一种柔性驱动传感器及制备方法和人体运动能量收集装置
本发明涉及纳米发电机领域,具体涉及一种柔性驱动传感器及制备方法和人体运动能量收集装置。
背景技术:
1、传统的电池不能为小型便携式电子设备、个性化医疗和物联网(iot)设备提供耐用和可靠的电源。由于低功耗技术的进步,微电子器件的功耗已降至微、纳瓦级,这使得利用环境友好型能源成为一种良好而实用的策略。其中机械能具有能量密度高、分布广、获取简单等优点,因此将人体运动机械能转化为电能,成为一种新的研究方向。
2、摩擦纳米发电机(teng)具有选材广泛以及器件结构简单的优点,采用柔性材质制备摩擦纳米发电机,再将其与人体固定能实时捕获人体运动的能量,这种形式的能量转换不仅可以为电子系统提供可持续的能量,而且还可以为主动传感和人机接口提供可靠的解决方案。
3、现有的作用于人体能量捕捉的摩擦纳米发电机包括 “一种双螺旋结构的可拉伸teng”(参考文献:zhu, j.; wang, x.; xing, y.; li, j. nanoscale res. lett. 2019,14, 247.doi:10.1186/s11671-019-3085-9)它由镀银玻璃珠和硅胶作为可拉伸导电线(一种双螺旋结构的可拉伸teng ,sct)和硅胶涂层sct作为其它摩擦电螺纹组成。该器件能将人体关节运动所产生的生物力学能量进行转换。弹性体矩阵保证了该器件teng在可拉伸电子系统中的应用。该器件产生的开路电压为3.82v,短路电流为65.8na。
4、另外如zheng等人发明的“一种由可拉伸材料制成的封闭结构的teng”,由镀银玻璃珠和硅胶制成,用于收集人体运动能量和监测。它能产生高达150 v的开路电压和44.6mw/m2的最佳 瞬时功率密度。(参考文献:zhang, z.; du, k.; chen, x.; xue, c.;wang, k. nano energy 2018, 53,108–115.doi:10.1016/j.nanoen.2018.08.011);最近,qian等人提出了“一种采用接触分离工作方式的尼龙调电装置”,由镀银玻璃珠和硅胶制成,其开路电压和短路电流分别可达1.17kv和138 ma,(参考文献:qian, j.; he, j.;qian, s.; zhang, j.; niu, x.; fan, x.; wang, c.;hou, x.; mu, j.; geng, w.;chou, x. adv. funct. mater. 2020)。
5、在上述材料中“一种双螺旋结构的可拉伸teng”和“一种由可拉伸材料制成的封闭结构的teng” 其输出性能仍有待提高,“一种采用接触分离工作方式的尼龙调电装置” 虽然这在输出性能上有了很大的进步,但该器件采用双电极接触、分离的工作方式产生电信号在获取机械能量时很难将电流导线与运动物体连接起来。导致传输效果不佳。
6、此外,将相对硬的镀银玻璃珠嵌入到软硅胶基体中制备的有机和无机复合材料降低了teng器件的拉伸性能,不利于穿戴。因此,通过设计来提高teng的可拉伸性还需进一步研究。
技术实现思路
1、本发明为解决现有可穿戴摩擦纳米发电机结构复杂导致传输效果不佳以及可拉伸性较差的问题,提供了及一种柔性驱动传感器及制备方法和人体运动能量收集装置,制备了一种单电极的三明治结构的 柔性驱动传感器,并给出了制备以及使用方法,具有较好的传输性能以及可拉伸性便于数据采集以及穿戴。
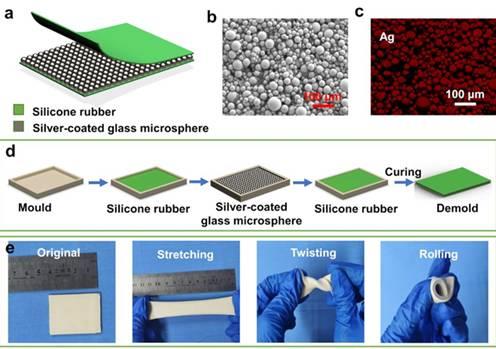
2、为了实现上述目的,本发明第一方面提出一种柔性驱动传感器,包括顶层、底层和中间层,所述顶层和底层均为硅胶材质制成的层结构,所述中间层由镀银玻璃珠均匀填充制成;
