电机堵转保护控制方法、装置、电子设备及存储介质与流程
本技术涉及电机控制,尤其涉及一种电机堵转保护控制方法、装置、电子设备及存储介质。
背景技术:
1、循环水泵在使用过程中,由于水质的问题,存在异物堵转的情况。当循环水泵电机堵转时,会造成系统工作异常甚至电机和驱动板烧毁。因此异物堵转检测和破障是循环水泵必要的安全保护功能。
2、在相关技术中,通常采用以下方案:1):采用位置传感器比如霍尔、编码器等,测试转子位置,并根据位置变化情况确定堵转和堵转处理程序,其具有成本高,结构复杂,安装条件苛刻以及位置检测器件故障率高等缺点。2):采用流量计传感器,根据流量确定堵转情况的发生,其堵转判断的实时性差,堵转发生到判定结果需要较长的时间,在此判定时间内,容易造成定子绕组过热和驱动金氧半场效晶体管过流;另外,电机堵转和管道堵塞都会引起流量异常,因此会引起误定。3):对堵转特殊处理,通过检测母线电流及相电流,根据电机堵转时,母线电流和相电流异常,间接判断堵转情况的发生,其堵转判断不准确,母线过流或者相电流异常可能由电压异常、控制板元器件损坏、过功率等原因造成,原因逻辑不唯一;另外,堵转判断的实时性差,在堵转发生时,概率性可能无法造成母线过流或者相电流异常的故障,进而错误进入启动保护。
3、因此,相关技术中电机堵转检测的可靠性和有效性较低,且无法针对特定的堵转类型进行有效的破障处理。
4、针对上述的问题,尚未提出有效地解决方案。
技术实现思路
1、本技术实施例提供了一种电机堵转保护控制方法、装置、电子设备及存储介质,以至少解决相关技术中电机堵转检测的可靠性和有效性较低,无法针对特定的堵转类型进行有效的破障处理的技术问题。
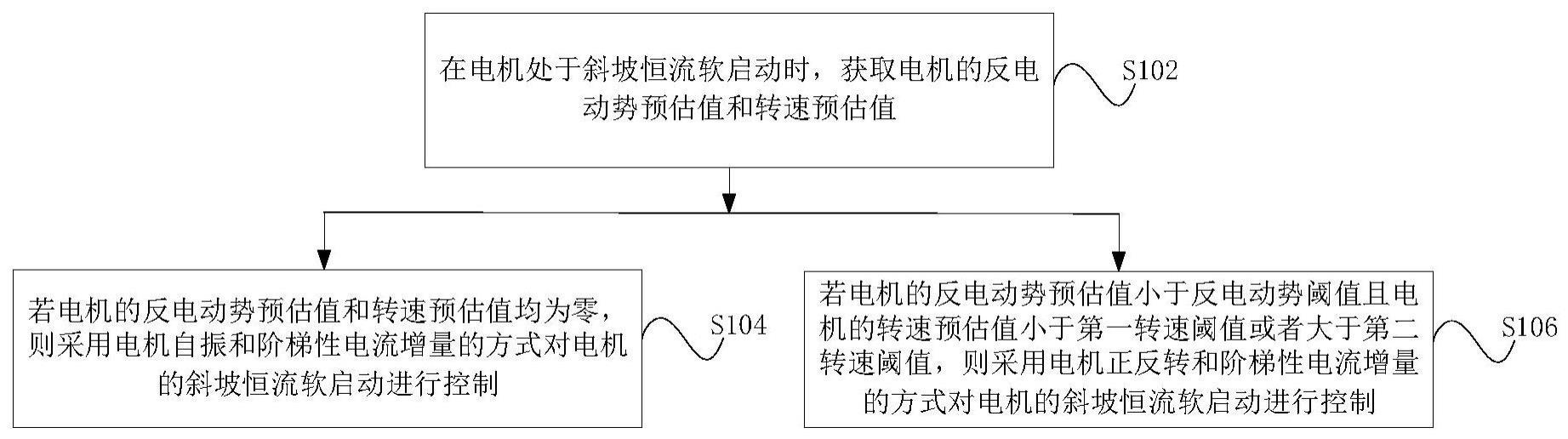
2、根据本技术实施例的一个方面,提供了一种电机堵转保护控制方法,包括:在电机处于斜坡恒流软启动时,获取所述电机的反电动势预估值和转速预估值;若所述电机的反电动势预估值和转速预估值均为零,则采用电机自振和阶梯性电流增量的方式对所述电机的斜坡恒流软启动进行控制;若所述电机的反电动势预估值小于反电动势阈值且所述电机的转速预估值小于第一转速阈值或者大于第二转速阈值,则采用电机正反转和阶梯性电流增量的方式对所述电机的斜坡恒流软启动进行控制;其中,所述第一转速阈值为所述电机处于匀速运行状态时的最低转速值,所述第二转速阈值为所述电机处于匀速运行状态时的最高转速值,所述反电动势阈值为所述电机处于匀速运行状态时的最低转速值关联的反电动势值。
