一种同心笼次级直线双馈电机静态端部效应补偿方法
本发明属于直线双馈电机控制,更具体地,涉及同心笼次级直线双馈电机静态端部效应补偿方法。
背景技术:
1、城市轨道交通列车直线电机牵引系统无需机械传动装置,可直接产生沿运动方向的电磁推力,具有转弯半径小、爬坡能力强、隧道盾构面小、噪音低、维护成本低等优势,在国内外城市地铁、轻轨和磁悬浮中得到了广泛的应用。
2、直线双馈电机(linear doubly-fed machine,ldfm)驱动系统因其功率因数可调、运行方式灵活等优势逐渐引起国内外学者关注。根据两套馈电绕组所处位置不同,ldfm可分为双边励磁型和单边励磁型两种。双边励磁型ldfm初次级均嵌放绕组,可独立调整次级电流,国内外学者对其展开了广泛的研究。单边励磁型ldfm工作原理与无刷双馈感应电机类似,初级嵌有两套极对数不同的三相绕组,分别称为功率绕组和控制绕组。次级可分为笼型、磁阻型、绕线型等多种结构,其中笼型次级结构简单且轨道建设成本较低。
3、同心笼次级直线双馈电机(nest-loop secondary linear doubly-fed machine,nls-ldfm)存在较为严重的静态端部效应,会在初级两套绕组中同时产生负序电流和直接耦合电流。负序电流分量会使电机产生反向推力,从而削弱电机平均推力。直接耦合的能量传递发生在初级两套绕组之间,并不产生有效的推力和有功功率,因此会导致电机功率因数和效率下降,对电机运行产生不利影响。
4、因此亟需研究静态端部效应补偿策略,以抑制负序电流和直接耦合电流,从而提升nls-ldfm的推力、功率因数和效率等。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种同心笼次级直线双馈电机静态端部效应补偿方法,有效抑制因静态端部效应在初级绕组中产生的负序电流和直接耦合电流,提升电机性能。
2、为实现上述目的,本发明提供了一种同心笼次级直线双馈电机静态端部效应补偿方法,包括两套初级绕组的静态端部效应补偿步骤,两套初级绕组分别为控制绕组和功率绕组,每套初级绕组的静态端部效应补偿步骤均包括如下步骤:
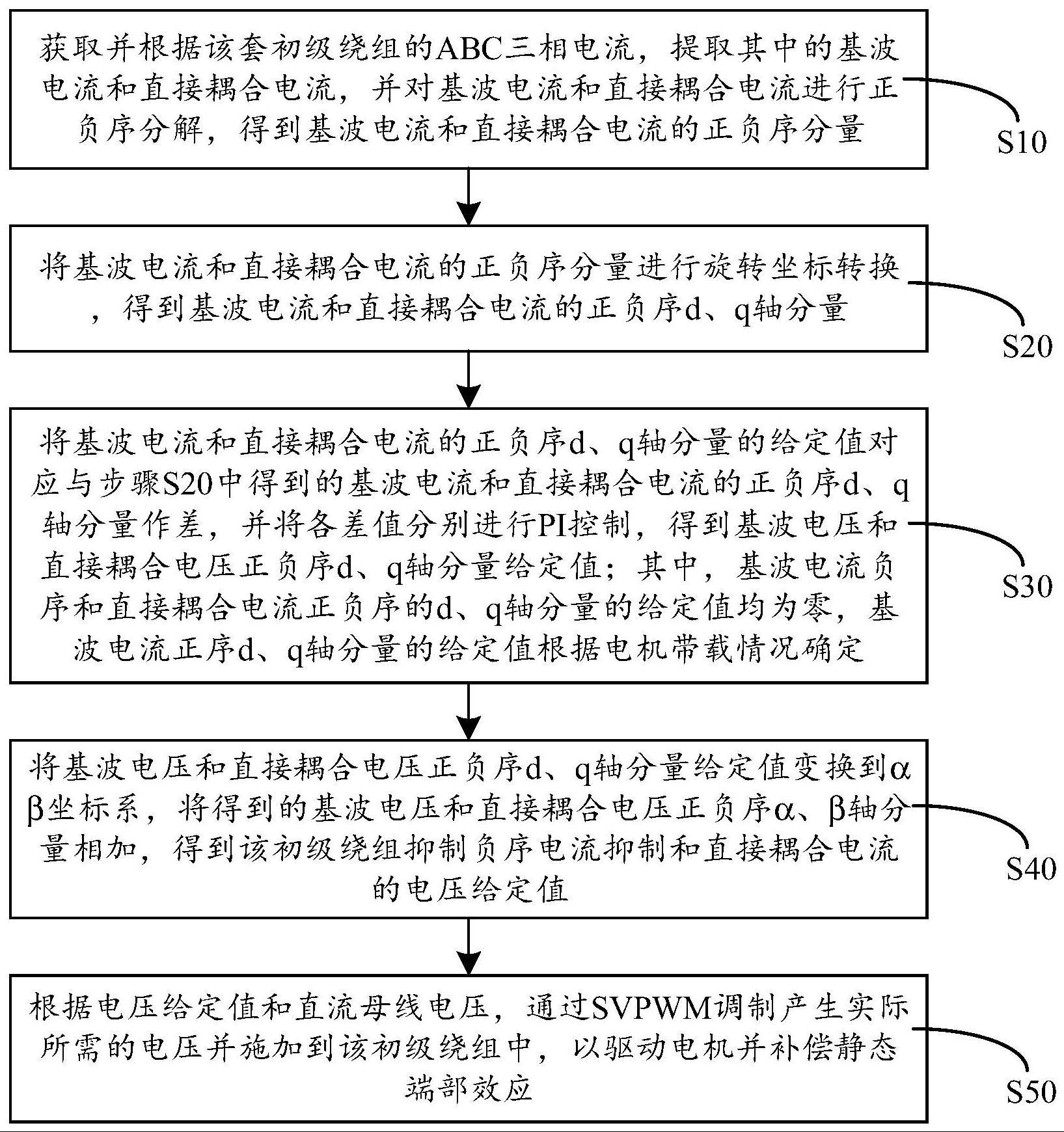
3、(1)获取并根据该套初级绕组的abc三相电流,提取其中的基波电流和直接耦合电流,并对所述基波电流和直接耦合电流进行正负序分解,得到所述基波电流和直接耦合电流的正负序分量;
4、(2)将所述基波电流和直接耦合电流的正负序分量进行旋转坐标转换,得到基波电流和直接耦合电流的正负序d、q轴分量;
5、(3)将所述基波电流和直接耦合电流的正负序d、q轴分量的给定值对应与步骤(2)中得到的基波电流和直接耦合电流的正负序d、q轴分量作差,并将各差值分别进行pi控制,得到基波电压和直接耦合电压的正负序d、q轴分量给定值;其中,基波电流负序和直接耦合电流正负序的d、q轴分量的给定值均为零,基波电流正序的d、q轴分量的给定值根据电机带载情况确定;
