一种变电站多功能巡检机器人的制作方法
本发明涉及巡检机器人,具体为一种变电站多功能巡检机器人。
背景技术:
1、随着智能电网系统的发展,变电站和电力线的覆盖范围越来越广,其中电力设备的安全运行至关重要。
2、对电力设备的有效巡检是保证变电站良好运行以及对广大用户供电的重要保证,在给人们带来便利的同时,也给电力设备的检修维护带来了新的问题。
3、在日常的维护中,常使用人工巡检,而传统的人工巡检的方式具有人力资源消耗大、覆盖面小、工作效率低的缺点。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种变电站多功能巡检机器人。
2、为实现上述目的,本发明提供如下技术方案:
3、一种变电站多功能巡检机器人,包括:
4、底盘;
5、用于驱动底盘,使其在变电站进行行走的调速式行走机构,其设置有两组,且两组所述调速式行走机构分别安装在底盘相对的两侧;以及
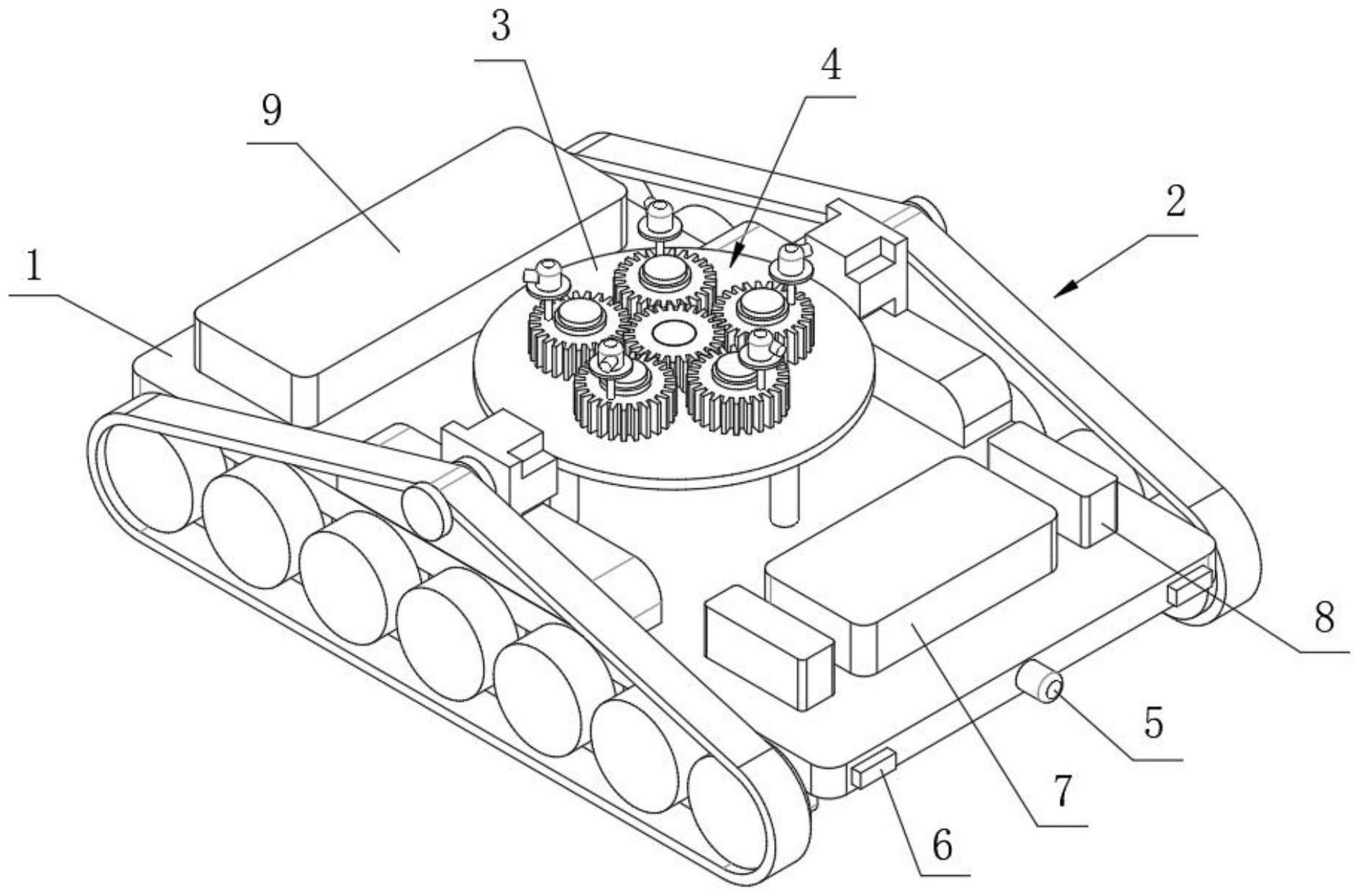
6、对变电站的各电箱进行检查的行星式旋转摄像机构,其设置在所述底盘的上方。
7、作为优选的技术方案,两组所述调速式行走机构均包括伺服电机,两个所述伺服电机对称的设置在底盘相对的两侧,两个所述伺服电机的下方均设置有行走结构,所述行走结构和伺服电机之间安装有行走件。
8、作为优选的技术方案,所述行走结构包括两组轴座,每组轴座均设置有多个,两组所述轴座分别固定安装在底盘的底部相对的两侧上,每个所述轴座上均转动安装有轴杆;
9、每个所述轴杆的外侧端面上均固定安装有行走轮;
10、所述轴杆的内侧一端固定安装有下限位卡环;
11、其中,所述下限位卡环的内侧端面与轴座的内侧端面转动连接;
12、所述伺服电机的输出轴上固定安装有皮带轮;
13、所述行走件为履带;
14、所述履带套接安装在皮带轮和多个行走轮之间;
15、其中,所述皮带轮与多个行走轮处于同一垂直面上。
16、作为优选的技术方案,两个所述伺服电机的下方均设置有固定座,两个所述固定座的底部均与底盘的顶部固定连接,两个所述固定座的顶部分别与两个伺服电机固定连接。
17、作为优选的技术方案,所述底盘的顶部安装有下支架,所述下支架的底部边缘圆周式的固定安装有多个支杆,每个所述支杆的底部均与底盘的顶部固定连接;
18、所述行星式旋转摄像机构安装在下支架上。
19、作为优选的技术方案,所述行星式旋转摄像机构包括电机,所述电机固定安装在下支架的底部圆心处,且所述电机的输出轴向上贯穿于下支架;
