一种用于双电机伺服系统的自适应变偏置力矩补偿方法
本发明属于电机伺服控制,特别是涉及一种用于双电机伺服系统的自适应变偏置力矩补偿方法。
背景技术:
1、随着现代科学技术的发展,军事和工农业等领域对大关联大功率伺服系统需求日益增加。受技术与价格等因素限制,单个电机驱动功率难以适用于这些场合。针对这一问题,可以采用多个小功率电机联合驱动大惯量负载的方式提高伺服系统的驱动能力。该驱动方式相比单电机系统,提高了伺服系统的驱动能力,还降低了设计成本和难度。然而多点击伺服随动系统引入了多个齿轮传动环节,在系统减速过程中不可避免的存在着齿隙。齿隙的存在将系统变为不完全可控系统,齿轮处于齿隙之间时,驱动电机与负载齿轮是不接触的。因此系统在启动和换向的过程中由于齿隙非线性的影响,存在回程误差和抖动现象。
2、对于多电机结构的伺服系统多采用添加偏置力矩的方式完成消隙过程。目前常见添加偏置力矩主要有两种方式,一种是添加常值恒定偏置力矩,对参与驱动伺服系统的两个电机分别施加大小相同方向相反的两个偏置力矩,但电机接近换向状态时,施加负偏置力矩的电机会提前转向与另一侧负载齿轮咬合,保证控制状态连续可控。另一种是施加变偏置力矩,仅在电机接近换向状态才施加大小相同方向相反的两个偏置力矩,减少施加恒定常偏置力矩带来的能量损耗。上述两种施加的偏置力矩都是一个定值,但伺服系统运行工况不是恒定不变的,在某些工况下该偏置力矩可能会因为过小达不到消隙效果,也可能由于过大对系统控制精度带来不利影响。本文的主要工作对施加的偏置力矩进行改进,将常值偏置力矩变为自适应变偏置力矩,偏置力矩根据系统状态变化而自适应变化,使偏置力矩在系统的各种运行工况下仍有较好的消隙效果。
技术实现思路
1、本发明目的在于提供一种用于双电机伺服系统的自适应变偏置力矩补偿方法,以解决当系统运行工况发生改变时,恒定偏置力矩的消隙效果变差或者过大的问题。
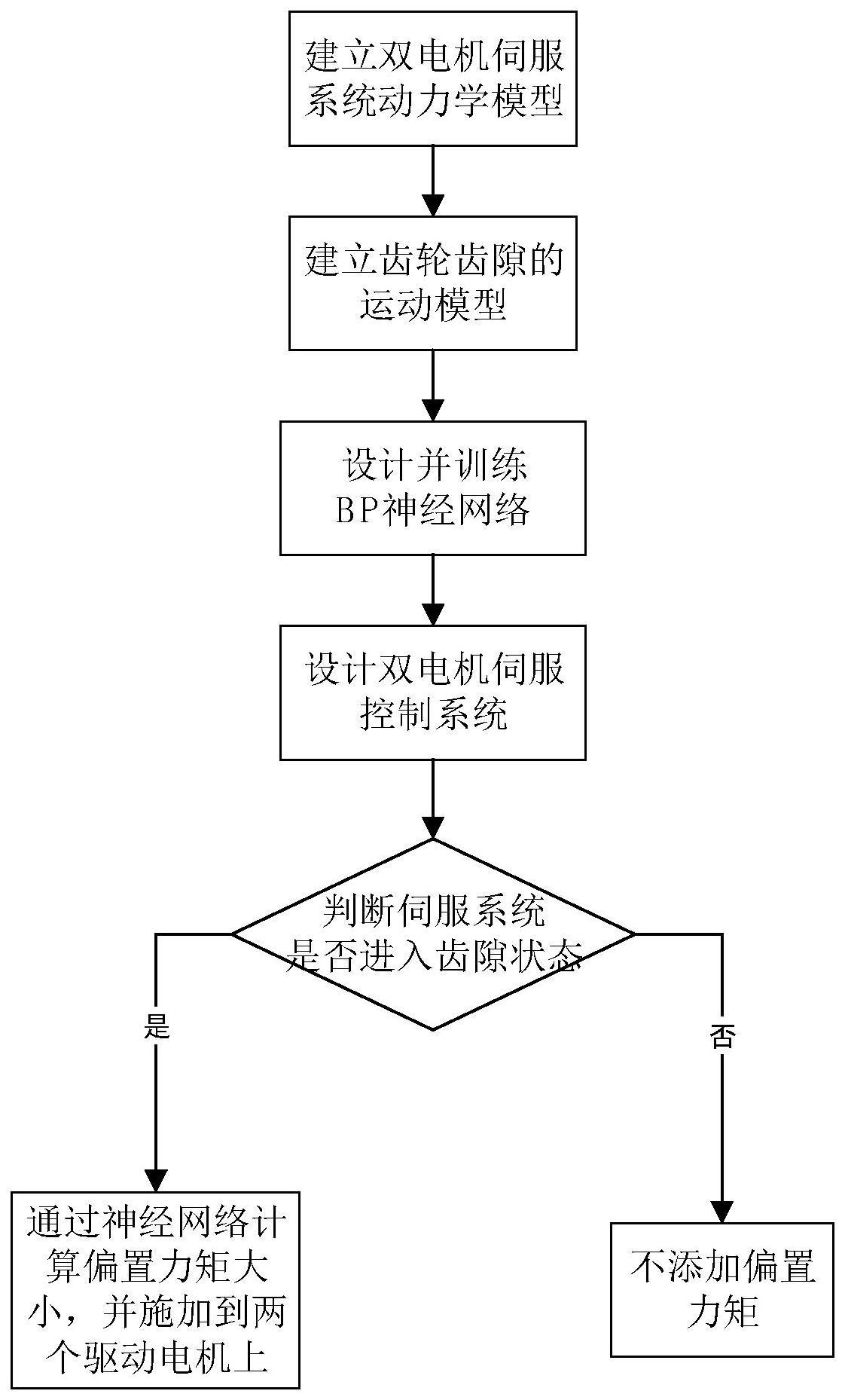
2、为了实现本发明目的,本发明一种用于双电机伺服系统的自适应变偏置力矩补偿方法,包括以下步骤:
3、步骤1、分析双电机伺服随动系统,采用死区模型描述齿隙环节,建立双电机伺服随动系统的动力学模型;
4、步骤2、分析电机发生齿隙环节运动状态,建立齿隙发生的运动模型;
5、步骤3、设计bp神经网络模型,以电机状态为输入,输出为偏置电流大小;
6、步骤4、根据建立的双电机伺服随动系统动力学模型设计控制系统,实现执行机构对位置信号的准确跟踪;
7、步骤5、根据建立的双电机伺服控制系统的控制输入判断双电机伺服随动系统是否进入齿隙状态,若进入了齿隙状态,则使用bp神经网络计算偏置电流,并对双电机施加一对大小相同方向相反的偏置电流。
8、进一步地,步骤1建立双电机伺服随动系统的动力学模型,模型用于设计双电机伺服控制系统,包括单电机数学模型、双电机系统的机械传动模型,具体步骤如下:
9、步骤1-1、首先建立单电机在同步旋转坐标系下的数学模型;
10、其中,定子电压模型为
11、
12、式中ud、uq分别是定子电压的d-q轴分量;id、iq分别是电子电流d-q轴分量;r是电子电阻;we是电角速度;ld、lq分别是d-q轴电感分量;ψf是永磁体磁链;
13、其中,电磁转矩方程为
14、
