巡检中智能巡检装置的供电拖缆的布设及跟随方法与流程
1.本发明涉及一种智能巡检装置,特别涉及一种智能巡检装置供电拖缆的布设及张紧机构,以及巡检中智能巡检装置的供电拖缆的布设及跟随方法。
背景技术:
2.随着物联网及大数据技术的快速发展,工业生产领域的智能管理体系日渐成熟;智能巡检装置(又称为智能巡检机器人)是人工智能技术与机械智能技术结合的产物,已被广泛应用于生产实践过程中;采用智能巡检装置进行现场巡检,正逐渐取代传统的生产现场的人工巡查工作,特别是在环境恶劣和危险性高的生产现场,智能巡检装置正发挥出越来越重要的作用;现有的智能巡检装置一般是通过自带蓄电池,为智能巡检装置提供电源,但在一些特殊生产环境下,比如:高瓦斯矿井、焦化行业、石油行业等有爆炸风险的作业区域,由于对智能巡检装置所用的电池的充、放电管理有着严格的条件限制,成为了智能巡检装置电源配置的一个难题。
3.在煤矿井下生产中,开采出的煤炭一般是通过皮带输送机运送到井上的,智能巡检装置一般用于对煤炭输送装置及周围环境进行定期巡检,采集相关信息,为井下安全生产保驾护航;智能巡检装置巡检时,一般是行走在固定巡检轨道上;由于井下配备有完善的电源设备,防爆电缆技术也很成熟,若通过供电拖缆为智能巡检装置供电,是一个不错的选择;但一般井下巡检路线较长,若按巡检路线的长度,为智能巡检装置配置拖缆,将会加大拖缆的设备投入费用,如何减少拖缆的长度,并科学合理地对其进行布设,成为现场需要解决的一个问题;另外,由于智能巡检装置在巡检轨道上是作往返运动的,在智能巡检装置行走过程中,如何实现拖缆在跟随智能巡检装置行走的过程中,保证拖缆不出现被强力拽断或出现重叠折弯现象,实现其自如安全的收起和释放,成为智能巡检装置在巡检行走过程中,需要解决的另一个难题。
4.由于智能巡检装置一般工作在较恶劣的环境之中,智能巡检装置的电源供给是该设备的重要组成部分,若采用拖缆形式给智能巡检装置供电,拖缆与智能巡检装置连接处的可靠连接,是智能巡检装置正常工作的前提;当智能巡检装置启动或停止时,都会对拖缆连接处形成冲击力,如何克服该冲击力,保证供电拖缆与智能巡检装置连接的可靠,是需要克服的一个难题。
技术实现要素:
5.本发明提供了一种巡检中智能巡检装置的供电拖缆的布设及跟随方法,解决了如何经济合理地布设智能巡检装置的供电拖缆,以及在智能巡检装置行走时如何实现供电拖缆的安全自如收放的技术问题。
6.本发明的总体构思:在智能巡检装置的行走轨道一侧,跟随轨道并列布置u形线槽,将智能巡检装置的供电拖缆设置在u形线槽中,在u形线槽内,活动设置长方体形的电缆拖拽行走小车,在电缆拖拽行走小车上,沿上下竖直方向设置有一个定滑轮;在智能巡检装
置行走轨道的中部,设置智能巡检装置供电电缆的接入点,取智能巡检装置行走轨道长度的一半(即智能巡检装置的巡检路线的1/2),作为智能巡检装置的供电拖缆的长度,将该供电拖缆的一端连接在智能巡检装置行走轨道中部设置的供电电缆的接入点上,在接入点处,将该供电拖缆导入u形线槽内,再将该供电拖缆的另一端,绕过电缆拖拽行走小车上设置的定滑轮后,沿u形线槽回牵后,连接到智能巡检装置的供电电缆连接点上;在智能巡检装置行走轨道的起点处