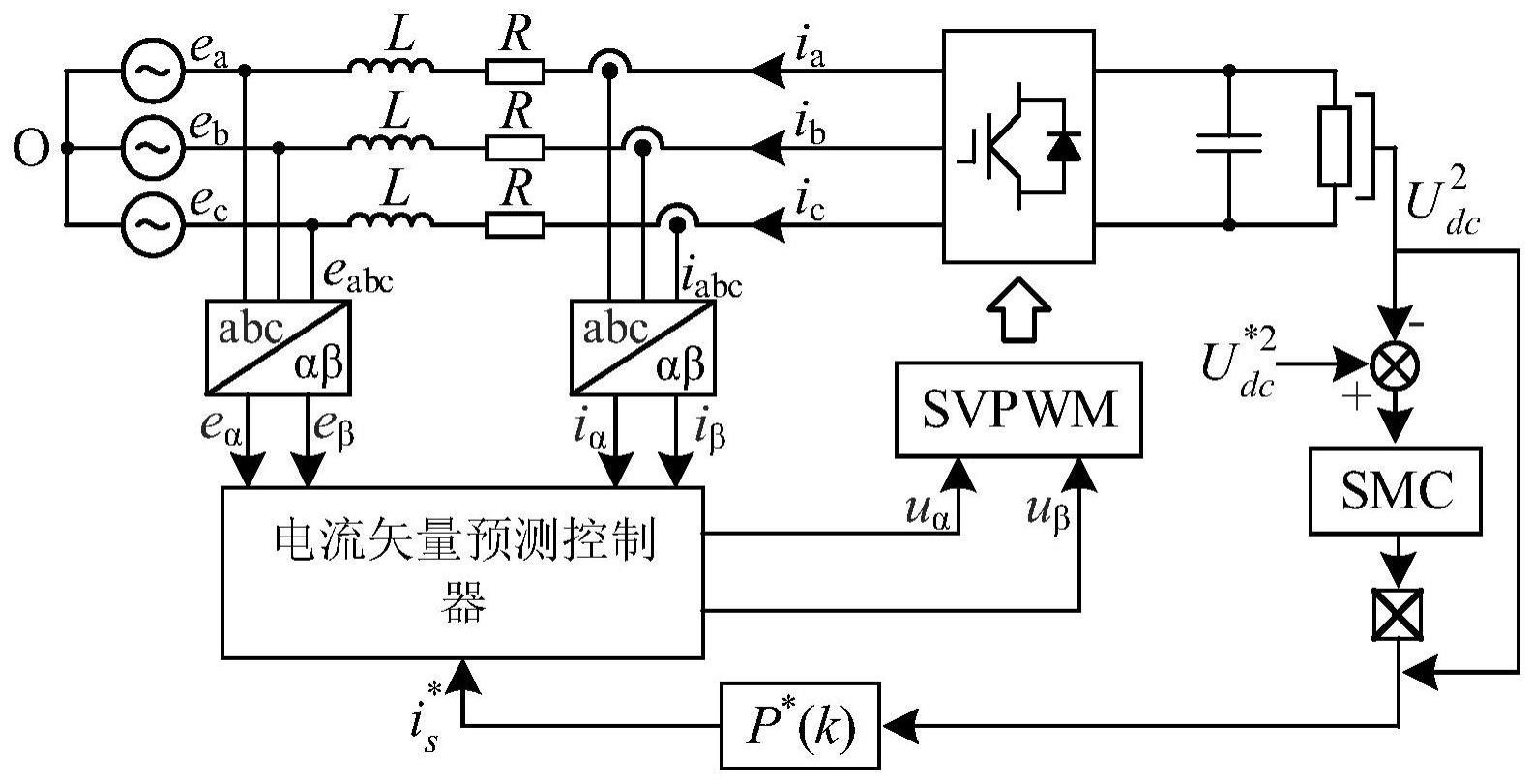
一种用于PWM整流器的双闭环离散矢量控制方法
本发明涉及pwm整流器矢量控制,尤其涉及一种用于pwm整流器的双闭环离散矢量控制方法。
背景技术:
1、三相pwm整流器广泛用于工业应用中,例如分布式能源、不间断电源(ups)、有源电力滤波器(apf)、再生电动机驱动器和微电网。与传统的二极管整流器相比,三相pwm整流器可以实现正弦交流电流,并由于具有功率因数高,直流电压可调和能量双向流动等特点,可以大大减少交流侧的谐波污染。
2、现有技术中,一些车载发电机或风力发电机产生的交流电纹波较大,无法直接提供给用电器使用,因此需要稳定高效可控的pwm整流器,使电压稳定输入到直流微网进行控制。三相pwm整流器典型控制策略通常采用矢量控制和直接功率控制。
3、申请号为cn201610430475.3的中国专利公开了一种基于分数阶pi的三相电压型pwm整流器的矢量控制方法,该控制方法采用双闭环矢量控制,其首先对三相电压型整流器施加基于整数阶pi的电流内环控制,再对三相电压型整流器施加基于分数阶pi的电压外环控制,其次采用svpwm生成方式形成一种基于分数阶pi的三相电压型pwm整流器的双闭环矢量控制方法模型,最后对上述的矢量控制模型进行参数整定。申请号为cn201720217635.6的中国专利公开了一种新型空间矢量控制的pwm整流器系统,该系统中电压外环为模糊滑膜变结构控制。然而,以上两种现有技术中的电流内环为pi控制,内环pi控制器需要对电流矢量进行clark和d-q变换后再进行d-q反变换进行矢量控制,因此实际应用时的计算延迟会影响控制速度。
4、申请号为cn201510864288.1的中国专利公开了一种基于新型模型预测控制的三相pwm整流的控制方法,该方法中的电流内环同样使用电流预测控制,外环则采用pi控制器,其母线电压响应速度较慢,同时电流矢量跟踪误差较大。此外,传统pi控制器电压外环预测第二个周期的电流矢量速度较慢,无法充分发挥电流内环预测控制的快速性。
技术实现思路
1、为解决上述现有技术中存在的部分或全部技术问题,本发明提供一种用于pwm整流器的双闭环离散矢量控制方法。
2、本发明的技术方案如下:
3、一种用于pwm整流器的双闭环离散矢量控制方法,所述方法包括:
4、s11:基于pwm整流器的数学模型,得到涵盖交直流侧电压电流关系的i2/u2模型;
5、s12:基于得到的i2/u2模型,借助等效变换,得到第k个周期的有功功率给定值,并得到电流内环的电流矢量给定值;
6、s13:基于得到的i2/u2模型,借助laplace反变换,得到第k+2个周期的电流矢量预测值;
