电动机控制方法及电动机控制装置与流程
本发明涉及根据位置指令控制电动机的方法及装置,特别涉及能够抑制被称为象限突起或粘滞运动(stick motion)的现象的发生的电动机控制方法及电动机控制装置。
背景技术:
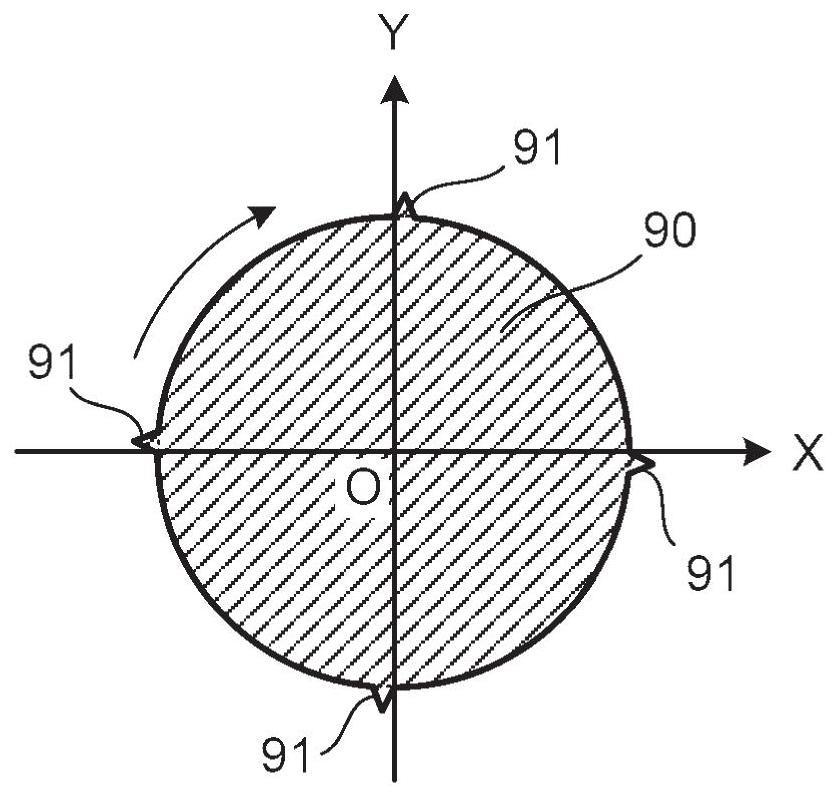
1、在根据位置指令对电动机进行伺服控制时,有时会发生被称为象限突起或粘滞运动的现象。该现象是因为,在电动机的旋转方向反转时等,由于速度接近0时的摩擦力的增加的影响或齿隙的影响而产生位置控制延迟,位置偏差暂时变大。图1是说明象限突起的图。如图所示,在具有正交的x轴及y轴且能够通过各轴的电动机使刀具在xy平面内移动的机床中,考虑在xy平面中在以原点o为中心的圆周上使刀具沿图示箭头方向移动来加工工件90。在x轴的电动机使旋转方向反转的定时,y轴的电动机以最高速度动作,在该定时,若在x轴上发生电动机的位置控制延迟,则在加工对象的工件90上产生从圆周向外侧方向飞出的突起91。这样的突起91沿着工件90的外周以等角度间隔产生在4处。该突起91在由xy平面定义的象限的边界附近产生,所以被称为象限突起。象限突起是由于电动机的速度从0开始上升时的位置控制延迟而引起位置偏差的暂时性增加而引起的,因此能够通过增大驱动电动机的控制器中的控制增益参数来抑制。然而,在增大了控制器的控制增益参数的情况下,在控制对象的系统的刚性较低的情况下会诱发振动,因而增大控制增益参数存在极限。因此,难以通过控制增益参数的调整来抑制象限突起的产生。
2、作为不依赖于控制增益参数的调整而抑制象限突起的产生的方法,已知例如以下记载的方法。专利文献1公开了如下内容:电动机的速度的变化例如为阶梯状,将向具有与位置控制延迟相同程度的时间常数的低通滤波器输入该阶梯状的变化而得到的结果与转矩指令相加。专利文献2公开了在控制机床的数值控制装置中,分析加工程序来计算各轴的实际移动量,并根据计算出的移动量进行空转修正。专利文献3公开了使用以加速度变化的变量来计算阶梯状变化的补偿量,并将该补偿量与位置指令相加。专利文献4公开了将由s形函数表示的补偿值与转矩指令相加。专利文献5公开了如下内容:反复驱动电动机来求出位置偏差,根据得到的位置偏差进行学习来取得近似曲线,根据得到的近似曲线产生修正指令并与速度指令或转矩指令相加。
3、[现有技术文献]
4、[专利文献]
5、专利文献1:日本专利特开2020-202603号公报
6、专利文献2:日本专利第6494874号公报
7、专利文献3:日本专利第4510723号公报
8、专利文献4:日本专利第6185374号公报
9、专利文献5:日本专利特开2012-93982号公报
技术实现思路
1、发明所要解决的技术问题
2、在不调整控制增益参数而抑制象限突起的产生的技术中,专利文献2~4所记载的技术具有用于计算修正所使用的值或补偿量、补偿值的运算负荷较大的问题。另外,专利文献5所记载的技术存在需要进行学习而需要用于学习的作业工时的问题。
3、本发明的目的在于提供一种电动机控制方法和电动机控制装置,其能够以较少的运算量来抑制象限突起或粘滞运动的发生。
4、用于解决技术问题的技术手段
5、基于本发明的电动机控制方法根据位置指令和从电动机反馈的位置,产生针对电动机的转矩指令并进行电动机的伺服控制,其中,基于根据位置指令计算的速度值来检测电动机的速度上升,在检测出速度上升时,产生由二阶脉冲响应来表示的补偿值,基于补偿值来补偿针对电动机的转矩指令。