20、所述电机的输出轴端部固定安装有太阳齿轮,所述太阳齿轮与下支架的顶部转动连接;
21、所述下支架的顶部圆周式的分布有多个行星齿轮,每个所述行星齿轮均与太阳齿轮相啮合;
22、每个所述行星齿轮的顶部端面上固定安装有上支架,每个所述上支架上均固定安装有全景摄像头。
23、作为优选的技术方案,每个所述行星齿轮上均转动安装有转轴,每个所述转轴的底部端面均与下支架的顶部固定连接;
24、每个所述转轴的顶部一端均固定安装有上限位卡环,所述上限位卡环的内侧端面与行星齿轮的顶部端面转动连接。
25、作为优选的技术方案,所述底盘在位于两组调速式行走机构之间的侧壁中部固定安装有视觉传感器,所述视觉传感器的两侧固定均固定安装有测距传感器。
26、作为优选的技术方案,所述底盘的顶部在位于视觉传感器的一侧中部固定安装有控制器,所述控制器的两侧均固定安装有伺服驱动器,所述底盘的顶部在远离控制器的一侧固定安装有蓄电池组;
27、其中,所述伺服电机受控于伺服驱动器,所述伺服驱动器受控于控制器;
28、其中,所述电机受控于控制器,所述全景摄像头受控于控制器;
29、其中,所述视觉传感器受控于控制器,所述测距传感器受控于控制器;
30、其中,所述蓄电池组分别通过导线与伺服电机、电机、全景摄像头、视觉传感器、测距传感器、控制器以及伺服驱动器电性连接;
31、其中,所述伺服电机为直流型伺服电机,所述电机为直流无刷电机,所述全景摄像头的电源接口为dc直流电源,所述视觉传感器为直流电源,所述测距传感器为直流电源,所述控制器的电源接口为dc直流电源,所述伺服驱动器的电源接口为dc直流电源。
32、作为优选的技术方案,所述控制器内具有无线传输模块以及通讯模块;
33、所述控制器能够通过无线传输模块以及通讯模块与云端控制中心通讯连接;
34、所述全景摄像头能够通过控制器的无线传输模块以及通讯模块将变电站各电箱的视频实时传输至云端控制中心;
35、所述云端控制中心能够通过控制器内的无线传输模块以及通讯模块反向控制控制器,使控制器分别控制两个伺服驱动器,进而使两个伺服驱动器分别控制两个伺服电机的转速;
36、所述云端控制中心能够通过控制器控制电机的转速;
37、所述视觉传感器能够将电信号通过控制器反馈至云端控制中心。
38、与现有技术相比,本发明的有益效果是:
39、一、本发明中,底盘能够通过两组调速式行走机构在变电站进行行走,同时,在底盘又能够驱动行星式旋转摄像机构进行移动,从而使该巡检机器人能够在变电站对各电箱进行巡检,在行星式旋转摄像机构自身的运动下,能够进行全角度的视频拍摄,该巡检机器人能够代替传统的人工巡检,减少人力资源浪费,提高了变电站巡检的巡检覆盖面,也提高了巡检的效率。