,设置供电拖缆的张紧机构,在拖缆张紧机构上,设置电机控制的张紧线辊,在张紧线辊上,缠绕有牵引线绳,牵引线绳的端头连接在电缆拖拽行走小车的右端;绕过定滑轮的供电电缆是设置在电缆拖拽行走小车的左端外侧的,在电缆拖拽行走小车上形成了牵引线绳向右,而供电拖缆向左的反向对拉形式,使牵引线绳通过电缆拖拽行走小车,起到了对绕过定滑轮的供电电缆张紧的作用;当智能巡检装置向左行走时,张紧线辊通过放线,使电缆拖拽行走小车跟随智能巡检装置向左行走;当智能巡检装置向右行走时,张紧线辊通过收线,使电缆拖拽行走小车跟随智能巡检装置向右行走;实现了智能巡检装置在往复全程运动中,通过牵引线绳的牵引,始终使供电拖缆处于张紧状态,保证了智能巡检装置在巡检中供电电缆收放自如和可靠供电;针对智能巡检装置的启动和停止时对供电拖缆连接处的冲击,本发明在张紧机构上设置了牵引绳的u形缓冲区域,并在供电拖缆与智能巡检装置的连接处设置滑台缓冲机构,以缓冲克服智能巡检装置在启动或停止时对拖缆连接处的冲击,保证供电拖缆与智能巡检装置的可靠连接。
7.一种智能巡检装置供电拖缆的布设及张紧机构,包括巡检巷道、智能巡检装置和智能巡检装置的供电拖缆,在巡检巷道内的墙壁上,设置有悬臂支架,在悬臂支架上,设置有智能巡检装置的巡检轨道,在巡检轨道上设置有智能巡检装置;在巡检轨道的内侧,固定设置有u形线槽,u形线槽与巡检轨道是平行并列设置的;在u形线槽中,活动设置有供电拖缆张紧小车,在供电拖缆张紧小车上,设置有拖缆转向定滑轮;在巡检巷道的中点处,设置有供电拖缆接入柱,供电拖缆的长度为巡检轨道总长度的一半,供电拖缆被布设在u形线槽中,供电拖缆的固定端连接在供电拖缆接入柱上,供电拖缆的活动端绕过拖缆转向定滑轮后,连接在智能巡检装置上;在巡检轨道的起始端的右侧,固定设置有牵引绳的收放跟随机构,在牵引绳的收放跟随机构上设置有可收放的牵引绳,牵引绳的端头连接在供电拖缆张紧小车的右端;牵引绳的收放跟随机构,通过牵引绳对供电拖缆张紧小车的牵引,使绕过拖缆转向定滑轮的供电拖缆始终保持在张紧状态下。
8.智能巡检装置是在巡检轨道的起始端与巡检轨道的终点端之间进行往复巡检运行的。
9.在牵引绳的收放跟随机构的t字形牵引绳支架的顶端横梁上,沿从左向右的方向,分别设置有第一定滑轮、第二定滑轮、第三定滑轮和第四定滑轮,在t字形牵引绳支架的底座板上,分别设置有牵引绳的缠绕线辊、缠绕线辊驱动电机和排绳器;连接在供电拖缆张紧小车右端的牵引绳,沿从左向右的方向,依次通过第一定滑轮、第二定滑轮、第三定滑轮、第四定滑轮和排绳器后,缠绕在牵引绳的缠绕线辊上;在第二定滑轮与第三定滑轮之间的牵引绳上,悬吊有牵引绳u形缓冲区域动滑轮,在牵引绳u形缓冲区域动滑轮的轮轴上,吊接有配重支架,在配重支架上吊接有配重块;在第一定滑轮一侧的t字形牵引绳支架的顶端横梁上,设置有第一定滑轮旋转方向识别传感器,在t字形牵引绳支架的立柱上,设置有配重块升降行程识别传感器。
10.在智能巡检装置上,固定连接有之字形支架,在之字形支架的上端,连接有水平滑轨安装平台,在水平滑轨安装平台上,沿智能巡检装置的行走方向,固定设置有滑轨,在滑轨上活动设置有滑块,在滑块上,固定设置有拖缆固定连接悬臂块,供电拖缆的活动端固定连接在拖缆固定连接悬臂块上;智能巡检装置的电源接入线通过拖缆固定连接悬臂块与供电拖缆的活动端电连接在一起。
