一种自动控制电路的制作方法
本技术涉及电气控制,特别涉及一种自动控制电路。
背景技术:
1、随着科技的飞速发展和人们生活水平的提高,飞机已经成为人们出行常用的工具。
2、压缩气体是飞机装配制造业必备的能源之一,压缩气体产生后需要储存到储气罐中,飞机装配制造需要的气体压力大约在0.7mpa左右,储气罐耐压值一般为1.05mpa,储气罐属于压力容器范畴,作为特种设备进行管理,储气罐安全阀需要定期进行功能安全定检,安全阀位于储气罐的轴心位置最顶端,安全阀口径直径为50mm,储气罐为圆柱桶状结构,直径约为1.8m,高度约为4m,加上储气罐基础平台和支撑架,总高度约5.2m,为此带来储气罐安全阀的拆装极其不方便,安全阀口径大,拆装操作人员无稳固的落脚平台,拆装作业即无法用力,也存在极大的安全隐患。
技术实现思路
1、基于此,本实用新型的目的是提供一种自动控制电路,以至少解决上述相关技术中的不足。
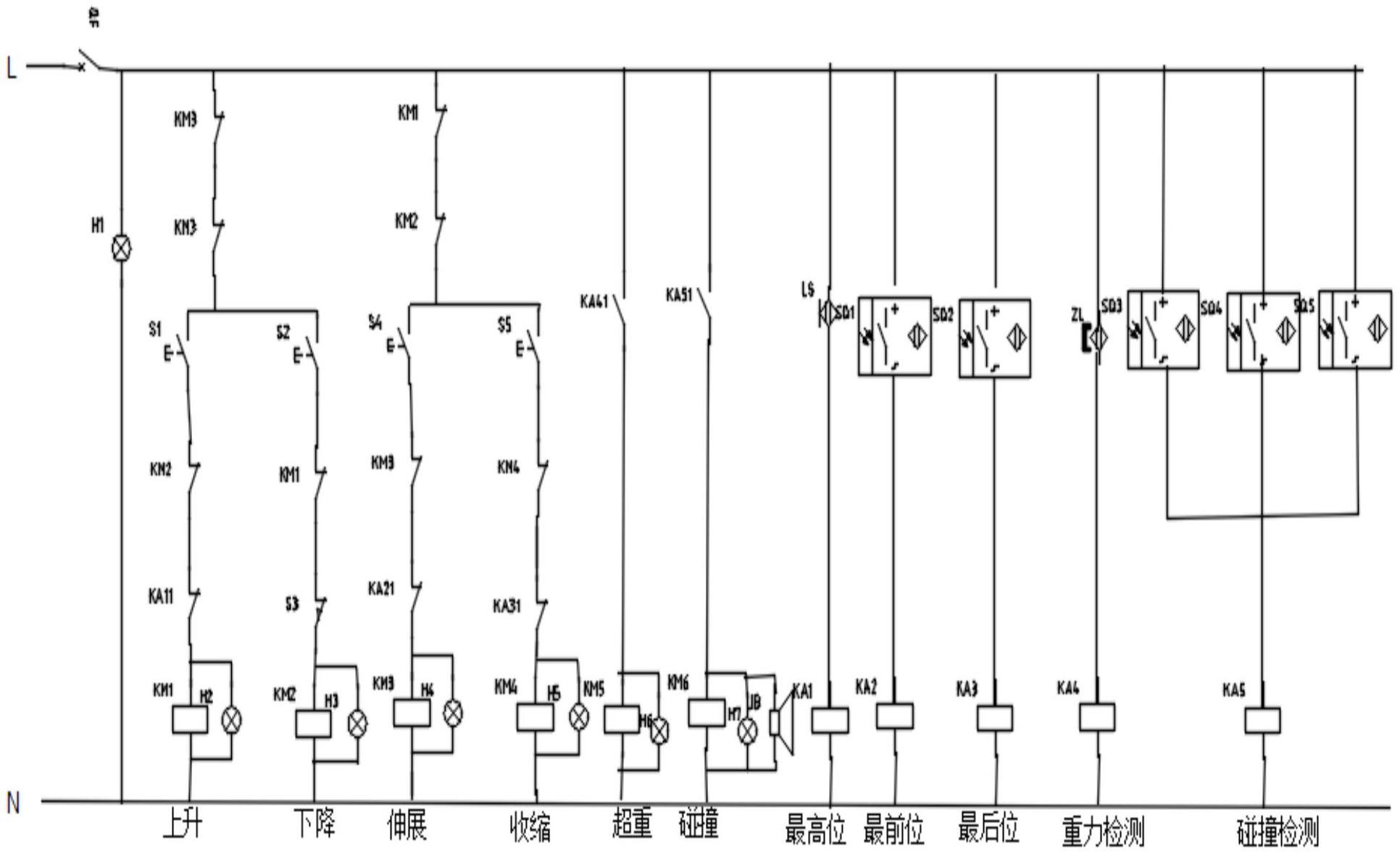
2、本实用新型提出一种自动控制电路,包括第一电机、第二电机、输出模块以及交流输入源端口,所述第一电机通过第一接触器和第二接触器与所述交流输入源端口相连接,所述第二电机通过第三接触器和第四接触器与所述交流输入源端口相连接,所述第一电机和所述第二电机均与所述输出模块电性连接,所述第一电机用于控制所述输出模块执行升降动作,所述第二电机用于控制所述输出模块执行伸缩动作,所述第一接触器和所述第二接触器以及所述第三接触器和所述第四接触器均采用互锁设计。
3、进一步的,所述自动控制电路还包括升降控制电路、伸缩控制电路,所述第一接触器和所述第二接触器的常闭触点与所述伸缩控制电路相互串联,以实现所述输出模块的伸缩控制,所述第三接触器和所述第四接触器的常闭触点与所述升降控制电路相互串联,以实现所述输出模块的升降控制。
4、进一步的,在所述输出模块的最高点设置位移传感器,在所述位移传感器与所述升降控制电路之间设有第一中间继电器,所述第一中间继电器的常闭触点与所述升降控制电路串联。
5、进一步的,在所述输出模块的最低点设置接触式常闭行程开关,在所述接触式常闭行程开关与所述伸缩控制电路之间设有第二中间继电器,所述第二中间继电器的常闭触点与所述伸缩控制电路串联,在所述第二中间继电器上串联设有第一接近开关,所述第一接近开关用于控制所述第二中间继电器。
