一种行走机构及除冰装置
本发明涉及输电线维护设备,具体而言,尤其是涉及一种行走机构及除冰装置。
背景技术:
1、现代社会的生产与生活对电力的需求越来越大,而电线作为电力的传导者起到很大的作用,在偏北之地下雪时间较长温度较低,从而结冰时间长,在电线结冰情况下不及时除冰电线承受的重量较大从而断裂。
2、传统的除冰方式多为人工敲打电缆线,振动电线去除结冰,采用这种方法非常危险,同时除冰效率不高。
3、目前,为了提高除冰效率,市面上出现了自动除冰装置,通过自动在电线上行走,从而实现自动除冰,在现有技术中,除冰装置通常设置有行走机构,用于与输电线相互接触,从而实现整个除冰装置在输电线路上的运动,如图1所示,在申请号为:201621091597.6,专利名称为:一种输电线路双导线多功能除冰机器人的实用新型专利中,其通过行走轮的结构设计,实现除冰机器人的移动,但是采用该种结构设计,基于行走轮将除冰机器人挂在输电线路上,除冰机器人的稳定性不能够保证;且输电线在生产过程以及使用过程中,均可能出现鼓包的情况,采用该种行走轮结构更容易存在行走轮与输电线脱离的风险。
4、有鉴于此,特提出本申请。
技术实现思路
1、针对于上述问题,第一方面,本发明实施例提供一种行走机构,通过伸缩机构的结构设计,能够通过伸缩实现所述配合面与输电线的接触,从而保证行走机构的配合面与输电线的贴合,保证两者的配合强度,保证机器人的稳定性;第二方面,本发明实施例还提供了一种除冰装置,基于上述行走机构,能够保证除冰装置在输电线上行走的稳定性。
2、本发明实施例通过下述技术方案实现:
3、第一方面
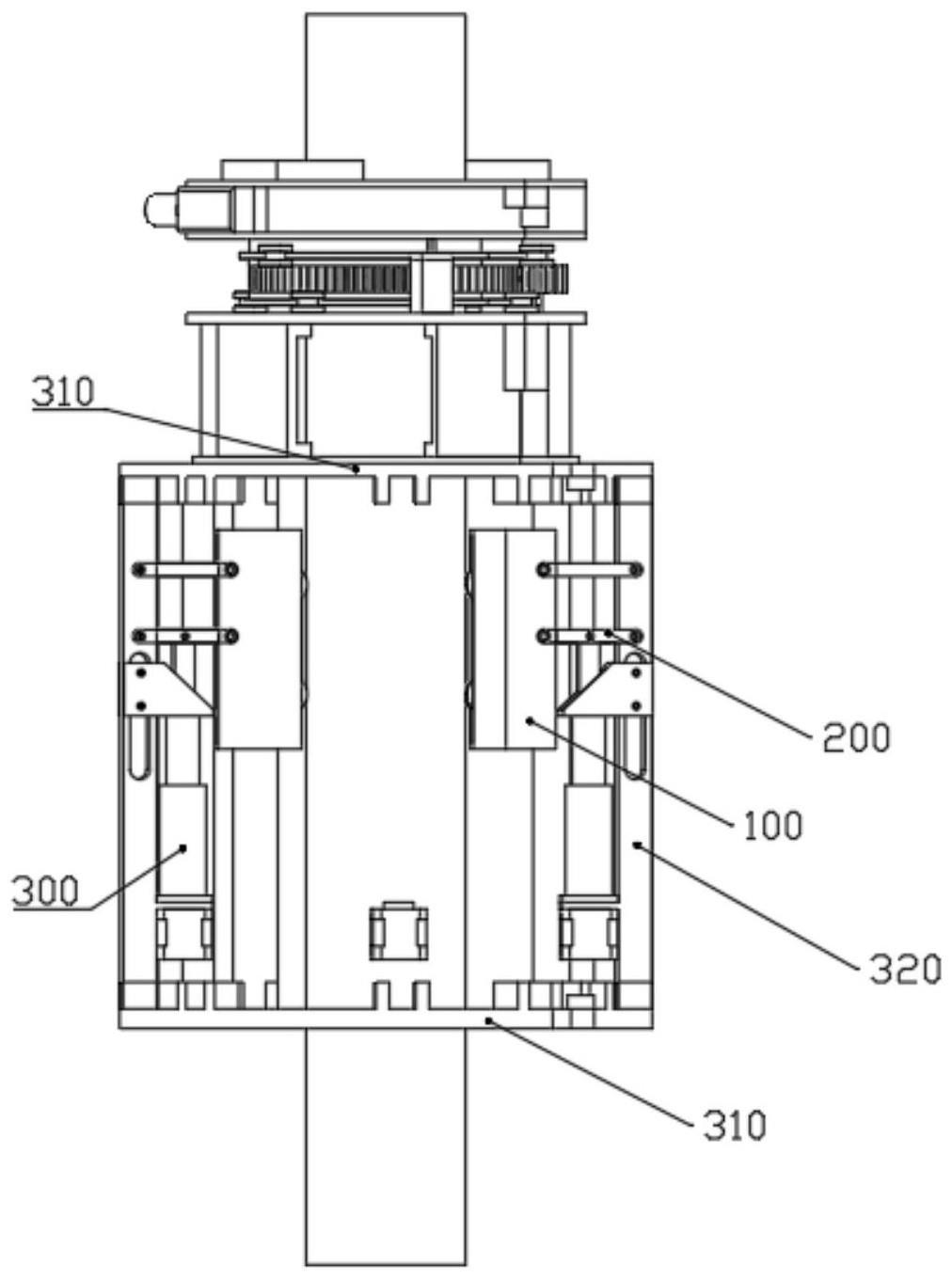
4、本发明实施例提供了一种行走机构,包括,行走结构,所述行走结构包括至少两个行走单元,所述行走单元具有用于与输电线配合的配合面,两个所述配合面相互配合,用于实现行走机构沿输电线轴线上的运动;其中,所述行走单元包括行走本体,所述配合面位于所述行走本体的一侧,所述行走本体的另一侧设置有连杆,所述连杆的一端与所述行走本体铰接,所述连杆具有连接部,所述连接部用于与伸缩结构连接;当所述伸缩机构伸缩时,所述行走本体能够沿垂直于所述伸缩机构的轴线方向运动。
5、在本方案中,所述行走机构,包括至少两个行走单元,在利用所述行走机构行走时,两个所述行走单元的配合面与输电线相互接触,从而实现行走结构的行走,且所述行走单元包括行走本体,所述行走本体设置有连杆,所述连杆与所述行走本体铰接,且所述连杆还设置有连接部,所述连接部与所述伸缩机构连接,当所述行走机构与输电线配合,所述输电线出现鼓包等情况时,所述配合面与鼓包相互配合,从而推动所述行走本体向远离输电线的方向运动,且由于所述伸缩机构的结构设计,能够通过伸缩实现所述配合面与输电线的接触,从而保证行走机构的配合面与输电线的贴合,保证两者的配合强度,保证机器人的稳定性。