11.在水平滑轨安装平台上,设置有摆臂销轴安装立板,在摆臂销轴安装立板上,分别设置有左l形摆臂销轴和右l形摆臂销轴,在左l形摆臂销轴上铰接有左l形摆臂,左l形摆臂设置在滑块的左立面的外侧,在右l形摆臂销轴上铰接有右l形摆臂,右l形摆臂设置在滑块的右立面的外侧,在左l形摆臂的顶端与右l形摆臂的顶端之间,设置有拉簧,在水平滑轨安装平台的下底面上,设置有摆臂压力传感器,左l形摆臂的下横杆和右l形摆臂的下横杆,均设置在摆臂压力传感器的下方。
12.供电拖缆张紧小车的车体架为一长方体形架体,在车体架的底端分别设置有四个行走轮,在车体架的左端设置有左导向限位轮,在车体架的右端设置有右导向限位轮,在左导向限位轮与右导向限位轮之间,设置有拖缆转向定滑轮,拖缆转向定滑轮是沿上下方向竖直设置的,供电拖缆是从拖缆转向定滑轮的上端缠绕到拖缆转向定滑轮上,再从拖缆转向定滑轮的下端向左引出的;车体架通过四个行走轮活动设置在u形线槽内的底面上,左导向限位轮和右导向限位轮,均活动设置在u形线槽内的前后两侧面之间。
13.供电拖缆接入柱左侧的巡检轨道为u形巡检轨道,在u形巡检轨道的转弯处,沿转弯方向,间隔地成对地设置有竖直辊筒,供电拖缆是设置在成对的竖直辊筒之间的。
14.一种巡检中智能巡检装置的供电拖缆的布设及跟随方法,包括巡检巷道、智能巡检装置、智能巡检装置的供电拖缆和牵引绳的收放跟随机构,在巡检巷道内的墙壁上,设置有悬臂支架,在悬臂支架上,设置有智能巡检装置的巡检轨道,在巡检轨道上设置有智能巡检装置,在巡检轨道的内侧,固定设置有u形线槽,u形线槽与巡检轨道是平行并列设置的;其特征在于以下步骤:第一步、在巡检轨道的起始端处的u形线槽内,活动设置供电拖缆张紧小车,在供电拖缆张紧小车上,设置有拖缆转向定滑轮;将牵引绳的收放跟随机构固定设置在巡检轨道的起始端外侧,在牵引绳的收放跟随机构上,设置有可收放的牵引绳;在巡检巷道的中点处,设置供电拖缆接入柱,在供电拖缆接入柱上设置有供电电源接入点;第二步、将巡检轨道的总长度的一半,作为供电拖缆的总长度,制作供电拖缆;将智能巡检装置设置在巡检轨道的起始端处;第三步、先将供电拖缆的始端,固定连接在供电拖缆接入柱上的电源接入点上,再将供电拖缆布设在u形线槽中,使供电拖缆的终端,绕过供电拖缆张紧小车上设置的拖缆转向定滑轮后,再沿u形线槽返回后,连接在智能巡检装置的电源接入点上;第四步、将可收放的牵引绳的端部与供电拖缆张紧小车的右端固定连接在一起,并使连接在供电拖缆张紧小车上的可收放的牵引绳与绕过拖缆转向定滑轮的供电拖缆,呈一字形反方向布置状态;第五步、启动智能巡检装置,智能巡检装置从巡检巷道的起点处向着巡检巷道的中点处开始行走,智能巡检装置通过供电拖缆对拖缆转向定滑轮的作用,使供电拖缆张紧小车跟随智能巡检装置,在u形线槽中,也向巡检巷道的中点处方向移动;牵引绳的收放跟