6、进一步的,所述自动控制电路还包括第二接近开关以及第三中间继电器,所述第二接近开关用于控制所述第三中间继电器,所述第三中间继电器的常闭触点与所述伸缩控制电路串联。
7、进一步的,所述自动控制电路还包括重力检测电路,所述重力检测电路包括重力传感器、第四中间继电器以及第五接触器,所述重力传感器控制所述第四中间继电器,所述第四中间继电器的常开触点与所述第五接触器相连接,当所述输出模块超载时,通过所述第五接触器进行断路。
8、进一步的,所述自动控制电路还包括碰撞检测电路,所述碰撞检测电路包括设置在所述输出模块的两端且靠内测设置的多个光电开关、第五中间继电器以及第六接触器,所述多个光电开关之间相互并联,所述第五中间继电器的常开触点控制所述第六接触器,当所述输出模块发生碰撞时,所述第六接触器断开,以发出碰撞干涉信号。
9、进一步的,所述输出模块为升降平台。
10、与现有技术相比,本实用新型的有益效果是:通过设计自动控制电路,使得拆装相关的输出模块能够得到有效的控制,通过第一电机与第一接触器和第二接触器的适配,使得输出模块能够进行升降动作,同时通过第二电机与第三接触器和第四接触器的适配,使得输出模块能够进行伸缩动作,进而能够实现输出模块对物件的搬运及装载的效果,进而使得工作人员能够有效的进行控制,节省工作时间,提高工作效率。
技术特征:
1.一种自动控制电路,其特征在于,包括第一电机、第二电机、输出模块以及交流输入源端口,所述第一电机通过第一接触器和第二接触器与所述交流输入源端口相连接,所述第二电机通过第三接触器和第四接触器与所述交流输入源端口相连接,所述第一电机和所述第二电机均与所述输出模块电性连接,所述第一电机用于控制所述输出模块执行升降动作,所述第二电机用于控制所述输出模块执行伸缩动作,所述第一接触器和所述第二接触器以及所述第三接触器和所述第四接触器均采用互锁设计。
2.根据权利要求1所述的自动控制电路,其特征在于,所述自动控制电路还包括升降控制电路、伸缩控制电路,所述第一接触器和所述第二接触器的常闭触点与所述伸缩控制电路相互串联,以实现所述输出模块的伸缩控制,所述第三接触器和所述第四接触器的常闭触点与所述升降控制电路相互串联,以实现所述输出模块的升降控制。
3.根据权利要求2所述的自动控制电路,其特征在于,在所述输出模块的最高点设置位移传感器,在所述位移传感器与所述升降控制电路之间设有第一中间继电器,所述第一中间继电器的常闭触点与所述升降控制电路串联。
