一种基于自适应虚拟阻抗的有源滤波器控制系统设计方法与流程
本发明涉及滤波器领域,特别是涉及一种基于自适应虚拟阻抗的有源滤波器控制系统设计方法。
背景技术:
1、有源滤波器作为一种新型的电能质量治理装置,广泛应用于谐波治理、无功补偿等领域。在不同场景中,其控制策略可以进行相应改变。近年,高压直流输电系统作为能量枢纽广泛应用与各省市电网。其交流侧常并有无源滤波器及电容器组,用以无功补偿与电压支撑。在运行过程中,可能出现交流侧阻抗与无源滤波器及电容器组的阻抗匹配,导致并联谐振的发生。若此时存在该谐振频率下的谐波电流注入节点,会引发谐波电压放大,威胁供电质量。通常采用虚拟阻抗控制的有源滤波器进行节点电能质量的治理。
2、针对该控制策略,目前现有的谐振抑制方法仅适用于低压场景,在高压系统下不具有普适性,且现有方法中缺少控制器的设计描述。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种基于自适应虚拟阻抗的有源滤波器控制系统设计方法解决了现有谐振抑制方法仅适用于低压场景,在高压系统下不具有普适性,且现有方法中缺少控制器的设计描述的问题。
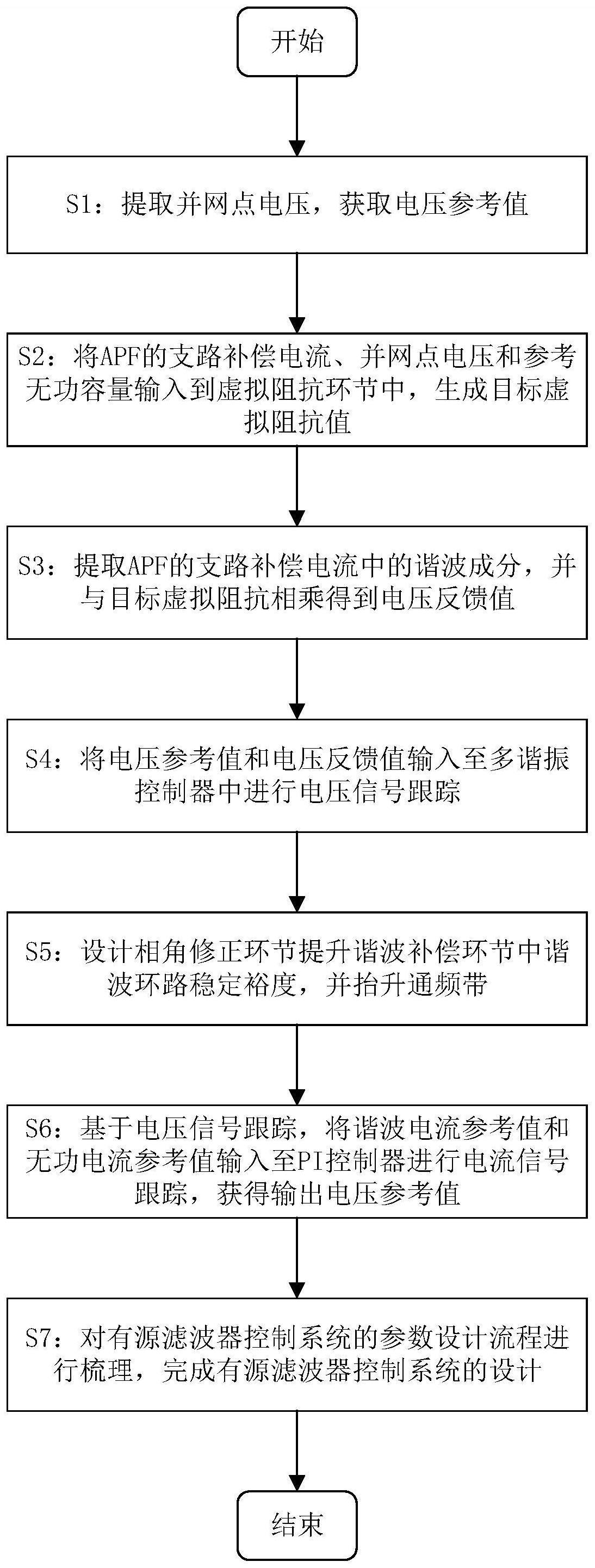
2、为了达到上述发明目的,本发明采用的技术方案为:一种基于自适应虚拟阻抗的有源滤波器控制系统设计方法,所述方法包括以下步骤:
3、s1:提取并网点电压,获取电压参考值
4、s2:将apf的支路补偿电流ic、并网点电压和参考无功容量输入到虚拟阻抗环节中,生成目标虚拟阻抗值rv;
5、s3:提取apf的支路补偿电流ic中的谐波成分ic,h,并与目标虚拟阻抗值rv相乘得到电压反馈值vpcc;
6、s4:将电压参考值和电压反馈值vpcc输入至多谐振控制器中进行电压信号跟踪;
7、s5:设计相角修正环节提升谐波补偿环节中谐波环路稳定裕度,并抬升通频带;
8、s6:基于电压信号跟踪,将谐波电流参考值和无功电流参考值输入至pi控制器进行电流信号跟踪,获得输出电压参考值uref;
9、s7:对有源滤波器控制系统的参数设计流程进行梳理,完成有源滤波器控制系统的设计。
10、上述方案的有益效果是:通过上述技术方案,设计出了一种高压apf来抑制hvdc系统侧并联谐振,同时给出了工程设计流程与方法,解决了现有谐振抑制方法仅适用于低压场景,在高压系统下不具有普适性的问题。
11、进一步地,s1中获取电压参考值和s3中提取谐波成分ic,h时,采用双广义二阶积分器完成提取,双广义二阶积分器的传递公式如下所示:
12、
13、
14、其中,gh(s)为控制第一路输出信号的控制器传输函数,kh为控制器带宽,ωh为h次角频率,ghq(s)为控制第二路输出信号的控制器传输函数,s为拉普拉斯算子,h为控制频次相关参数,且h取5、7、11和13。
15、上述进一步方案的有益效果是:利用上述双广义二阶积分器传输函数获取并网点电压中谐波成分和有源滤波器补偿电流中的谐波成分。
16、进一步地,s2中apf的输出表达式如下所示:
17、
18、其中,go为apf的输出,gv为多谐振控制器传输函数,gphase为超前相位补偿器传递函数,gi为电流环中pi控制器传递函数,gpwm为对控制系统延时等效后的传递函数,glr为连接电感l及变压器等效阻抗的整体传递函数,k为变压器变比,gsogi为双广义二阶积分器传递函数。
