一种基于单相锁相环无相移同步旋转滤波器的PMSM无位置传感器控制方法
本发明属于永磁同步电机控制领域,涉及一种基于单相锁相环无相移同步旋转滤波器的pmsm无位置传感器控制方法,具体涉及一种在永磁同步电机中高速范围内实现无传感器控制的系统模型。
背景技术:
1、与直流电机相比,永磁同步电机(pmsm)具备高可靠性、低成本、易维护等优点,被广泛应用在高性能调速系统中,如电动汽车主驱电机、无人机、机器人、起重机等。在电机控制算法上,传统电机控制系统通常采用光电编码器或霍尔传感器来获取电机的转子位置和转速,使用传感器在增加成本的同时,还带来低可靠性、维护复杂等问题。因此,无传感器控制方式成为电机控制系统的重要研究方向。
2、要实现永磁同步电机的无位置传感器控制,常有滑模观测器和扩展卡尔曼滤波两种方法。滑模观测器主要观测动态模型中的反电动势信息来提取转子位置信息,在电机运行在中高速时,反电动势才较为明显,利于观测和提取,因此在低速下,常采用基于高频信号注入的方法。相对于其他无位置传感器算法,滑模观测器得益于对电机参数敏感度较低,鲁棒性强,容易实现,被广泛使用。
技术实现思路
1、本发明为解决滑模观测器反电动势观测出现的谐波脉动误差及相位延迟问题。本发明提供了一种单相锁相环无相移同步旋转滤波结构,根据传统同步旋转滤波结构存在的相位延迟问题,省去前级滤波器,将低通滤波器和dq变换结合,提出一种基于单相锁相环无相移同步旋转滤波结构,在滤除高次谐波的同时,使电机观测值具有无相移的优点。本发明具有鲁棒性强、精度更高、稳定性更好的优点。
2、为实现上述目的,本发明提供了一种基于单相锁相环无相移同步旋转滤波器的pmsm无位置传感器控制方法,其特征在于,包括如下步骤:
3、(1)建立滑模观测器算法,输入为静止坐标系的电压与电流信号,输出为电机转速与转子位置,此部分包括:
4、(a)在静止坐标系下,建立永磁同步电机模型,可表示为如下:
5、
6、其中rs为定子电阻,ls为定子电感,iα、iβ、uα、uβ分别为估计静止坐标系下的电流与电压分量,ωe与θ分别为电机转速与转子位置。
7、(b)可构造pmsm滑模电流观测器为:
8、
9、其中为定子电流的观测值;uα、uβ为观测器的控制输入;να、νβ为观测反电动势。
10、其中:
11、
12、(2)传统的滑模观测器先观测反电动势,再通过反电动势计算得到转子位置及速度。由于逆变器非线性和磁通空间谐波的影响,在反电动势估计中出现(6k±1)次谐波,进而估计转子位置和转速中出现谐波误差。传统滑模观测器中通常使用一阶低通滤波器滤除高次谐波,但若一阶低通滤波器的截止频率设置过高则滤波后的反电动势扰动信号仍然较多,若一阶低通滤波器的截止频率设置过低则存在相位延迟。因此需要设计一个合适的滤波器对谐波进行滤除。本发明提供了一种基于单相锁相环无相移同步旋转滤波器省去前级滤波,避免前级滤波器对观测值的影响,使用旋转坐标系下的单相锁相环取代传统正交锁相环,提高观测速度和观测精度。
13、(a)为剔除输出扩展反电动势中的高频分量,需要低通滤波器进行滤波,结合控制系统的动态性能,采用一阶低通滤波器,即:
14、
15、ωc为低通滤波器的截止频率。
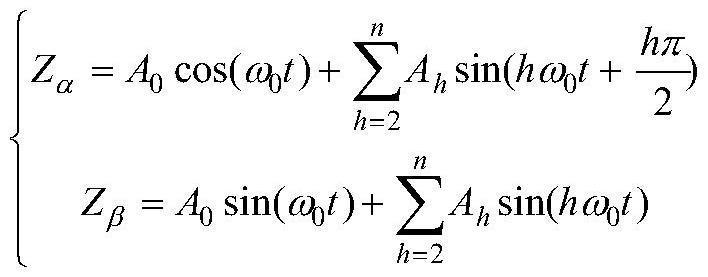