4.根据权利要求2所述的自动控制电路,其特征在于,在所述输出模块的最低点设置接触式常闭行程开关,在所述接触式常闭行程开关与所述伸缩控制电路之间设有第二中间继电器,所述第二中间继电器的常闭触点与所述伸缩控制电路串联,在所述第二中间继电器上串联设有第一接近开关,所述第一接近开关用于控制所述第二中间继电器。
5.根据权利要求2所述的自动控制电路,其特征在于,所述自动控制电路还包括第二接近开关以及第三中间继电器,所述第二接近开关用于控制所述第三中间继电器,所述第三中间继电器的常闭触点与所述伸缩控制电路串联。
6.根据权利要求1所述的自动控制电路,其特征在于,所述自动控制电路还包括重力检测电路,所述重力检测电路包括重力传感器、第四中间继电器以及第五接触器,所述重力传感器控制所述第四中间继电器,所述第四中间继电器的常开触点与所述第五接触器相连接,当所述输出模块超载时,通过所述第五接触器进行断路。
7.根据权利要求1所述的自动控制电路,其特征在于,所述自动控制电路还包括碰撞检测电路,所述碰撞检测电路包括设置在所述输出模块的两端且靠内测设置的多个光电开关、第五中间继电器以及第六接触器,所述多个光电开关之间相互并联,所述第五中间继电器的常开触点控制所述第六接触器,当所述输出模块发生碰撞时,所述第六接触器断开,以发出碰撞干涉信号。
8.根据权利要求1所述的自动控制电路,其特征在于,所述输出模块为升降平台。
技术总结
本技术提供一种自动控制电路,包括第一电机、第二电机、输出模块以及交流输入源端口,第一电机通过第一接触器和第二接触器与交流输入源端口相连接,第二电机通过第三接触器和第四接触器与交流输入源端口相连接,第一电机和第二电机均与输出模块电性连接,第一电机用于控制输出模块执行升降动作,第二电机用于控制输出模块执行伸缩动作,第一接触器和第二接触器以及第三接触器和第四接触器均采用互锁设计。本技术通过设计自动控制电路,使得拆装相关的输出模块能够得到有效的控制,进而能够实现输出模块对物件的搬运及装载的效果,进而使得工作人员能够有效的进行控制,节省工作时间,提高工作效率。
技术研发人员:李峰,刘青松,包婧,孔理,周广涛,李斌,刘雄武,何伟民,汪静,杨晨睿,邹林飞
受保护的技术使用者:江西洪都商用飞机股份有限公司
技术研发日:20221118
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!