绝缘护套巡检方法、装置、巡检机器人和存储介质与流程
本发明涉及电力设备巡检,尤其涉及一种绝缘护套巡检方法、装置、巡检机器人和存储介质。
背景技术:
1、目前,架空线路为了保证线路安全,通常在输电线上安装绝缘护套,以对输电线路进行保护。
2、绝缘护套在安装后,需要定期对绝缘护套的安装情况进行检测,目前主要是通过人工肉眼观察或者通过无人机拍照后人工观看拍照的图像,以确定输电线上的绝缘护套是否出现作业不完整、脱落或者固定结构松动等情况,目前通过人工监测,费时费力。
技术实现思路
1、本发明提供了一种绝缘护套巡检方法、装置、巡检机器人和存储介质,以解决目前需要人工对绝缘护套进行巡检,费时费力的问题。
2、第一方面,本发明提供了一种绝缘护套巡检方法,应用于安装有摄像头、电磁测量装置以及定位模块的巡检机器人,包括:
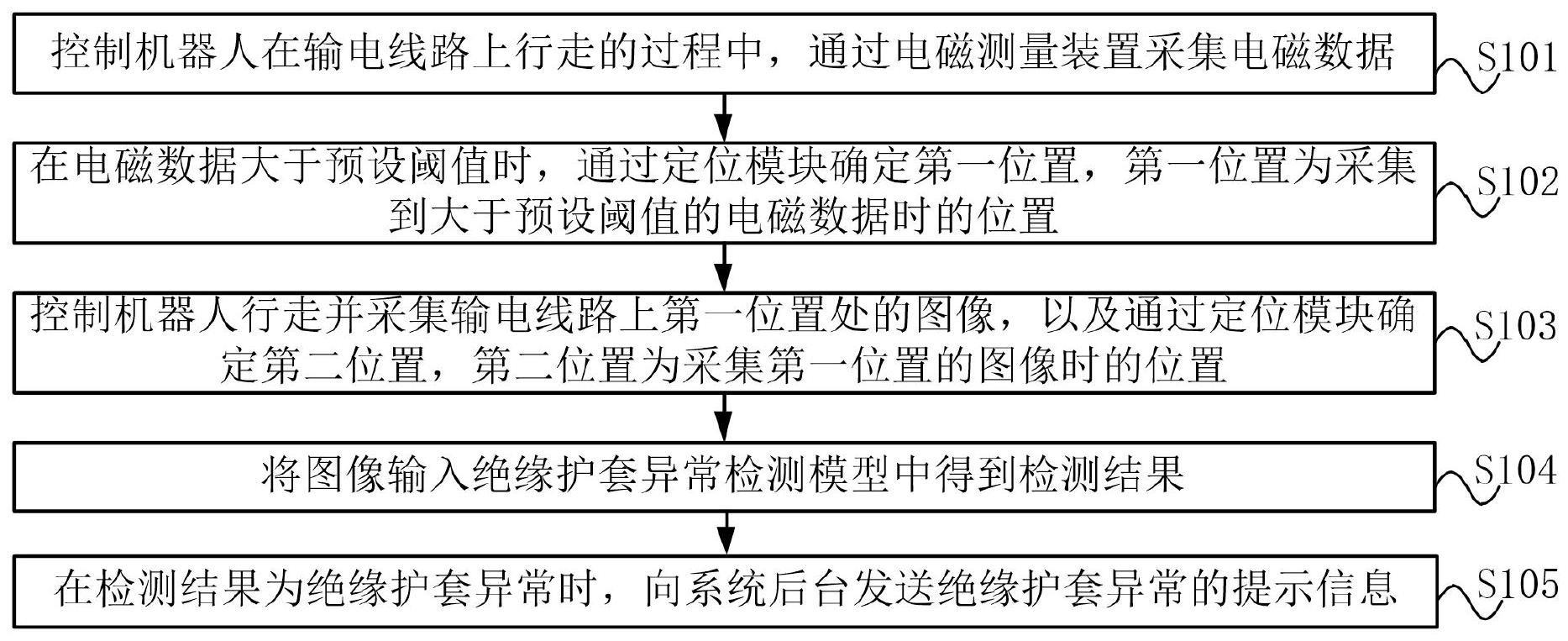
3、控制机器人在输电线路上行走的过程中,通过电磁测量装置采集电磁数据;
4、在所述电磁数据大于预设阈值时,通过所述定位模块确定第一位置,所述第一位置为采集到大于所述阈值的电磁数据时的位置;
5、控制所述机器人行走并采集所述输电线路上所述第一位置处的图像,以及通过所述定位模块确定第二位置,所述第二位置为采集所述第一位置的图像时的位置;
6、将所述图像输入绝缘护套异常检测模型中得到检测结果;
7、在所述检测结果为绝缘护套异常时,向系统后台发送绝缘护套异常的提示信息。
8、可选的,所述控制机器人在输电线路上行走的过程中,通过电磁测量装置采集电磁数据,包括:
9、控制机器人在输电线路上行走的过程中,通过电磁测量装置采集电场数据和磁场数据。
10、可选的,在所述电磁数据大于预设阈值时,通过所述定位模块确定第一位置,包括:
11、在所述电场数据大于预设的电场数据阈值,和/或,所述磁场数据大于预设的磁场数据阈值时,通过所述定位模块确定第一位置。
12、可选的,所述控制所述机器人行走并采集所述输电线路上所述第一位置处的图像,包括:
13、根据所述第一位置、所述摄像头的标定参数确定行走距离;
14、在所述机器人的位置与所述第一位置的距离至少等于所述行走距离时,控制所述摄像头采集图像。
15、可选的,所述绝缘护套异常检测模型包括绝缘护套安装异常检测子模型和绝缘护套固定异常检测子模型,所述将所述图像输入绝缘护套异常检测模型中得到检测结果,包括:
16、将所述图像输入绝缘护套安装异常检测子模型中,得到绝缘护套安装检测结果;
17、将所述图像输入绝缘护套固定异常检测子模型中,得到绝缘护套固定检测结果。
18、可选的,所述在所述检测结果为绝缘护套异常时,向系统后台发送绝缘护套异常的提示信息,包括:
19、在所述绝缘护套安装检测结果为绝缘护套安装异常,和/或,所述绝缘护套固定检测结果为绝缘护套固定异常时,采用所述图像和所述第二位置生成绝缘护套异常的提示信息。
20、可选的,还包括:
21、在所述电磁数据大于预设阈值时,采用所述电磁数据生成绝缘性能异常提示信息,并向系统后台发送所述绝缘性能异常提示信息。
22、第二方面,本发明提供了一种绝缘护套巡检装置,应用于安装有摄像头、电磁测量装置以及定位模块的巡检机器人,包括:
23、电磁数据采集模块,用于控制机器人在输电线路上行走的过程中,通过电磁测量装置采集电磁数据;
24、第一定位模块,用于在所述电磁数据大于预设阈值时,通过所述定位模块确定第一位置,所述第一位置为采集到大于所述阈值的电磁数据时的位置;
25、图像采集模块,用于控制所述机器人行走并采集所述输电线路上所述第一位置处的图像,以及通过所述定位模块确定第二位置,所述第二位置为采集所述第一位置的图像时的位置;
26、检测结果预测模块,用于将所述图像输入绝缘护套异常检测模型中得到检测结果;
27、提示信息发送模块,用于在所述检测结果为绝缘护套异常时,向系统后台发送绝缘护套异常的提示信息。
