁与地刀弹簧 715的另一端抵接。
61.在一些具体实施例中,地刀扳手扭力放大器71还可以包括摩擦盘716 和摩擦器717,摩擦盘716的中间开设有固定孔且套固在地刀伺服电机53 的输出轴上;摩擦器717固定在旋转座711的一侧面且可与摩擦盘716摩擦连接。
62.在一些具体实施例中,地刀扳手扭力放大器71还可以包括支臂718,支臂718的一端固定在旋转座711上,另一端可与高压开关柜1的柜门抵接。
63.在一些具体实施例中,地刀扳手扭力放大器71还可以包括滑轨719,滑轨719固定在旋转座711的底面;五防闭锁片开启装置8包括摆动伺服电机 81、支架82、滑块83、摇臂84、连杆85及压架86,摆动伺服电机81位于地刀套筒扳手72的一侧;支架82对应地刀套筒扳手72的上方固定在摆动伺服电机81上;滑块83固定在支架82上且滑动连接在滑轨719上;摇臂 84平行位于地刀套筒扳手72的一侧且其一端垂直传动连接在摆动伺服电机 81的输出轴上,摇臂84以其与摆动伺服电机81输出轴固定的连接点为原点并进行上下摆动运动;连杆85的一端转动连接在摇臂84的另一端;压架86 对应支架82和地刀套筒扳手72的下方转动在连杆85的另一端,且可在连杆85的带动下以连杆85铰接的铰接点为原点进行上下摆动。
64.在一些具体实施例中,还可以包括弹簧顶板9、第一插杆10、第二插杆 14和复位弹簧15,弹簧顶板9对应地刀伺服电机53和旋转座711之间固定在旋转座711上;第一插杆10的
一端对应旋转座711的下方垂直在弹簧顶板9上;第二插杆14与第一插杆10平行相对布置且其一端固定在支架82 上;复位弹簧15套设在第一插杆10和第二插杆14上。
65.以上仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1