一种基于直流注入的内嵌式永磁同步电机最大效率转矩比控制方法
本发明涉及一种内嵌式永磁同步电机优化控制方法,属于电气工程、电机建模、电机控制领域。
背景技术:
1、内嵌式永磁同步电机由于具有高转矩密度,宽调速范围、快动态响应、高恒功率比等优势,被广泛应用于轨道交通、航空航天、家用电机及风力发电等诸多领域。在应用过程中,永磁同步电机的电气参数可能会因温度等运行环境改变或电流变化和速度变化等运行条件的影响而发生改变,这将导致电机难以实现在特定转矩下的最大效率工作点运行。因此,为了实现永磁同步电机的高性能运行和节能增效,需要实现准确的在线最优效率控制。
2、现有的最优效率控制方法可分为基于模型的计算和在线查找两种。基于模型的方法是通过预先实验标定好的模型参数计算最大效率工作点,具有响应速度快的优点。但是,基于模型的方法在计算时需要依靠数值方法进行运算,这会增加极大增加计算负担。并且,当出现一些非预期的电机特性偏移情况,例如永磁体不可逆退磁,基于模型的方法将无法进行调整。而与之对应的,在线查找法基于实测电机信号逐步调整电流以寻找最大功率点,因而即使在一些非预期特性偏移的情况下也能查找到最大效率点。此外,在线查找法无需求解复杂的模型公式,因而运算负担小、便于应用。
3、但是,若要利用在线查找的方式实现最大效率转矩比控制,重要的一个环节是准确观测出电机在运行过程中转矩的变化,不仅需要克服电机固有方程的欠秩特点,还同时要考虑电机的磁饱和现象和铁损的影响。
技术实现思路
1、为实现内嵌式永磁同步电机在特定转矩下以最优效率运行,本发明提出了一种基于直流注入的内嵌式永磁同步电机最大效率转矩比(maximum efficiency per torque,mept)控制方法,改善由于电机参数变化和模型计算误差带来的最大效率工作点准确性较差的问题,进而使永磁同步电机的运行更加高效,可以避免在线查找的精度丢失和速度下降。
2、为解决上述问题,本发明采用的技术方案是:
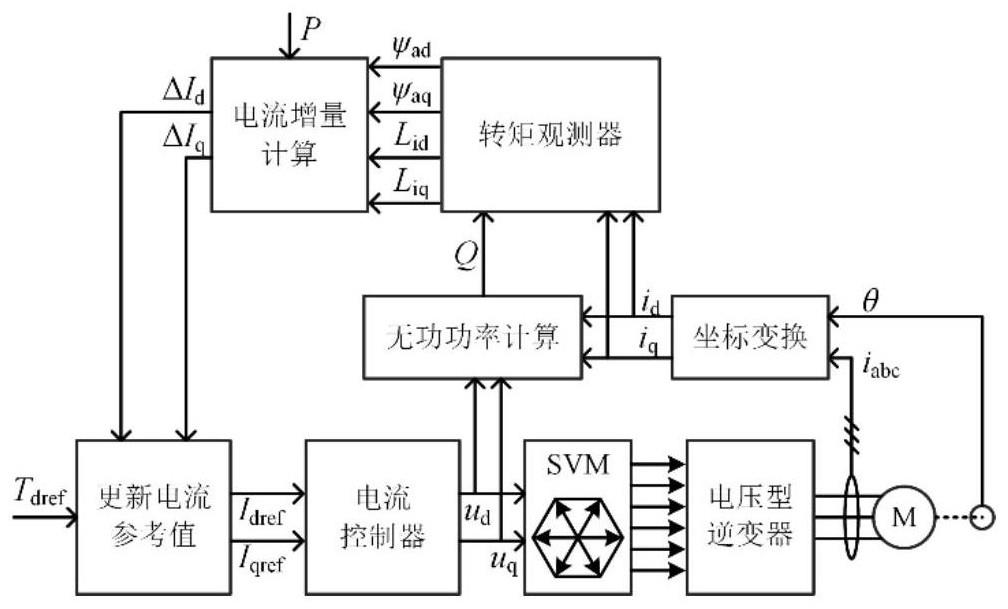
3、一种基于直流注入的内嵌式永磁同步电机最大效率转矩比控制方法,其包括:提出一种基于直流信号注入和直流无功功率的转矩观测器;基于所述转矩观测器提出一种具有在线查找功能的最大效率转矩比控制方法;
4、首先,设计直流信号注入下的稳态电流时序,具体步骤为:
5、(1)在第0组电流工作点[id0,iq0]前,通过直流信号注入构建4组电流,序号分别为第1组、第2组、第3组、第4组;id0和iq0分别为d轴电机电流基值和q轴电机电流基值;
6、(2)各电流组的输出先后顺序为:第4组、第3组、第2组、第1组、第0组;
7、(3)定义第1组电流工作点为[id1,iq1],定义第2组电流工作点为[id2,iq2],定义第3组电流工作点为[id3,iq3],定义第4组电流工作点为[id4,iq4];
8、(4)各电流工作点之间的关系满足:
9、
10、上述方程中,δid1、δid2分别为设定的d轴电流增量1和设定的d轴电流增量2;δiq1、δiq2分别为设定的q轴电流增量1和设定的q轴电流增量2。
11、其次,建立基于直流无功功率的满秩参数观测方程,具体步骤为:
12、(1)以电流工作点[id0,iq0]为基准,定义注入直流信号后的电流工作点为[id,iq],满足id=id0+δid、iq=iq0+δiq;其中,δid和δiq分别为注入的d轴电流信号幅值、q轴电流信号幅值;此时,在电流工作点[id,iq]下的直流无功功率q表达式为:
13、q=1.5ω[(ψad+lidδid)id+(ψaq+liqδiq)iq]
14、=1.5ω[idψad+iqψaq+idδidlid+iqδiqliq]