28、第三方面,本发明提供了一种巡检机器人,所述巡检机器人包括:
29、摄像头、定位模块、电磁测量装置以及至少一个处理器以及存储器,所述摄像头、定位模块、电磁测量装置以及存储器均与所述至少一个处理器连接,其中,
30、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行第一方面中任一项所述的绝缘护套巡检方法。
31、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明第一方面中任一所述的绝缘护套巡检方法。
32、本发明实施例的巡检机器人设置有摄像头、定位模块以及电磁测量装置,控制机器人在输电线路上行走的过程中通过电磁测量装置采集电磁数据;在电磁数据大于预设阈值时通过定位模块确定第一位置,第一位置为采集到大于预设阈值的电磁数据时的位置;控制机器人行走并采集输电线路上第一位置处的图像,以及通过定位模块确定第二位置,第二位置为采集第一位置处的图像时的位置;将图像输入绝缘护套异常检测模型中得到检测结果;在检测结果为绝缘护套异常时向系统后台发送绝缘护套异常的提示信息。本实施例通过电磁数据大于预设阈值时触发采集图像,并将图像输入绝缘护套异常检测模型中获得检测结果,在检测结果为绝缘护套异常时向系统后台发送提示信息,无需人工对绝缘护套巡检,节省了人力物力,并且先通过电磁数据确定是否触发采集图像,降低了图像的采集量和模型的算力资源。
33、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种绝缘护套巡检方法,其特征在于,应用于安装有摄像头、电磁测量装置以及定位模块的巡检机器人,包括:
2.如权利要求1所述的绝缘护套巡检方法,其特征在于,所述控制机器人在输电线路上行走的过程中,通过电磁测量装置采集电磁数据,包括:
3.如权利要求2所述的绝缘护套巡检方法,其特征在于,在所述电磁数据大于预设阈值时,通过所述定位模块确定第一位置,包括:
4.如权利要求2所述的绝缘护套巡检方法,其特征在于,所述控制所述机器人行走并采集所述输电线路上所述第一位置处的图像,包括:
5.如权利要求1-4任一项所述的绝缘护套巡检方法,其特征在于,所述绝缘护套异常检测模型包括绝缘护套安装异常检测子模型和绝缘护套固定异常检测子模型,所述将所述图像输入绝缘护套异常检测模型中得到检测结果,包括:
6.如权利要求5所述的绝缘护套巡检方法,其特征在于,所述在所述检测结果为绝缘护套异常时,向系统后台发送绝缘护套异常的提示信息,包括:
7.如权利要求1-4任一项所述的绝缘护套巡检方法,其特征在于,还包括:
8.一种绝缘护套巡检装置,其特征在于,应用于安装有摄像头、电磁测量装置以及定位模块的巡检机器人,包括:
9.一种巡检机器人,其特征在于,所述巡检机器人包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的绝缘护套巡检方法。
技术总结
本发明公开了一种绝缘护套巡检方法、装置、巡检机器人和存储介质,包括:控制机器人在输电线路上行走的过程中通过电磁测量装置采集电磁数据;在电磁数据大于预设阈值时通过定位模块确定第一位置,控制机器人行走并采集输电线路上第一位置处的图像,以及通过定位模块确定第二位置,将图像输入绝缘护套异常检测模型中得到检测结果;在检测结果为绝缘护套异常时,向系统后台发送绝缘护套异常的提示信息。本实施例通过电磁数据大于预设阈值时触发采集图像,并将图像输入绝缘护套异常检测模型中获得检测结果,在检测结果为绝缘护套异常时向系统后台发送提示信息,无需人工对绝缘护套巡检,节省了人力物力。
技术研发人员:李雪玲,潘正焘,温振宇,张勇,霍俊豪,陈朝新,钟建业,江超,朱城香,麦嘉颖,韦颖康,梁升锋,范伟波,赖敏琪,罗灼见,张博,陈佳鹏
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!