随机构同步释放牵引绳,在此过程中,从供电拖缆接入柱上的电源接入点到拖缆转向定滑轮处的供电拖缆的长度逐渐减少,而从拖缆转向定滑轮到智能巡检装置的供电拖缆的长度逐渐增加,往复连接在供电拖缆接入柱上的电源接入点、拖缆转向定滑轮和智能巡检装置的电源接入点之间的供电拖缆始终是处于张紧状态的;第六步、当智能巡检装置行走过供电拖缆接入柱上的电源接入点处后,从供电拖缆接入柱上的电源接入点到拖缆转向定滑轮处的供电拖缆的长度,就会小于从拖缆转向定滑轮到智能巡检装置的供电拖缆的长度,牵引绳的收放跟随机构,继续释放牵引绳,往复连接在供电拖缆接入柱上的电源接入点、拖缆转向定滑轮和智能巡检装置的电源接入点之间的供电拖缆始终处于张紧状态;直至智能巡检装置巡检到巡检轨道的终点端时,智能巡检装置停止,此时,供电拖缆张紧小车行走到供电拖缆接入柱处;第七步、当智能巡检装置从终点向起点巡检时,牵引绳的收放跟随机构同步开始收回牵引绳,在此过程中,同样要使往复连接在供电拖缆接入柱上的电源接入点、拖缆转向定滑轮和智能巡检装置的电源接入点之间的供电拖缆,始终处于张紧状态。
15.在牵引绳的收放跟随机构的t字形牵引绳支架的顶端横梁上,沿从左向右的方向,分别设置有第一定滑轮、第二定滑轮、第三定滑轮和第四定滑轮,在t字形牵引绳支架的底座板上,分别设置有牵引绳的缠绕线辊、缠绕线辊驱动电机和排绳器;连接在供电拖缆张紧小车上的牵引绳,沿从左向右的方向,依次通过第一定滑轮、第二定滑轮、第三定滑轮、第四定滑轮和排绳器后,缠绕在牵引绳的缠绕线辊上;在第二定滑轮与第三定滑轮之间的牵引绳上,悬吊有牵引绳u形缓冲区域动滑轮,在牵引绳u形缓冲区域动滑轮的轮轴上,吊接有配重支架,在配重支架上吊接有配重块,配重块下拉牵引绳,在第二定滑轮与第三定滑轮之间形成牵引绳的u形缓冲弯;当智能巡检装置停止时,配重块通过牵引绳u形缓冲区域动滑轮,使牵引绳通过供电拖缆张紧小车,对供电拖缆起到张紧的作用;当智能巡检装置启动时,突然启动的智能巡检装置通过供电拖缆牵引供电拖缆张紧小车,供电拖缆张紧小车拉拽牵引绳的端部,此时,牵引绳通过提升牵引绳u形缓冲区域动滑轮和其上的配重块,使牵引绳的u形缓冲弯减小,从而起到缓冲智能巡检装置突然启动对供电拖缆的冲击力,保证供电拖缆与智能巡检装置的可靠连接。
16.在智能巡检装置上,固定连接有之字形支架,在之字形支架的上端,连接有水平滑轨安装平台,在水平滑轨安装平台上,沿智能巡检装置的行走方向,固定设置有滑轨,在滑轨上活动设置有滑块,在滑块上,固定设置有拖缆固定连接悬臂块,供电拖缆的活动端固定连接在拖缆固定连接悬臂块上;智能巡检装置的电源接入线通过拖缆固定连接悬臂块与供电拖缆的活动端电连接在一起;当智能巡检装置突然启动或停止时,通过滑块相对于滑轨的移动,缓冲智能巡检装置的突然启动或停止,对供电拖缆的冲击,使供电拖缆与智能巡检装置的连接处不易损坏。
17.本发明实现了巡检装置不需要自带电池,通过拖缆方式直接对巡检装置供电,避免了由于对于智能巡检装置的电池充放电管理缺乏相关安全技术要求及检测方法等问题,无法应用及推广的问题;通过在巡检轨道内侧并列设置u形线槽,在u形线槽设置供电拖缆的张紧牵引小车,以一端衔接供电电缆另一端衔接牵引绳的方式,供电电缆不需要经过其