6、(4)将所述基波电压和直接耦合电压的正负序d、q轴分量给定值变换到αβ坐标系,将得到的基波电压和直接耦合电压的正负序α、β轴分量分别相加,得到该初级绕组抑制负序电流抑制和直接耦合电流的电压给定值;
7、(5)根据所述电压给定值和直流母线电压,通过svpwm调制产生实际所需的电压并施加到该初级绕组中,以驱动电机并补偿静态端部效应。
8、本发明提供的同心笼次级直线双馈电机静态端部效应补偿方法,无需准确的电机数学模型,仅需较少的电机参数,即可获取补偿静态端部效应的电压给定值,对于静态端部效应在功率绕组(控制绕组)中产生的负序电流和直接耦合电流进行提取和抑制,能有效提高电机推力等关键性能指标。
9、在其中一个实施例中,所述方法还包括如下步骤:
10、(6)基于短初级直线电机绕组理论,针对同心笼次级直线双馈电机静态端部效应产生机理,推导脉振反电动势的表达式,并将其合成作为电压参考矢量前馈补偿到两套初级绕组中,以抵消静态端部效应产生的基波负序电流和直接耦合电流。
11、在其中一个实施例中,步骤(6)具体为:
12、(a)获取所述功率绕组和控制绕组的c相电流,运用二阶线性跟踪微分器计算功率绕组和控制绕组的c相电流对于时间的导数;
13、(b)根据功率绕组和控制绕组的c相电流对于时间的导数计算功率绕组和控制绕组的脉振反电动势,其计算式为:
14、
15、
16、式中,ep2a、ep2b和ep2c表示功率绕组的三相脉振反电动势,ec2a、ec2b和ec2c表示控制绕组的三相脉振反电动势;pipc表示功率绕组的c相电流对于时间的导数,picc表示控制绕组的c相电流对于时间的导数;lpp和lcc分别为功率绕组和控制绕组的脉振自感;lpc为功率绕组和控制绕组之间的直接耦合互感;ipc和icc分别为功率绕组和控制绕组的c相电流;p为微分算子;
17、(c)根据三相脉振反电动势的相位关系,将功率绕组和控制绕组的三相脉振反电动势对应合成,作为功率绕组和控制绕组的脉振电压参考矢量up2m和uc2m,其计算式为:
18、up2m=-4(lpppipc+lpcpicc)
19、uc2m=-4(lccpicc+lpcpipc);
20、(d)将功率绕组和控制绕组的脉振电压参考矢量up2m和uc2m分别分解到αβ坐标轴上,得到功率绕组和控制绕组静态端部效应前馈电压补偿量的αβ轴分量,其计算公式为:
21、
22、
23、式中,u*p2α和u*p2β表示功率绕组静态端部效应前馈电压补偿量的αβ轴分量;u*c2α和u*c2β表示控制绕组静态端部效应前馈电压补偿量的αβ轴分量;
24、(e)将各初级绕组静态端部效应前馈电压补偿量的αβ轴分量和直流母线电压,通过svpwm调制产生所需的电压并施加到电机对应初级绕组端,以抵消静态端部效应产生的基波负序电流和直接耦合电流。