40、二、本发明中,伺服电机能够通过其输出轴驱动履带,履带又能够同步驱动多个行走轮的转动,进而优化了两组调速式行走机构的行走方式。
41、三、本发明中,电机能够通过其输出轴驱动太阳齿轮的转动,太阳齿轮的转动能够同时驱动多个行星齿轮的转动,从而使多个行星齿轮能够围绕太阳齿轮做自转运动,当每个行星齿轮在做自转运动时,则能够通过上支架驱动全景摄像头的转动,因此,每个全景摄像头能够通过每个行星齿轮的自转运动,做各自的圆周旋转,在每个全景摄像头做圆周旋转时,能够进行全角度的视频拍摄,将变电站各处的电箱情况进行拍摄。
42、四、本发明中,视觉传感器能够将路况进行感知,同时,在两个测距传感器的作用下,能够与视觉传感器相配合,对路况进行实时测距,即测量该巡查机器人与前方障碍物之间的距离,并结合视觉传感器,实时的进行路线调整,从而实现自主行走。
43、五、本发明中,在视觉传感器和测距传感器的作用下,能够以电信号的方式向控制器内传输,控制器进行处理后,能够将指令分别传输至两个伺服驱动器,再通过两个伺服驱动器分别对两个伺服电机的转速进行控制,当两个伺服电机的转速不同时,则该巡查机器人能够实现转向,同时,在视觉传感器和两个测距传感器的作用下,该巡查机器人的行走路线能够自主调整。
44、六、本发明中,每个全景摄像头均能够将视频画面以电信号的形式传输至控制器,再由控制器做进一步的处理;
45、控制器能够反向控制两个伺服电机以及电机的转速,同时,还能够反向控制每个全景摄像头、视觉传感器、两个测距传感器以及两个伺服驱动器。
46、七、本发明中,云端控制中心拥有监控人员,当每个全景摄像头将视频画面以电信号的形式传输至控制器后,控制器能够通过其内部的无线传输模块以及通讯模块,将该电信号实时传输至云端控制中心内,云端控制中心的监控人员则能够通过传输过来的画面,观察变电站各处的电箱的安全情况。
47、八、本发明中,监控人员还能够通过控制器,反向控制两个伺服电机的转速,从而实现对该巡查机器人行走路线的控制,还能够反向控制电机的转速,从而使每个行星齿轮自转的速度进行变化,当每个行星齿轮的自转速度发生变化后,每个全景摄像头的转速就会同步的发生变化,为了更好的观察变电站每一处电箱的情况,可以将电机的转速调慢;
48、视觉传感器和两个测距传感器还能够将实时路况以电信号的形式,传输至云端控制中心内的数据库中,从而完善大数据。
- 还没有人留言评论。精彩留言会获得点赞!