他复杂控制机构,保证了供电电缆与巡检装置,在整个巡检过程中的可靠连接,实现了供电电缆和牵引绳的功能分离与性能融合;通过设置张紧装置、收放线装置,当巡检装置运行方向及运行速度与收放线的收放线方向和收放线速度发生变化时,直接体现在张紧装置的方向检测组件和位置检测组件上,并将反馈信号反馈到收放线装置控制单元,从而形成循环反馈,实现了巡检装置与收放线装置运动平衡。
附图说明
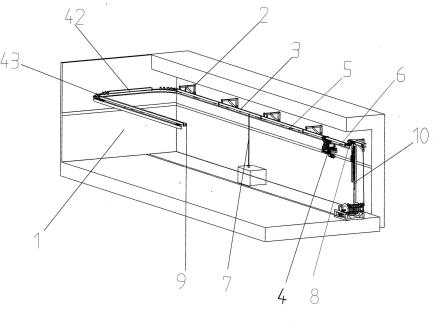
18.图1是本发明的结构示意图;图2是本发明的供电拖缆29的布设结构示意图;图3是本发明的牵引绳13的布设结构示意图;图4是本发明的供电拖缆张紧小车6的结构示意图;图5是本发明的智能巡检装置4的供电拖缆接入的结构示意图;图6是本发明的之字形支架44上的滑台的结构示意图;其中附图标记为:1-巡检巷道、2-悬臂支架、3-巡检轨道、4-智能巡检装置、5
‑ꢀ
u形线槽、6-供电拖缆张紧小车、7-供电拖缆接入柱、8-起始端、9-终点端、10-收放跟随机构、11-缠绕线辊、12-缠绕线辊驱动电机、13-牵引绳、14-t字形牵引绳支架、15-第一定滑轮、16-第二定滑轮、17-第三定滑轮、18-第四定滑轮、19-排绳器、20-牵引绳u形缓冲区域动滑轮、21-配重支架、22-配重块、23-第一定滑轮旋转方向识别传感器、24-配重块升降行程识别传感器、25-车体架、26-左导向限位轮、27-右导向限位轮、28-拖缆转向定滑轮、29-供电拖缆、30-行走轮、31-水平滑轨安装平台、32-滑轨、33-滑块、34-悬臂块、35-摆臂销轴安装立板、36-左l形摆臂销轴、37-右l形摆臂销轴、38-左l形摆臂、39-右l形摆臂、40-拉簧、41-摆臂压力传感器、42-u形巡检轨道、43-竖直辊筒、44-之字形支架、45-电源接入线。
具体实施方式
19.下面结合附图对本发明进行详细说明:一种智能巡检装置供电拖缆的布设及张紧机构,包括巡检巷道1、智能巡检装置4和智能巡检装置的供电拖缆29,在巡检巷道1内的墙壁上,设置有悬臂支架2,在悬臂支架2上,设置有智能巡检装置的巡检轨道3,在巡检轨道3上设置有智能巡检装置4;在巡检轨道3的内侧,固定设置有u形线槽5,u形线槽5作为供电拖缆跟随智能巡检装置的行走轨道,u形线槽5与巡检轨道3是平行并列设置的;在u形线槽5中,活动设置有供电拖缆张紧小车6,在供电拖缆张紧小车6上,设置有拖缆转向定滑轮28,供电拖缆张紧小车6没有动力,是通过供电拖缆的牵引,或在牵引绳13的牵引下,在u形线槽5中行走;在巡检巷道1的中点处,设置有供电拖缆接入柱7,供电拖缆29的长度为巡检轨道3总长度的一半,将智能巡检装置4的供电拖缆设置在巡检轨道3的中间位置,可实现用巡检轨道总长度的一半长度的拖缆,即可实现最整个巡检轨道的全程巡检;供电拖缆29被布设在u形线槽5中,供电拖缆29的固定端连接在供电拖缆接入柱7上,供电拖缆29的活动端绕过拖缆转向定滑轮28后,连接在智能巡检装置4上,使供电拖缆29的一端固定在供电拖缆接入柱7上,供电拖缆29的另一端固定在智能巡检装置4上,而整条供电拖缆29的中部被撑在供电拖缆张紧小车6上的拖缆转向定滑轮28上,形成往复回绕的状态;在巡检轨道3的起始端8的右侧,固定设置有牵引绳的收放跟随机