19、上述进一步方案的有益效果是:利用上式获得有源滤波器的输入输出,当gv增益足够,且vpcc和ic相位关系合适时,有源滤波器的输出就可以等效为阻值为rv的接地电阻。
20、进一步地,s2中apf的总容量公式如下所示:
21、sn=sh+sq+sp
22、其中,sn为apf总容量,sh为谐振抑制容量,sq为无功补偿容量,sp为剩余容量;
23、
24、其中,e为电压,和均为无功补偿电流;
25、
26、其中,i5α和i5β均为频次取5时的无功补偿电流,i7α和i7β均为频次取7时的无功补偿电流;i11α和i11β均为频次取11时的无功补偿电流,i13α和i13β均为频次取13时的无功补偿电流,α和β为一对正交坐标系。
27、上述进一步方案的有益效果是:传统的虚拟阻抗控制没有考虑系统并网点电能质量的波动,其谐振抑制容量是固定的,若系统的无功需求下降,则apf中会留有治理容量的剩余sp,本发明考虑到剩余容量,将sp分配给sh提升节点供电质量。
28、进一步地,s4中多谐振控制器函数公式如下所示:
29、
30、
31、其中,kpv为比例控制器参数,kr,n为不同频次的谐振增益,wc,n为不同频次的谐振带宽,为相位,wn为谐振频率,gc为电流环路补偿后的传递函数,j为虚数单位,kphase为相位补偿器增益,kpi为pi控制器的比例增益,ω1为gphase分子的转折频率,ω2为gphase分母的转折频率,r为连接阻抗的阻值。
32、上述进一步方案的有益效果是:利用上式去除控制频段中出现的负阻尼区,获得相位补偿量,提升相位,避免系统出现负阻尼区域导致系统不稳定。
33、进一步地,s5中相角修正环节在电压环路中采用超前相位补偿器,所述超前相位补偿器包括以下公式:
34、
35、其中,gii为电流环路补偿前的传递函数,gi_open为电流环开环传递函数。
36、上述进一步方案的有益效果是:考虑到谐波补偿环节中还需要对谐波频次信号进行跟踪。由于此时电流环截止频率较低,不能满足apf对谐波频次信号的控制要求,故在电压环路中采用超前相位补偿器,提升电压环带宽,同时还可以提升相位裕度,改善系统动态性能。
37、进一步地,s6中电流信号跟踪过程中电流环开环传递函数gi_open公式如下所示:
38、
39、其中,kii为pi控制器的积分增益,l为连接阻抗的电感值。
40、上述进一步方案的有益效果是:通过上述技术方案获得电流环开环函数公式,避免了传统方法导致内环增益过大、pwm容易过调制、容易影响谐波补偿效果的问题。
41、进一步地,s7中参数设计流程梳理包括以下分步骤:
42、s7-1:调整电流内环的pi控制器,使带宽满足无功补偿需求;
43、s7-2:串联超前相位补偿器,使谐振抑制环节的带宽满足要求;
44、s7-3:在未接入r控制器时调整比例控制器kpv,并设定频次k=5;
45、s7-4:接入各次谐波控制器rk,k取5、7、11和13,调整谐振增益值kr,并判断系统稳定性,如果稳定则计算电流环路补偿后的传递函数gc在k次频率处需要的相位修正值如果不稳定则返回s7-3中继续调整;
46、s7-5:根据相位修正值再次判断系统稳定性,如果稳定则计算频次k+2,如果不稳定则返回s7-3中继续调整;
47、s7-6:判断频次是否大于13,如果是则参数调整结束,如果否则返回s7-3中继续调整,直到频次大于13。
48、上述进一步方案的有益效果是:通过上述技术方案,提供了一套成熟的有源滤波器控制系统的参数设计方法,为后续装置的研制提供理论指导。
- 还没有人留言评论。精彩留言会获得点赞!