3、可选地,所述电机自振的方式包括:依次按照第一合成磁场方向变换至第二合成磁场方向,第二合成磁场方向变换至第三合成磁场方向,第三合成磁场方向变换至第四合成磁场方向,第四合成磁场方向变换至第五合成磁场方向,第五合成磁场方向变换至第六合成磁场方向以及第六合成磁场方向变换至第一合成磁场方向确定电机绕组的通电时序使得所述电机自振;其中,第二合成磁场方向、第三合成磁场方向、第四合成磁场方向、第五合成磁场方向和第六合成磁场方向相对于所述第一合成磁场方向的变化角度逐渐增大,第一合成磁场方向和第二合成磁场方向的变换角度为60°,第二合成磁场方向和第三合成磁场方向的变换角度为60°,第三合成磁场方向和第四合成磁场方向的变换角度为60°,第四合成磁场方向和第五合成磁场方向的变换角度为60°,第五合成磁场方向和第六合成磁场方向的变换角度为60°以及第六合成磁场方向和第一合成磁场方向的变换角度为60°。
4、可选地,在所述电机自振的过程中,所述方法还包括:检测所述电机绕组的当前相电流;若所述电机绕组的当前相电流大于相电流阈值,则下一次的所述电机自振的过程中屏蔽关联的合成磁场方向对应的通电时序。
5、可选地,所述电机正反转的方式包括:依次按照第一合成磁场方向变换至第二合成磁场方向、第三合成磁场方向、第四合成磁场方向、第五合成磁场方向、第六合成磁场方向、第五合成磁场方向、第四合成磁场方向、第三合成磁场方向、第二合成磁场方向和第一合成磁场方向确定电机绕组的通电时序使得所述电机正反转;其中,第二合成磁场方向、第三合成磁场方向、第四合成磁场方向、第五合成磁场方向和第六合成磁场方向相对于所述第一合成磁场方向的变化角度逐渐增大,第一合成磁场方向和第二合成磁场方向的变换角度为60°,第二合成磁场方向和第三合成磁场方向的变换角度为60°,第三合成磁场方向和第四合成磁场方向的变换角度为60°,第四合成磁场方向和第五合成磁场方向的变换角度为60°,第五合成磁场方向和第六合成磁场方向的变换角度为60°以及第六合成磁场方向和第一合成磁场方向的变换角度为60°。
6、可选地,在所述电机正反转的过程中,所述方法还包括:检测所述电机绕组的当前相电流;若所述电机绕组的当前相电流大于相电流阈值,则下一次的所述电机正反转的过程中下调通电时序的占空比。
7、可选地,所述阶梯性电流增量的方式包括:步骤1,确定电机绕组的当前相电流,以及按照所述当前相电流控制电机执行斜坡恒流软启动;步骤2,若所述电机执行斜坡恒流软启动成功,则将所述电机由斜坡恒流软启动转入匀速运行状态;步骤3,若所述电机执行斜坡恒流软启动失败,则记录所述电机的启动次数,将所述当前相电流和相电流增量值之和作为更新后的当前相电流,以及若所述电机的启动次数小于或者等于启动阈值,继续执行所述步骤1的步骤;步骤4,若所述电机的启动次数大于所述启动阈值,则确定所述电机执行斜坡恒流软启动失败。
8、可选地,获取所述电机的反电动势预估值和转速预估值,包括:获取所述电机的定子相电压和相电流;对所述电机的定子相电压和相电流进行矢量变换与坐标变换,得到所述电机的反电动势;确定所述电机的反电动势对应的所述电机的反电动势预估值和定子磁链角度;根据所述电机的转子与定子之间的功角角度和所述电机的定子磁链角度进行计算,得到所述电机的转子磁链角度;对电机的转子磁链角度进行求导,得到所述电机的转速预估值。