构10,在牵引绳的收放跟随机构10上设置有可收放的牵引绳13,牵引绳13的端头连接在供电拖缆张紧小车6的右端;牵引绳的收放跟随机构10,通过牵引绳13对供电拖缆张紧小车6的牵引,使绕过拖缆转向定滑轮28的供电拖缆29始终保持在张紧状态下;当智能巡检装置4向左行走l长距离时,供电拖缆张紧小车6向左行走的l的一般长的距离。
20.智能巡检装置4是在巡检轨道3的起始端8与巡检轨道3的终点端9之间进行往复巡检运行的;当智能巡检装置4到达巡检轨道3的终点端9时,供电拖缆张紧小车6到达供电拖缆接入柱7处,此时被释放的牵引绳13的长度为巡检轨道3长度的一半;当智能巡检装置4回到巡检轨道3的起始端8时,电拖缆张紧小车6回到巡检轨道3的起始端8处,此时牵引绳13全部被收回。
21.在牵引绳的收放跟随机构10的t字形牵引绳支架14的顶端横梁上,沿从左向右的方向,分别设置有第一定滑轮15、第二定滑轮16、第三定滑轮17和第四定滑轮18,在t字形牵引绳支架14的底座板上,分别设置有牵引绳的缠绕线辊11、缠绕线辊驱动电机12和排绳器19;连接在供电拖缆张紧小车6右端的牵引绳13,沿从左向右的方向,依次通过第一定滑轮15、第二定滑轮16、第三定滑轮17、第四定滑轮18和排绳器19后,缠绕在牵引绳的缠绕线辊11上;在第二定滑轮16与第三定滑轮17之间的牵引绳13上,悬吊有牵引绳u形缓冲区域动滑轮20,在牵引绳u形缓冲区域动滑轮20的轮轴上,吊接有配重支架21,在配重支架21上吊接有配重块22;在第一定滑轮15一侧的t字形牵引绳支架14的顶端横梁上,设置有第一定滑轮旋转方向识别传感器23,当第一定滑轮旋转方向识别传感器23识别到第一定滑轮15旋转时,发信号给缠绕线辊驱动电机12,缠绕线辊驱动电机12驱动牵引绳的缠绕线辊11旋转,实现对牵引绳13的收或放;在t字形牵引绳支架14的立柱上,设置有配重块升降行程识别传感器24;当配重块升降行程识别传感器24识别到超过升降范围值的情况下,说明供电拖缆出现卡滞或过度松弛现象,将对智能巡检装置4发出停车信号,以免拖缆被拽断或被折弯损坏。
22.在智能巡检装置4上,固定连接有之字形支架44,在之字形支架44的上端,连接有水平滑轨安装平台31,在水平滑轨安装平台31上,沿智能巡检装置4的行走方向,固定设置有滑轨32,在滑轨32上活动设置有滑块33,在滑块33上,固定设置有拖缆固定连接悬臂块34,供电拖缆29的活动端固定连接在拖缆固定连接悬臂块34上;智能巡检装置4的电源接入线45通过拖缆固定连接悬臂块34与供电拖缆29的活动端电连接在一起。
23.在水平滑轨安装平台31上,设置有摆臂销轴安装立板35,在摆臂销轴安装立板35上,分别设置有左l形摆臂销轴36和右l形摆臂销轴37,在左l形摆臂销轴36上铰接有左l形摆臂38,左l形摆臂38设置在滑块33的左立面的外侧,在右l形摆臂销轴37上铰接有右l形摆臂39,右l形摆臂39设置在滑块33的右立面的外侧,在左l形摆臂38的顶端与右l形摆臂39的顶端之间,设置有拉簧40,在水平滑轨安装平台31的下底面上,设置有摆臂压力传感器41,左l形摆臂38的下横杆和右l形摆臂39的下横杆,均设置在摆臂压力传感器41的下方;当摆臂压力传感器41监测得到的压力值超范围时,说明供电拖缆工作出现异常,应尽快使智能巡检装置4停止行走,避免拖缆被损坏。