15、上述方程中,id和iq分别为d轴电机电流和q轴电机电流,ψad和ψaq分别为d轴电机视在磁链和q轴电机视在磁链,lid和liq分别为d轴电机增量电感和q轴电机增量电感,δid和δiq分别为注入d轴电流小信号和注入q轴电流小信号,q为直流无功功率,ω为电机电角速度;
16、(2)选择第1组、第2组、第3组、第4组电流工作点,依次定义它们的直流无功功率为q1、q2、q3、q4;同样以电流工作点[id0,iq0]为基准,将四组的直流无功功率表达式联立方程,可得参数观测方程:
17、q=1.5ωax
18、上述方程中,q为无功功率矩阵,满足:q=[q1,q2,q3,q4]t;x为转矩观测参数矩阵,满足:x=[ψad,ψaq,lid,liq]t;a为系数矩阵,满足:
19、
20、(3)为使得所述参数观测方程满秩,需确保系数矩阵a的行列式不为0,即:
21、deta=iq1iq2δid1δid2(δiq2-δiq1)(δid2-δid1)≠0
22、上述方程中,det为行列式运算符号。
23、接着,基于梯度下降法对所述基于直流无功功率的满秩参数观测方程进行迭代求解,得到转矩观测器参数,具体步骤为:
24、(1)针对第1组、第2组、第3组、第4组电流工作点对应的直流无功功率,将它们的估测值与实测值的误差均方值作为损失函数j:
25、
26、上述方程中,qi′是第i组电流工作点的直流无功功率估测值,由估测d轴视在磁链ψad′、估测q轴视在磁链ψaq′、估测d轴增量电感lid′、估测q轴增量电感liq′代入直流无功功率q表达式计算得到;qi是第i组电流工作点的无功功率实测值,满足:
27、qi=1.5(uqiidi-udiiqi)
28、上述方程中,udi、uqi分别为第i组电流工作点的d轴电机电压、q轴电机电压;idi、iqi分别为第i组电流工作点的d轴电机电流、q轴电机电流;
29、(2)基于直流无功功率q表达式,计算损失函数j对各电机参数的梯度:
30、
31、
32、
33、
34、上述方程中,ψadg、ψaqg、lidg、liqg分别为损失函数j对系数ψad、ψaq、lid、liq的梯度;δigdi、δigqi分别为第i组电流工作点的d轴电流增量、q轴电流增量,满足:δigdi=idi-id0、δigqi=iqi-iq0;
35、(3)基于所述损失函数j对各电机参数的梯度,建立基于梯度下降法的转矩观测器参
36、数迭代求解过程,具体步骤如下:
37、(3.1)定义迭代误差阈值ε;定义计数系数k=0;
38、(3.2)定义梯度矩阵g,满足:g=[ψadg,ψaqg,lidg,liqg]t;建立估测参数矩阵x′,满足:x′=[ψad′,ψaq′,lid′,liq′]t;定义第k次迭代的估测参数矩阵为x′(k),并给x′(k)赋初值;
39、(3.3)基于x′(k)、直流无功功率q表达式计算所述电流工作点分别对应的直流无功功率估测值q1′、q2′、q3′、q4′;
40、(3.4)基于在所述电流工作点稳态时采样得到的电压与电流,计算得到直流无功功率实测值q1、q2、q3、q4;
41、(3.5)基于步骤(3.3)所得的直流无功功率估测值和步骤(3.4)所得的直流无功功率实测值,计算得到第k次迭代的损失函数j(k);若损失函数j(k)>ε,则进行步骤(3.6);若损失函数j(k)≤ε,则进行步骤(3.9);
42、(3.6)基于步骤(3.3)所得的直流无功功率估测值、步骤(3.4)所得的直流无功功率实测值,计算得到第k次迭代的梯度矩阵g(k);
43、(3.7)基于g(k)、x′(k),可得第k+1次迭代的估测参数矩阵x′(k+1):
44、x′(k+1)=x′(k)-ηg(k)
45、上述方程中,η为梯度下降的更新步长;
46、(3.8)k=k+1,并进行步骤(3.3);
47、(3.9)此时损失函数j(k)小于等于迭代误差阈值ε,对应的估测参数矩阵x′(k)即为最终迭代求解得到的转矩观测器参数;