15、式中pn为极对数,te为电磁转矩;
16、步骤1-2、其次建立双电机伺服随动系统的传动模型;
17、其中,电机侧的机械运动方程为
18、
19、式中是等效到j号电机的转动惯量,是等效到j号电机的粘性摩擦系数,wj为j号电机转速,tcj为j号小齿轮力矩,rcj为j号电机减速比;tej为j号电机电磁转矩。
20、其中,齿隙的死区模型为
21、
22、式中k为刚性系数,αj为齿隙大小,zj为电机侧与负载侧的相对位移;
23、其中,负载侧的机械运动方程为
24、
25、式中jm是大齿轮的等效转动惯量,bm大齿轮的等效粘性摩擦系数,tl为负载力矩,rm是大齿轮与小齿轮的减速比,wm为系统大齿轮的转速。
26、进一步地,步骤2中分析电机发生齿隙环节运动状态,建立齿隙发生的运动模型,计算驱动电机齿轮与负载齿轮碰撞后期望速度,具体步骤为:
27、步骤2-1、当电机侧齿轮与负载侧齿轮碰撞时为弹性碰撞,碰撞过程满足角动量守恒和角动能守恒,则相应公式为
28、
29、式中j1,j2分别为反驱电机侧和负载侧转动惯量,w1,w2分别为碰撞前反驱电机侧和负载侧角速度,w′1,w′2分别为碰撞后反驱电机侧和负载侧角速度;
30、步骤2-2、将步骤2-1中的公式连立,得到碰撞后反驱电机侧与负载侧角速度为
31、
32、步骤2-3、根据步骤2-2中的公式可知,碰撞后反驱电机侧速度可由碰撞前电机侧和负载侧速度求出;其中碰撞前负载侧仍与另一个正驱电机齿轮接触,故碰撞前负载侧角速度等于正驱电机角速度/减速比;为减少碰撞后负载产生抖动,碰撞后速度方向不变,大小变为碰撞前的1/2。
33、进一步地,步骤3中使用经过训练的神经网络模型,以反驱电机侧齿轮碰撞前的期望速度和施加偏置力矩时的角速度为输入计算偏置力矩大小,其具体步骤为:
34、步骤3-1、首先设计一个采用bp算法的三层全连接的神经网络,bp神经网络结构包括输入层节点个数为4个,隐含层节点个数为5个,输出层节点个数为1个,各层节点仅与相邻层节点有连接,各层内节点之间无任何连接,各层节点之间实行全连接;
35、隐含层的输入输出公式为
36、
37、式中,为隐含层第1层的输出节点,为隐含层权值系数,为隐含层第1层激活函数输入,激活函数采用双曲正切函数:
38、
39、输出层的输入输出公式为
40、
41、式中,oout为输出节点,为输出层权值系数,netout为输出层的激活函数输入。
42、输出层节点对应施加的偏置电流其中输出层激活函数采用非负的sigmoid函数,即
43、
44、步骤3-2、其次设计隐含层的权值更新算法;通过定义性能指标函数,使用梯度下降法在负梯度方向上修正权值系数;
45、定义系统性能指标函数为
46、
47、根据梯度下降法,权值修正按照e(k)对权值系数的负梯度方向搜索调整,基本公式为
48、
49、式中,η为权值修正系数,0<η<1,为第m层上的权值修正值,oo,m为隐含层第m层上的输出节点,neto,m为隐含层第m层的激活函数输入,eo,m为第m层上的误差。
50、得到网络输出层和隐含层权值学习算法公式为
51、
52、步骤3-3、然后制作用于神经网络训练的训练集;
53、训练集为
54、
55、式中wi为j号电机当前角速度,为j号电机当前角加速度,为j号电机预定角速度;为施加的偏置电流;