24.供电拖缆张紧小车6的车体架25为一长方体形架体,在车体架25的底端分别设置有四个行走轮30,在车体架25的左端设置有左导向限位轮26,在车体架25的右端设置有右导向限位轮27,在左导向限位轮26与右导向限位轮27之间,设置有拖缆转向定滑轮28,拖缆
转向定滑轮28是沿上下方向竖直设置的,供电拖缆29是从拖缆转向定滑轮28的上端缠绕到拖缆转向定滑轮28上,再从拖缆转向定滑轮28的下端向左引出的;车体架25通过四个行走轮30活动设置在u形线槽5内的底面上,左导向限位轮26和右导向限位轮27,均活动设置在u形线槽5内的前后两侧面之间。
25.供电拖缆接入柱7左侧的巡检轨道3为u形巡检轨道42,在u形巡检轨道42的转弯处,沿转弯方向,间隔地成对地设置有竖直辊筒43,供电拖缆13是设置在成对的竖直辊筒43之间的;在转弯处为了避免拖缆被磨损,通过拖缆与两限位辊轮的滚动连接,减少其摩擦力,使供电拖缆顺畅通过转弯处。
26.一种巡检中智能巡检装置的供电拖缆的布设及跟随方法,包括巡检巷道1、智能巡检装置4、智能巡检装置的供电拖缆29和牵引绳的收放跟随机构10,在巡检巷道1内的墙壁上,设置有悬臂支架2,在悬臂支架2上,设置有智能巡检装置的巡检轨道3,在巡检轨道3上设置有智能巡检装置4,在巡检轨道3的内侧,固定设置有u形线槽5,u形线槽5与巡检轨道3是平行并列设置的;其特征在于以下步骤:第一步、在巡检轨道3的起始端8处的u形线槽5内,活动设置供电拖缆张紧小车6,在供电拖缆张紧小车6上,设置有拖缆转向定滑轮28;将牵引绳的收放跟随机构10固定设置在巡检轨道3的起始端8外侧,在牵引绳的收放跟随机构10上,设置有可收放的牵引绳13;在巡检巷道1的中点处,设置供电拖缆接入柱7,在供电拖缆接入柱7上设置有供电电源接入点;第二步、将巡检轨道3的总长度的一半,作为供电拖缆29的总长度,制作供电拖缆29;将智能巡检装置4设置在巡检轨道3的起始端8处;第三步、先将供电拖缆29的始端,固定连接在供电拖缆接入柱7上的电源接入点上,再将供电拖缆29布设在u形线槽5中,使供电拖缆29的终端,绕过供电拖缆张紧小车6上设置的拖缆转向定滑轮28后,再沿u形线槽5返回后,连接在智能巡检装置的电源接入点上;第四步、将可收放的牵引绳13的端部与供电拖缆张紧小车6的右端固定连接在一起,并使连接在供电拖缆张紧小车6上的可收放的牵引绳13与绕过拖缆转向定滑轮28的供电拖缆29,呈一字形反方向布置状态;第五步、启动智能巡检装置4,智能巡检装置4从巡检巷道1的起点处向着巡检巷道1的中点处开始行走,智能巡检装置4通过供电拖缆29对拖缆转向定滑轮28的作用,使供电拖缆张紧小车6跟随智能巡检装置4,在u形线槽5中,也向巡检巷道1的中点处方向移动;与此同时,牵引绳的收放跟随机构10同步释放牵引绳13,在此过程中,从供电拖缆接入柱7上的电源接入点到拖缆转向定滑轮28处的供电拖缆29的长度逐渐减少,而从拖缆转向定滑轮28到智能巡检装置4的供电拖缆29的长度逐渐增加,往复连接在供电拖缆接入柱7上的电