25、在其中一个实施例中,步骤(a)中,二阶线性跟踪微分器的传递函数g(s)为:
26、
27、式中,s表示拉式变换的符号;r为系统的阻尼系数。
28、在其中一个实施例中,步骤(c)中,三相脉振反电动势的相位关系为:
29、三相脉振反电动势的幅值相同,靠近初级两侧端部的ab相两相绕组的脉振反电动势相位相同,且与初级c相的绕组脉振反电动势的相位相反。
30、在其中一个实施例中,步骤(1)具体为:
31、(a)获取该套初级绕组的abc三相电流,经过clark变换将其从abc坐标系变换到αβ坐标系,得到αβ坐标系下的电流;
32、(b)将αβ坐标系下的电流经过谐波解耦,得到预提取的基波电流和直接耦合电流;
33、(c)对于功率绕组,将预提取的基波电流和直接耦合电流对应送入中心频率为fp1和fp2的双混合二阶-三阶广义积分器;对于控制绕组,将预提取的基波电流和直接耦合电流对应送入中心频率为fc1和fc2的双混合二阶-三阶广义积分器;其中,频率fp1、fp2、fc1和fc2的关系为:
34、
35、fp1=fc2
36、fc1=fp2
37、式中,fp1表示功率绕组中的基波电流频率,fp2表示功率绕组中的直接耦合电流频率;fc1表示控制绕组中的基波电流频率,fc2表示控制绕组中的直接耦合电流频率;vn表示次级的机械运行速度;pp和pc对应表示功率绕组和控制绕组的极对数;l表示初级铁芯的纵向长度;
38、(d)双混合二阶-三阶广义积分器输出得到该套初级绕组的基波电流和直接耦合电流及其滞后90度的正交电流信号,然后利用αβ坐标系下的正负序分量计算方法提取基波电流和直接耦合电流的正负序分量,得到该套初级绕组的基波电流和直接耦合电流的正负序分量。
39、在其中一个实施例中,所述双混合二阶-三阶广义积分器为两个mstogi并行的结构,mstogi的同相信号和正交信号的传递函数g1(s)和g2(s)分别为:
40、
41、
42、式中,s表示拉式变换的符号;k表示增益系数;ω0为中心频率;u(s)表示输入信号;u1(s)为经过滤波后的与u(s)相位相同的信号,u2(s)为相位滞后u1(s)90度的信号。
43、在其中一个实施例中,步骤(4)具体为:
44、对于功率绕组,利用功率绕组的基波电流和直接耦合电流正负序分量坐标变换角将功率绕组基波电压和直接耦合电压正负序d、q轴分量给定值变换到αβ坐标系;对于控制绕组,利用控制绕组的基波电流和直接耦合电流正负序分量坐标变换角将控制绕组基波电压和直接耦合电压正负序d、q轴分量给定值变换到αβ坐标系;
45、其中,各初级绕组的基波电流和直接耦合电流正序分量的变换角度θ+p1和θ+p2由该套绕组基波电流频率fp1和直接耦合电流频率fp2积分得到,其负序分量的变换角度θ-p1和θ-p2为该套绕组基波电流和直接耦合电流频率的相反数积分得到。
- 还没有人留言评论。精彩留言会获得点赞!