一种适用于同步磁阻电机的全速域无位置传感器控制方法
本发明涉及电力电子,特别是一种适用于同步磁阻电机的全速域无位置传感器控制方法。
背景技术:
1、同步磁阻电机凭借其调速范围广、生产成本低、转矩脉动小以及结构简单可靠等优势广泛应用于诸多领域。在同步磁阻电机高性能矢量控制中,电流环和速度环的闭环控制以及坐标变换都需要精确的转子位置信息,但引入位置传感器会降低系统可靠性,高温、振动、远距离等特殊场合也限制了传感器的使用。因此,实现同步磁阻电机无位置传感器控制尤为迫切。
2、在电机全速域范围内,单一的无位置传感器控制策略难以进行精确估算。因此通常将电机全转速分为零低速和中高速两个运行阶段,不同转速下使用不同算法。零低速阶段,使用传统高频电压注入法求取转子位置,通过代数运算分离电流响应中基波分量和高频分量,减少观测器相位滞后的同时提升系统动态性能。在中高速阶段,使用具有光滑连续特性的饱和函数设计滑模控制律,利用反电动势的反馈环节设计自适应观测器,并借助锁相环对转子相位延迟做出补偿,提升系统的鲁棒性和观测精度。
3、将电机在全转速范围利用不同算法分段估算,关键是保证两种无位置传感器策略在切换区间平滑过渡。传统加权复合控制,权重系数在切换区间线性增加或减少。由于两种无传感器算法估计误差不同,权重系数单纯线性变化不能消除系统估算误差的振荡,会造成转速阶跃性跳变。基于此问题设计新型复合观测器,核心思路为放弃使用角度信号转而对误差信号进行平滑。在过渡区间内对两种控制策略的位置误差信号融合,并根据运行速度调整误差权重以改变反馈回锁相环的误差量。
技术实现思路
1、本发明的目的在于提供一种适用于同步磁阻电机的全速域无位置传感器控制方法,用以解决传统观测器权重系数线性变化所造成的电机转速估算值振荡以及电机失步问题。
2、实现本发明目的的技术方案为:第一方面,本发明提供一种适用于同步磁阻电机的全速域无位置传感器控制方法,包括以下步骤:
3、步骤1,搭建高频激励下同步磁阻电机的数学模型;
4、步骤2,选取过渡区间高频信号注入策略,当电机转速处于零低速段时利用高频注入法获取转子信息,此时需向系统内注入幅值为直流母线电压十分之一的高频方波信号,所注入高频信号的范围不应超过转速上限切换点;
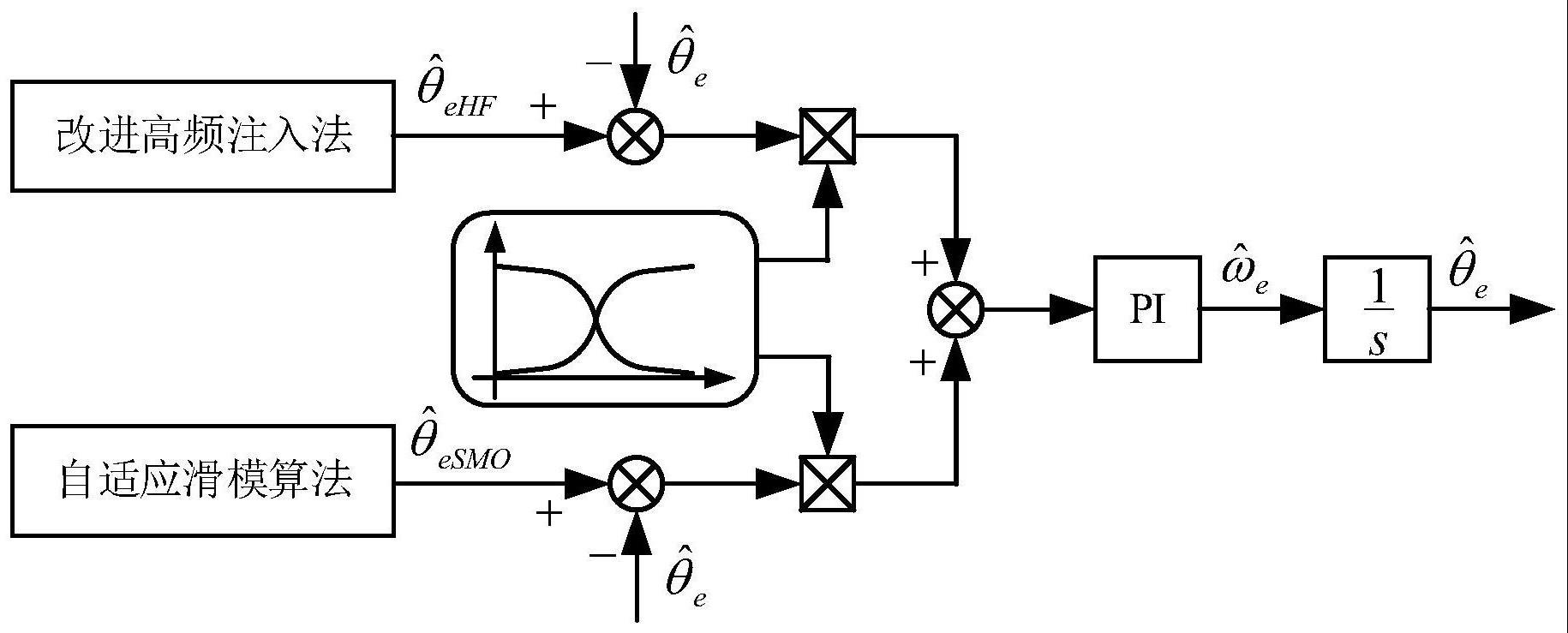
5、步骤3,基于融合锁相环的复合位置观测器设计;首先将高频注入法与滑模算法的锁相环合并,将二者的位置估计信息与复合观测器的最终位置做差之后反馈给锁相环,在过渡区间内对两种控制策略的位置误差加权融合,并根据电机运行速度调整误差权重以改变反馈回锁相环的误差量;
6、步骤4,计算过渡区间切换点;
7、步骤5,复合观测器权重函数选择;将高频注入法与滑模算法的锁相环合并之后,利用步骤4计算出的转速切换点来确定误差信号的加权系数;当转速小于下限切换点时,位置误差信号全部由高频注入法与复合观测器的差值提供;若转速高于上限切换点,误差量则全部来自滑模算法与复合观测器的差值;当转速处于过渡区间内,误差由高频注入法和滑模算法共同组成。