源接入点、拖缆转向定滑轮28和智能巡检装置的电源接入点之间的供电拖缆29始终是处于张紧状态的;第六步、当智能巡检装置4行走过供电拖缆接入柱7上的电源接入点处后,从供电拖缆接入柱7上的电源接入点到拖缆转向定滑轮28处的供电拖缆29的长度,就会小于从拖缆转向定滑轮28到智能巡检装置4的供电拖缆29的长度,牵引绳的收放跟随机构10,继续同步释放牵引绳13,往复连接在供电拖缆接入柱7上的电源接入点、拖缆转向定滑轮28和智能巡检装置的电源接入点之间的供电拖缆29始终处于张紧状态;直至智能巡检装置4巡检到
巡检轨道3的终点端9时,智能巡检装置4停止,此时,供电拖缆张紧小车6行走到供电拖缆接入柱7处;第七步、当智能巡检装置4从终点向起点巡检时,牵引绳的收放跟随机构10同步开始收回牵引绳13,在此过程中,同样要使往复连接在供电拖缆接入柱7上的电源接入点、拖缆转向定滑轮28和智能巡检装置的电源接入点之间的供电拖缆29,始终处于张紧状态。
27.在牵引绳的收放跟随机构10的t字形牵引绳支架14的顶端横梁上,沿从左向右的方向,分别设置有第一定滑轮15、第二定滑轮16、第三定滑轮17和第四定滑轮18,在t字形牵引绳支架14的底座板上,分别设置有牵引绳的缠绕线辊11、缠绕线辊驱动电机12和排绳器19;连接在供电拖缆张紧小车6上的牵引绳13,沿从左向右的方向,依次通过第一定滑轮15、第二定滑轮16、第三定滑轮17、第四定滑轮18和排绳器19后,缠绕在牵引绳的缠绕线辊11上;在第二定滑轮16与第三定滑轮17之间的牵引绳13上,悬吊有牵引绳u形缓冲区域动滑轮20,在牵引绳u形缓冲区域动滑轮20的轮轴上,吊接有配重支架21,在配重支架21上吊接有配重块22,配重块22下拉牵引绳13,在第二定滑轮16与第三定滑轮17之间形成牵引绳13的u形缓冲弯;当智能巡检装置4停止时,配重块22通过牵引绳u形缓冲区域动滑轮20,使牵引绳13通过供电拖缆张紧小车6,对供电拖缆29起到张紧的作用;当智能巡检装置4启动时,突然启动的智能巡检装置4通过供电拖缆29牵引供电拖缆张紧小车6,供电拖缆张紧小车6拉拽牵引绳13的端部,此时,牵引绳13通过提升牵引绳u形缓冲区域动滑轮20和其上的配重块22,使牵引绳13的u形缓冲弯减小,从而起到缓冲智能巡检装置4突然启动对供电拖缆29的冲击力,保证供电拖缆29与智能巡检装置4的可靠连接。
28.在智能巡检装置4上,固定连接有之字形支架44,在之字形支架44的上端,连接有水平滑轨安装平台31,在水平滑轨安装平台31上,沿智能巡检装置4的行走方向,固定设置有滑轨32,在滑轨32上活动设置有滑块33,在滑块33上,固定设置有拖缆固定连接悬臂块34,供电拖缆29的活动端固定连接在拖缆固定连接悬臂块34上;智能巡检装置4的电源接入线45通过拖缆固定连接悬臂块34与供电拖缆29的活动端电连接在一起;当智能巡检装置4突然启动或停止时,通过滑块33相对于滑轨32的移动,缓冲智能巡检装置4的突然启动或停止,对供电拖缆29的冲击,使供电拖缆29与智能巡检装置4的连接处不易损坏。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1