9、根据本技术实施例的另一个方面,还提供了一种电机堵转保护控制装置,包括:获取模块,用于在电机处于斜坡恒流软启动时,获取所述电机的反电动势预估值和转速预估值;第一控制模块,用于若所述电机的反电动势预估值和转速预估值均为零,则采用电机自振和阶梯性电流增量的方式对所述电机的斜坡恒流软启动进行控制;第二控制模块,用于若所述电机的反电动势预估值小于反电动势阈值且所述电机的转速预估值小于第一转速阈值或者大于第二转速阈值,则采用电机正反转和阶梯性电流增量的方式对所述电机的斜坡恒流软启动进行控制;其中,所述第一转速阈值为所述电机处于匀速运行状态时的最低转速值,所述第二转速阈值为所述电机处于匀速运行状态时的最高转速值,所述反电动势阈值为所述电机处于匀速运行状态时的最低转速值关联的反电动势值。
10、根据本技术实施例的另一个方面,还提供了一种电子设备,包括:处理器;用于存储处理器可执行指令的存储器;其中,所述处理器被配置为执行上述任一项所述的方法的步骤。
11、根据本技术实施例的另一个方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行上述中任一项所述的方法的步骤。
12、在本技术实施例中,采用在电机处于斜坡恒流软启动时,获取电机的反电动势预估值和转速预估值;若电机的反电动势预估值和转速预估值均为零,则采用电机自振和阶梯性电流增量的方式对电机的斜坡恒流软启动进行控制;若电机的反电动势预估值小于反电动势阈值且电机的转速预估值小于第一转速阈值或者大于第二转速阈值,则采用电机正反转和阶梯性电流增量的方式对电机的斜坡恒流软启动进行控制;其中,第一转速阈值为电机处于匀速运行状态时的最低转速值,第二转速阈值为电机处于匀速运行状态时的最高转速值,反电动势阈值为电机处于匀速运行状态时的最低转速值关联的反电动势值。也就是说,本技术实施例通过获取电机处于斜坡恒流软启动时的反电动势预估值和转速预估值;根据反电动势预估值和转速预估值判定电机的堵转类型,电机的反电动势预估值和转速预估值均为零为电机的第一堵转类型,则采用电机自振和阶梯性电流增量的方式对电机的斜坡恒流软启动进行控制;电机的反电动势预估值小于反电动势阈值且电机的转速预估值小于第一转速阈值或者大于第二转速阈值为电机的第二堵转类型,则采用电机正反转和阶梯性电流增量的方式对电机的斜坡恒流软启动进行控制,进而解决了相关技术中电机堵转检测的可靠性和有效性较低,无法针对特定的堵转类型进行有效的破障处理的技术问题,达到了提升电机堵转检测的可靠性和有效性,并针对特定的堵转类型进行有效的破障处理的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!