56、反驱电机在跨过齿隙期间没有受到来自负载齿轮的负载力矩能够看作空载运行,因此训练集的制作可在电机空载运行下收集;在电机空载运行下,通过在不同角速度wi和角加速度下加入一个常电流小量ii,经过δθ位移后测量速度得到数据集其中δθ为系统齿隙大小;
57、步骤3-4、最后对神经网络进行训练;将制作好的训练集使用步骤3-2中的权值更新算法对神经网络进行训练。
58、进一步地,步骤4中设计双电机伺服控制系统,实现执行机构对位置信号的准确跟踪,具体包括以下步骤:
59、步骤4-1、首先基于三环pid控制设计双电机伺服随动系统位置控制系统,控制系统有内向外分为电流环、速度环、位置环实现对电机电流、转速、位置准确控制;
60、步骤4-2、首先设计电流环控制,在电流环控制中,采取id=0控制策略,其简化的定子电压模型为
61、
62、设计电流环控制输入为
63、
64、式中,pi为电流环比例系数,di电流环微分系数,ii为电流环积分系数;
65、步骤4-3、其次设计速度环控制,经过简化后的机械运动方程以及转矩方程为
66、
67、设计速度环输入为
68、
69、步骤4-4、然后设计位置环控制
70、
71、步骤4-5、最后将设计好的三环pid控制系统用于双电机伺服随动系统的位置控制;双电机伺服随动系统接受位置指令之后,经过速度环、位置环、电流环产生控制的电压指令使系统产生执行动作,反馈环节同时将电流、速度、位置状态量反馈至三个控制环节,对控制环节的输出量进行矫正,使得系统能准确跟踪位置指令。
72、进一步地,步骤5中对双电机伺服随动系统齿隙状态判断、计算并施加偏置电流,具体包括以下步骤:
73、步骤5-1、首先判断双电机伺服随动系统是否进入齿隙状态;
74、由于齿隙状态主要发生在电机加减速时,因此可基于驱动电机速度和负载速度相对大小来进行判断是否进入齿隙状态;根据步骤4-3中的公式可知,电机加速度与电磁转矩有关,电磁转矩同q轴电流成正比,通过检测电流环控制输入判断是否处于齿隙状态;若电流环控制输入在零点附近准备跨过零点,说明驱动电机将要加减速,双电机伺服随动系统的即将进入齿隙状态;若电流环控制输入不在零点附近,说明双电机伺服随动系统不处于齿隙状态,不需要对控制属于施加偏置电流;
75、步骤5-2然后根据bp神经网络计算出偏置电流的大小;
76、根据步骤3-3神经网络数据集可知,数据集中用作输入的,电机当前角速度wi和角加速度可直接测得;电机预定角速度为齿轮碰撞前的电机速度,由步骤2-2公式可知齿轮碰撞前角速度可由系统碰撞前后角速度求得,认为系统在碰撞前速度不变,以系统最小抖动为前提将系统碰撞后速度设定为碰撞前的90%;
77、bp神经网络接受系统当前状态输入计算出偏置电流,直接施加在两台电机的电流环输入端,其中反驱电机的偏置电流为负。
78、与现有技术相比,本发明的显著进步在于:1)偏置电流的实施大小可根据电机工况实时计算,实现了自适应调整;2)偏置电流的大小根据电机工况改变而改变,提高了伺服系统的跟踪性能;3)偏置电流实现了自适应的改变,进一步减小了系统因偏置电流带来的能量损耗。
79、为更清楚说明本发明的功能特性以及结构参数,下面结合附图及具体实施方式进一步说明。
- 还没有人留言评论。精彩留言会获得点赞!