6、电动机的旋转方向反转时等产生的象限突起或粘滞运动是由于电动机的速度从0开始上升时的位置控制延迟而产生的。因此,在基于本发明的电动机控制方法中,在检测出电动机的速度上升时,进行针对转矩指令的补偿以补偿位置控制延迟。此时,作为补偿值,使用由二阶脉冲响应来表示的值。这里,二阶脉冲响应是指将脉冲或脉冲函数输入到由二阶延迟元件表示的模型时作为输出而得到的响应。通过由二阶脉冲响应表示的补偿值来补偿转矩指令相当于进行专门用于位置控制延迟的补偿的前馈补偿,所以根据基于本发明的电动机控制方法,不进行控制器中的控制增益参数的调整,就能够抑制象限突起的产生。由于表示二阶脉冲响应的函数的形状简单,因此能够以较少的运算量产生补偿值。
7、在基于本发明的电动机控制方法中,优选为能够对(a)从电动机的速度上升到补偿值的上升为止的时间即延迟时间、(b)从补偿值的上升到补偿值示出峰顶为止的时间即峰顶时间、以及(c)峰顶中的补偿值的值即峰值中的至少一个进行调整。通过使得能够调整这些参数,从而能够在各种系统中对每个电动机适当地进行象限突起的产生的抑制。
8、在基于本发明的电动机控制方法中,优选为对与速度上升对应的电动机的每个旋转方向设定延迟时间和峰值。通过这样构成,从而即使在象限突起的产生状况根据电动机的旋转方向而不同的情况下,也能够适当地补偿象限突起。
9、在基于本发明的电动机控制方法中,优选为通过将补偿值与转矩指令相加来进行转矩指令的补偿。通过将补偿值与转矩指令相加,从而能够减少用于补偿的运算量。
10、基于本发明的电动机控制装置是根据位置指令进行电动机的伺服控制的电动机控制装置,其包括:控制器,其根据位置指令和从电动机反馈的位置来产生针对电动机的转矩指令;以及象限突起补偿部,其基于根据位置指令计算的速度值来检测电动机的速度上升,在检测到速度上升时,产生由二阶脉冲响应来表示的补偿值,基于补偿值来补偿转矩指令。
11、在基于本发明的电动机控制装置中,设置有象限突起补偿部,该象限突起补偿部在检测出电动机中的速度上升时产生由二阶脉冲响应来表示的补偿值,通过该补偿值进行针对转矩指令的补偿。通过由二阶脉冲响应来表示的补偿值对转矩指令进行补偿相当于进行专用于位置控制延迟的补偿的前馈补偿,所以根据基于本发明的电动机控制装置,能够抑制象限突起的产生,而不进行控制器中的控制增益参数的调整,并且不会带来运算负荷的增大。
12、在基于本发明的电动机控制装置中,象限突起补偿部也可以具备:速度指令值获取部,其根据位置指令来计算速度指令,以作为速度值;延迟计数器,其设定从速度上升到补偿值的上升为止的时间即延迟时间,在基于速度指令检测出速度上升时开始延迟时间的计数;以及补偿值计算部,其设定从补偿值的上升到补偿值示出峰顶为止的时间即峰顶时间和峰顶中的补偿值的值即峰值,在延迟计数器完成了延迟时间的计数时产生补偿值。通过使用这样的象限突起补偿部,从而能够容易地进行补偿值的产生。
13、在基于本发明的电动机控制装置中,优选为针对电动机的每个旋转方向设置补偿值计算部,在延迟计数器中针对每个旋转方向设定延迟时间。通过这样构成,即使在象限突起的产生状况根据电动机的旋转方向而不同的情况下,也能够良好地补偿象限突起。
14、在基于本发明的电动机控制装置中,优选为还具备参数设定部,该参数设定部基于外部输入对延迟计数器设定延迟时间,并且对补偿值计算部设定峰顶时间和峰值。由此能够通过外部输入设定延迟时间、峰顶时间以及峰值,从而能够在各种系统中对每个电动机良好地进行象限突起的产生的抑制。
15、在本发明的电动机控制装置中,也可以通过将补偿值与转矩指令相加来进行转矩指令的补偿。通过将补偿值与转矩指令相加,从而能够减少用于补偿的运算量。
16、发明效果
17、根据本发明,能够以较少的运算量良好地抑制象限突起或粘滞运动的发生。
- 还没有人留言评论。精彩留言会获得点赞!