6、进一步的,所述行走本体包括外壳,所述外壳设置有容置槽,所述容置槽设置有皮带轮行走机构,所述皮带轮行走机构包括间隔设置的两个滚轮以及套设在两个所述滚轮上的皮带。
7、进一步的,所述皮带轮行走机构还设置有第一驱动件,所述第一驱动件用于驱动所述滚轮的转动。
8、进一步的,所述行走单元为4个,当4个所述行走单元用于与输电线配合时,其中两个所述行走单元的连线以及另外两个所述行走单元的连线均与所述输电线的直径共线。
9、进一步的,其中两个所述行走单元的连线与另外两个所述行走单元的连线相互垂直设置。
10、进一步的,所述行走机构还包括壳体结构,所述壳体结构包括两个间隔设置的安装板,所述行走结构安装在两个所述安装板的间隔空间中。
11、进一步的,所述壳体结构还包括安装杆,所述安装杆的一端与其中一个所述安装板连接,所述安装杆的另一端与其中另一个所述安装板连接;其中,所述连杆的另一端与所述安装杆铰接。
12、第二方面
13、本发明实施例还提供了一种除冰装置,包括上述的行走机构,还包括除冰刀结构,所述除冰刀结构位于所述行走机构的一端。
14、进一步的,所述除冰刀结构包括环状壳体,所述环状壳体的内环用于与输电线相互配合;还包括除雪刀结构,所述除雪刀结构包括两个除雪刀单元,两个所述除雪刀单元相互配合用于实现输电线上的积雪去除;其中,所述除雪刀单元包括除雪刀本体以及驱动结构,所述驱动结构用于驱动所述除雪刀本体沿所述壳体内环的直径方向运动。
15、进一步的,所述驱动结构包括螺杆、滑块以及第二驱动件,所述滑块具有与所述螺杆配合的螺孔,所述第二驱动件用于驱动所述螺杆转动实现所述滑块沿所述螺杆所述滑块的轴线方向运动;其中,所述滑块与所述除雪刀本体固定连接。
16、本发明与现有技术相比,具有如下的优点和有益效果:
17、本发明实施例提供了一种行走机构,包括至少两个行走单元,在利用所述行走机构行走时,两个所述行走单元的配合面与输电线相互接触,从而实现行走结构的行走,且所述行走单元包括行走本体,所述行走本体设置有连杆,所述连杆与所述行走本体铰接,且所述连杆还设置有连接部,所述连接部与所述伸缩机构连接,当所述行走机构与输电线配合,所述输电线出现鼓包等情况时,所述配合面与鼓包相互配合,从而推动所述行走本体向远离输电线的方向运动,且由于所述伸缩机构的结构设计,能够通过伸缩实现所述配合面与输电线的接触,从而保证行走机构的配合面与输电线的贴合,保证两者的配合强度,保证机器人的稳定性;
18、本发明实施例还提供了一种除冰装置,基于上述行走机构,能够保证除冰装置在输电线上行走的稳定性。
技术特征:
1.一种行走机构,其特征在于,包括,
2.根据权利要求1所述的一种行走机构,其特征在于,所述行走本体(100)包括外壳,所述外壳设置有容置槽,所述容置槽设置有皮带轮行走机构,所述皮带轮行走机构包括间隔设置的两个滚轮以及套设在两个所述滚轮上的皮带。
3.根据权利要求2所述的一种行走机构,其特征在于,所述皮带轮行走机构还设置有第一驱动件,所述第一驱动件用于驱动所述滚轮的转动。