7、s14:基于得到的电流内环的电流矢量给定值和电流矢量预测预测值,得到控制电压矢量,将控制电压矢量调制转换为逆变装置的pwm控制信号,并在k+1时刻供给逆变装置,跟随给定的电流矢量,以实施电流控制。
8、可选地,所述s11中,基于pwm整流器的数学模型,得到涵盖交直流侧电压电流关系的i2/u2模型,包括:所述pwm整流器的数学模型包括交流侧模型和直流侧模型,其中,
9、交流侧模型表示为:
10、
11、用矩阵表示为:
12、
13、在上式中,ua、ub和uc表示为交流侧a、b、c三相的相电压,uo表示为公共端电压,ia、ib和ic表示为交流侧a、b、c三相的相电流,l表示为三相输入电感,r表示为等效串联电阻,ea、eb、ec表示电网侧幅值相等的三相正弦交流电压,ua、ub、uc表示为a、b、c三相与公共端点之间的受控电压,其中,ea、eb、ec可以分别表示为:
14、
15、其中,em表示电压幅值,表示三相电压的初始相位,ω表示角频率,t表示时间,
16、通过空间矢量的clack变换,得到静止两相α-β坐标系下的交流侧的数学模型:
17、
18、其中,uα、uβ表示为α和β两相的相电压,iα、iβ表示为α和β两相的相电流。
19、直流侧模型表示为:
20、
21、其中,udc表示为直流母线电压,c表示为直流侧充电电容,rl表示为母线侧等效负载阻抗,sa、sb和sc为直流侧三个桥臂对应的开关系数,则三个桥臂对应的开关函数为:
22、
23、根据开关函数,得到直流母线电压与受控电压之间的关系为:
24、
25、由此,直流侧模型改写为:
26、
27、其中,
28、
29、将上式进行clack变换,并代入交流侧模型的方程中得到:
30、
31、令空间电流矢量幅值得到直流侧关于母线电压平方与网侧电流矢量平方的数学模型为:
32、
33、其中,γ为电流角,按照单位功率因数控制,电流电压相位重合,存在
34、可选地,所述s12:基于得到的i2/u2模型,借助等效变换,得到第k个周期的有功功率给定值,并得到电流内环的电流矢量给定值,包括:
35、先将转换为直流侧等效有功功率p*,得到下式:
36、
37、p*作为等效控制量,令取滑模面:
38、
39、结合指数趋近律减小误差信号到达滑模面的抖动,得到下式:
40、
41、其中,ε、k均为趋近律系数,由于实际系统采样均为离散周期,对式中的滑膜面进行离散化得到:
42、
43、其中,ts表示为离散周期,yd(k+1)表示为母线电压期望值平方,根据上式得到第k个周期的有功功率给定值:
44、
45、针对上式,采用以下的方法一或者方法二求解其中,
46、方法一包括:利用差分替代微分得到:其中,是前一周期的电流矢量给定值,在式中视为常数,直接求解二次方程,舍去不合理解,得到:
47、
48、方法二包括:采用四阶龙格-库塔法求解,为简化表达形式,取a=r,c=em,将第k个周期的有功功率给定值的公式变换得到:
49、
50、对于上述微分方程的四阶龙格-库塔法求解由如下方程给出:
51、
52、其中:
53、
54、可选地,所述s13:基于得到的i2/u2模型,借助laplace反变换,得到第k+2个周期的电流矢量预测值,包括:
55、将i2/u2模型的公式中交流侧的电流状态方程通过laplace反变换得到离散状态的状态方程:
56、is(t0+t)=f(t)is(t0)+g(t)us(t0)+h(t,t0)
57、其中,时间常数τ=l/r,γ=arctan(ωl/r),tr表示为旋转变换矩阵这一时间段的电流变化量可表示为:
58、
59、其中,δisi表示为电流零输入响应引起的变化矢量,δisu表示为电压输入响应变化,δise表示为转速即反电势矢量响应变化,将以上三项转化为幅值-相角的表述形式分别为:
60、
61、
62、
63、将上式中的时间变化量取t0=ts,利用泰勒级数展开并截断至二次项,离散后可得:
64、
65、
66、
67、根据k时刻的电流矢量is(k),利用求和可以计算出第k+1个周期的电流矢量预测值为:
68、
69、将上式求解出的k+1个周期的电流矢量预测值带入到下一周期的预测方程中,可得第k+2个周期的电流矢量预测值:
70、
71、可选地,所述s14中,基于得到的电流内环的电流矢量给定值和电流矢量预测预测值,得到控制电压矢量,将控制电压矢量调制转换为逆变装置的pwm控制信号,并在k+1时刻供给逆变装置,跟随给定的电流矢量,以实施电流控制,包括:
72、在得到第k+2个周期的电流矢量预测值的公式中,为根据之前的电压外环求解得出,隐藏在δisu(k+2k+1)中的us(k+1)为最终需要求得的控制电压矢量,该控制电压矢量us(k+1)在[k+1,k+2]区间内作用于pwm整流器,跟踪给定的电流矢量,整理可得:
73、
74、其中,
75、本发明技术方案的主要优点如下:
76、本发明中的方法,首先利用clark变换对pwm整流器数学模型进行推导,得出直流母线电压与交流网侧电流矢量存在平方关系,利用这一关系结合指数趋近律设计滑膜控制器,最后通过微分方程求解的方式得到给定电流矢量,替代了采用pi控制计算给定电流矢量,消除了因积分器带来的滞后,增强的系统的鲁棒性和动态性能,有效优化了内环电流矢量预测控制。该方法基于滑模控制的新型电压平方外环,结合电流内环矢量预测的双闭环控制,能够减小因功率变化带来的网侧电流冲击,改善网侧电压不平衡时产生的网侧电流畸变。
- 还没有人留言评论。精彩留言会获得点赞!