8、第二方面,本发明提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面所述的方法的步骤。
9、第三方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面所述的方法的步骤。
10、第四方面,本发明提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现第一方面所述的方法的步骤。
11、本发明与现有技术相比,其显著优点为:
12、本发明的电机零低速段与中高速段无位置传感器控制方案结合的过渡算法能够提升复合观测器的跟踪精度以及系统的抗负载扰动能力,同时降低大量使用滤波器造成的相位延迟和系统抖振。
技术特征:
1.一种适用于同步磁阻电机的全速域无位置传感器控制方法,其特征在于,包含以下步骤:
2.根据权利要求1所述的一种适用于同步磁阻电机的全速域无位置传感器控制方法,其特征在于,步骤1中高频激励下同步磁阻电机数学模型的具体推导过程为:
3.根据权利要求1所述的一种适用于同步磁阻电机的全速域无位置传感器控制方法,其特征在于,步骤2中过渡区间高频信号注入策略选取的具体过程为:
4.根据权利要求1所述的一种适用于同步磁阻电机的全速域无位置传感器控制方法,其特征在于,步骤3中基于融合锁相环的复合位置观测器设计的具体过程为:
5.根据权利要求1所述的一种适用于同步磁阻电机的全速域无位置传感器控制方法,其特征在于,步骤4中过渡区间切换点计算的具体过程为:
6.根据权利要求5所述的一种适用于同步磁阻电机的全速域无位置传感器控制方法,其特征在于,将复合观测器的位置误差上下限为0.08rad和0.12rad,代入式(12)得到转速切换点ω1=60r/min,ω2=100r/min。
7.根据权利要求1所述的一种适用于同步磁阻电机的全速域无位置传感器控制方法,其特征在于,步骤5中复合观测器权重函数选择的具体过程为:
8.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7中任一所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-7中任一所述的方法的步骤。
技术总结
本发明公开了一种适用于同步磁阻电机的全速域无位置传感器控制方法,针对角度信号非线性波动影响电机运行稳定性这一问题,转而采用对误差信号进行平滑的方式,解决了电机在全速域由于无传感器算法估计误差不同所引起的转速阶跃性跳变;利用锁相环在转速过渡区间对误差信号进行融合,并根据系统运行速度调整误差权重来改变反馈回锁相环的误差量。本发明以位置误差信号作为锁相环跟踪信号搭建复合观测器,该方法能够消除权重系数单纯线性变化所造成的电机转速估算值振荡,从而减少电机失步风险,提高运行稳定性。
技术研发人员:吕广强,王文超,王宝华
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!