4.根据权利要求1所述的一种行走机构,其特征在于,所述行走单元为4个,当4个所述行走单元用于与输电线配合时,其中两个所述行走单元的连线以及另外两个所述行走单元的连线均与所述输电线的直径共线。
5.根据权利要求4所述的一种行走机构,其特征在于,其中两个所述行走单元的连线与另外两个所述行走单元的连线相互垂直设置。
6.根据权利要求1-5任一所述的一种行走机构,其特征在于,所述行走机构还包括壳体结构,所述壳体结构包括两个间隔设置的安装板(310),所述行走结构安装在两个所述安装板(310)的间隔空间中。
7.根据权利要求6所述的一种行走机构,其特征在于,所述壳体结构还包括安装杆(320),所述安装杆(320)的一端与其中一个所述安装板(310)连接,所述安装杆(320)的另一端与其中另一个所述安装板(310)连接;其中,所述连杆(200)的另一端与所述安装杆(320)铰接。
8.一种除冰装置,其特征在于,包括权利要求1-7任一所述的行走机构,还包括除冰刀结构,所述除冰刀结构位于所述行走机构的一端。
9.根据权利要求8所述的一种除冰装置,其特征在于,所述除冰刀结构包括环状壳体(410),所述环状壳体(410)的内环用于与输电线相互配合;还包括除雪刀结构,所述除雪刀结构包括两个除雪刀单元,两个所述除雪刀单元相互配合用于实现输电线上的积雪去除;其中,所述除雪刀单元包括除雪刀本体(420)以及驱动结构,所述驱动结构用于驱动所述除雪刀本体沿所述壳体(100)内环的直径方向运动。
10.根据权利要求9所述的一种行走机构,其特征在于,所述驱动结构包括螺杆(431)、滑块(432)以及第二驱动件(433),所述滑块(432)具有与所述螺杆(431)配合的螺孔,所述第二驱动件(433)用于驱动所述螺杆(431)转动实现所述滑块(432)沿所述螺杆所述滑块(432)的轴线方向运动;其中,所述滑块(432)与所述除雪刀本体(420)固定连接。
技术总结
本发明涉及输电线维护设备技术领域,具体提供一种行走机构及除冰装置,该行走机构,包括至少两个行走单元,行走单元具有用于与输电线配合的配合面,两个配合面相互配合,用于实现行走机构沿输电线轴线上的运动;其中,行走单元包括行走本体,配合面位于行走本体的一侧,行走本体的另一侧设置有连杆,连杆的一端与行走本体铰接,连杆具有连接部,连接部用于与伸缩结构连接;当伸缩机构伸缩时,行走本体能够沿垂直于伸缩机构的轴线方向运动,通过结构设计,能够通过伸缩实现配合面与输电线的接触,从而保证行走机构的配合面与输电线的贴合,保证两者的配合强度,保证机器人的稳定性;且基于上述行走机构,能够保证除冰装置在输电线上行走的稳定性。
技术研发人员:龙安彪,陈燚,李倩怡,张万贺
受保护的技术使用者:六盘水师范学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!