16、(b)省去滑模观测器中的低通滤波器,滑模观测器输出观测反电动势为:
17、
18、其中a0为基波幅值,ah为h次谐波幅值,ω0为基波频率,。
19、(c)将dq变换与低通滤波器结合,滤除反电动势中高次谐波。
20、(3)使用旋转坐标系下的单相锁相环取代传统正交锁相环对观测反电动势进行计算得到转子位置和角度,提高观测速度和观测精度。
技术特征:
1.一种基于单相锁相环无相移同步旋转滤波器的永磁同步电机无位置传感器控制无位置传感器的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于单相锁相环无相移同步旋转滤波器的永磁同步电机无位置传感器控制无位置传感器的控制方法,其特征是在于(2)中所述带有转子位置信息的信号的计算过程为:
3.根据权利要求1所述的一种基于单相锁相环无相移同步旋转滤波器的永磁同步电机无位置传感器控制无位置传感器的控制方法,其特征在于:传统的滑模观测器先观测反电动势,再通过反电动势计算得到转子位置及速度。由于逆变器非线性和磁通空间谐波的影响,在反电动势估计中出现(6k±1)次谐波,进而估计转子位置和转速中出现谐波误差。传统滑模观测器中通常使用一阶低通滤波器滤除高次谐波,但若一阶低通滤波器的截止频率设置过高则滤波后的反电动势扰动信号仍然较多,若一阶低通滤波器的截止频率设置过低则存在相位延迟。因此需要设计一个合适的滤波器对谐波进行滤除。
4.据权利要求1所述的一种基于单相锁相环无相移同步旋转滤波器的永磁同步电机无位置传感器控制无位置传感器的控制方法,其特征在于:本发明省去前级滤波器,将低通滤波器和dq变换结合。使用旋转坐标系下的单相锁相环取代传统正交锁相环,提高观测速度和观测精度。单相锁相环的基本思想是:利用一定途径构造与输入信号正交的参考信号,然后通过该信号计算得到转子位置和转速。旋转坐标系下的单相锁相环不依赖电机参数就可以进行转子位置和速度计算,且为自适应闭环系统,在谐波含量较大时仍能很好的观测电机。旋转坐标系下的单相锁相环的传递函数为:
5.据权利要求1所述的一种基于单相锁相环无相移同步旋转滤波器的永磁同步电机无位置传感器控制无位置传感器的控制方法,其特征在于:dq轴坐标系下的直流量低通滤波器滤除高次谐波,得到基波分量再通过反park变换反馈到smo。
技术总结
本发明提供了一种基于单相锁相环无相移同步旋转滤波器的永磁同步电机无位置传感器控制方法,本发明控制方法滑模观测器输出值省去前级滤波器得到的观测反电动势中其包含基波分量和谐波分量,因此在本发明中的滤波器中将低通滤波器和dq变换结合,滤除高次谐波的同时,使电机观测值具有无相移的优点。根据Park变换的原理,滑模输出量Z<subgt;α</subgt;、Z<subgt;β</subgt;频率分量和旋转轴系方向一致且速度相同,则得到在dq轴坐标系下的直流量低通滤波器滤除高次谐波再通过反Park变换反馈回滑模观测器。本发明在整个控制过程在滤除反电动势中谐波的同时不产生相位延迟,较大的提高了观测精度,在永磁同步电机的低速域无位置传感器中具有广泛的应用价值。
技术研发人员:兰志勇,戴珊琦
受保护的技术使用者:湘潭大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!