3、顶层、底层包夹中间层,顶层、底层和中间层固化后为一体化结构,中间层设置有电极出线,顶层、底层和中间层组合后形成单电极可拉伸摩擦纳米发电机结构;
4、所述中间层设置有外围电路,所述外围电路包括整流电路,所述整流电路与电极出线电性连接。
5、通过三层结构组成单电极可拉伸摩擦纳米发电机,在有轻微的运动使中间层的镀银玻璃珠摩擦时输出电信号,电信号可以用作记录运动的大小,同时可以利用产生的电能进行发电,相比较现有 可拉伸摩擦纳米发电机结构,可拉伸性能好,柔性配适,便于使用。
6、本发明第二方面提出一种柔性驱动传感器的制备方法,包括:
7、步骤1:使用3d打印机制造模具;
8、步骤2:在容器内倒入硅胶液,搅拌后倒入模具;
9、步骤3:硅胶液在50℃下固化30 min后,得到底层;
10、步骤4:将镀银玻璃珠均匀布设于底层表面形成中间层,中间层连接有通电导线;
11、步骤5:在中间层上铺设硅胶液形成顶层,所述镀银玻璃珠与顶层个底层所用硅胶液的质量比为1:1.5;
12、步骤6:顶层在50°c下固化30 min后与底层连接为一体,包夹中间层。
13、使用一种柔性驱动传感器的制备方法生成的柔性驱动传感器,柔性好,可以实现横向和纵向的弯曲、对折以及卷曲,同时拉伸效果较好。
14、另外,使用一种柔性驱动传感器的制备方法生成的柔性驱动传感器其形状和大小可以自由设置。 制作过程简便。
15、进一步地,步骤3所述底层的厚度为0.9~1.1mm;步骤4所述中间层的厚度为0.9~1.1mm;步骤5所述顶层的厚度为0.9~1.1mm。
16、基于第一部分和第二部分本发明的第三部分提出采用一种柔性驱动传感器的制备方法设计的一种人体能量检测装置。
17、进一步地,一种人体能量检测装置包括柔性驱动传感器和ad转换电路,所述ad转换电路与整流电路的输出端电性连接,所述ad转换电路包括ad芯片,所述整流电路包括全波整流电路。
18、将人体能量检测装置与身体活动部位固定,在运动时施力的大小直接影响柔性驱动传感器的中间层摩擦的效果,因此输出的电信号强度不同,通过整流电路进行整流,输出电信号再由ad转换电路将模拟信号转换为数字信号,在ad转换电路的外围设置接收器如mcu芯片,对数字信号进行记录,反映人体活动产生的施力大小。
19、基于第一部分和第二部分本发明的第四部分提出采用一种柔性驱动传感器的制备方法设计的一种运动能量收集装置。
20、进一步地,一种运动能量收集装置包括柔性驱动传感器、充电电路和锂电池,所述充电电路与整流电路的输出端电性连接,充电电路的另一端电性连接锂电池。
21、将人体能量检测装置与身体活动部位固定,当身体重复运动时,中间层持续摩擦产生电能,电能经整流电路处理有经充电电路调制为锂电池充电,锂电池另一端可以设置负载。通过柔性驱动传感器运动为锂电池充电,实现人体运动能量收集。
22、通过上述技术方案,本发明的有益效果为:
23、1.本发明提供了一种柔性驱动传感器,为单电极可拉伸摩擦纳米发电机结构,能够从自由物体的不规则机械运动中捕获能量,不依赖于电极的位置和形状,包括顶层、底层和中间层,采用“三明治”结构由硅胶和镀银玻璃珠制成,硅胶包夹排列均匀的镀银玻璃珠,在运动时镀银玻璃珠随之运动产生电信号,输出稳定,工作寿命长,且可以制成任意形状为不规则机械运动监测提供基础。
24、2.本发明提供了一种柔性驱动传感器的制备方法,只需简单的制造工艺,可制成多种形状,满足不同的工作要求。
25、3.本发明采用顶层、底层和中间层的结构设计结合硅胶的高弹性,使传感器易于拉伸,可拉伸至300%,可拉伸性能是现有传感器的2倍。实现可拉伸电子系统中的共形装配。
- 还没有人留言评论。精彩留言会获得点赞!