48、(4)基于迭代求解得到的转矩观测器参数,设计基于直流信号注入和直流无功功率的转矩观测器为:
49、
50、上述方程中,t为电机转矩,np为电机极对数。
51、然后,计算恒转矩下电机效率递增的交直轴电流增量,具体步骤为:
52、(1)针对第0组、第1组、第2组、第3组、第4组电流工作点,计算第0组电流工作点[id0,iq0]的有功功率p0:
53、p0=1.5(ud0id0+uq0iq0)
54、上述方程中,ud0为对应第0组直轴电流工作点id0的电压,uq0为对应第0组交轴电流工作点iq0的电压;
55、(2)计算第2组电流工作点[id2,iq2]的有功功率p2:
56、p2=1.5(ud2id2+uq2iq2)
57、上述方程中,ud2为对应第2组直轴电流工作点id2的电压,uq2为对应第2组交轴电流工作点iq2的电压;
58、(3)基于所计算的p0、p2,根据它们的差值计算直轴电流增量δidme:
59、δidme=-λ(p2-p0)/(id2-id0)
60、上述方程中,λ为电流扰动观测的更新步长;
61、(4)最后,基于迭代求解得到的转矩观测器参数,计算满足恒转矩tref的交轴电流增量δiqme:
62、δiqme=[tref/1.5np-(ψadiq0-ψaqid0)+(ψaq-lidiq0)δidme]/(ψad-liqid0)
63、上述方程中,tref为恒转矩参考值。
64、最后,基于所计算的交直轴电流增量,实现电流更新时序控制,具体为:
65、(1)根据直轴电流增量δidme和交轴电流增量δiqme,更新电流控制器的直、交轴参考电流idref和iqref:
66、
67、上述方程中,idref′和iqref′为更新后的直轴、交轴参考电流;
68、(2)计算对应idref′和iqref′状态下电机输出的有功功率p′:
69、
70、上述方程中,ud′和uq′为更新后的直轴、交轴电压;
71、(3)比较更新后的有功功率p′和更新前的有功功率p大小;若更新前后有功功率不相等,则再次计算直轴电流增量δidme和交轴电流增量δiqme,并按照步骤(1)公式更新直交轴电流参考值,最终直轴、交轴电流增量逐渐减小并接近零;
72、(4)经过不断地在线查找与更新迭代,有功功率将维持在最大功率输出工作点,电机以最优效率运行。
73、本发明的发明原理为:
74、为实现对转矩的准确观测,建立了直流信号注入和直流无功功率构建的转矩观测器模型。若采用考虑磁饱和铁损变化的永磁同步电机固有电压方程,去求解转矩观测器模型中存在的4个未知的电气参数,不可避免地存在欠秩问题。对此,利用在dq轴注入直流偏置信号的方式,并依据直流无功功率与视在磁链和增量电感之间的关系,通过稳态电流的时序设计,构建了模型参数辨识的满秩矩阵,并采用梯度下降法迭代求解,实现对转矩观测器的模型参数在线精确辨识。
75、基于转矩观测器模型参数的准确辨识,利用在线查找的方式,在恒定的转矩下,逐步调整电机电流以寻找最大效率点。以有功功率的变化方向与电流变化方向作为根据,当电流增加时,若有功功率增加,则继续增加电流,反之则减小电流;当电流减小时,若有功功率增加,则继续减小电流,反之则增加电流。通过不断地在线查找和迭代更新,最终使电机以最优效率运行。
76、本发明的有益效果在于:
77、1.采用直流信号注入的方式,在4个不同的电流向量状态下,利用无功功率构建了对视在磁链和增量电感在线辨识的满秩矩阵,该方法既考虑了电机的磁饱和现象,同时也避免了铁损的影响,减小辨识的复杂度,提高了观测的准确性;
78、2.采用在线查找的mept控制方法,在准确参数辨识所构建的转矩观测器下,逐步调整电流以寻找实际最大功率点。对于恒转矩负载运行工况下,可以减小参数变化或基于模型计算带来的误差,有效提升永磁同步电机的节能性能。
- 还没有人留言评论。精彩留言会获得点赞!