任意角位移双三相电机的共模电压通用消除方法及系统
本发明属于电机控制领域,更具体地,涉及一种任意角位移双三相电机的共模电压通用消除方法及系统。
背景技术:
1、在低压大功率应用中,与传统的三相电机相比,双三相电机具有相位冗余、低转矩脉动和较低的相电流额定值等优点,并广泛应用于机车牵引、航空航天和船舶推进等领域。双三相电机具有两套定子绕组,中性点隔离。根据两套三相绕组之间的偏差角度,双三相电机又可以分为对称六相电机(偏移0°或60°)和非对称六相电机(偏移30°)。非对称六相电机的特殊结构,可以天然的消除12k+6(k=0,1…)阶谐波转矩,因此它具有更好的应用性。另外通过相应的槽/极数组合可以选择其他的偏移角,如10°,15°,20°等。
2、在电机驱动系统中,逆变器在脉宽调制技术作用下,逆变器只能工作在离散的开关状态,从而在电机系统中产生高频共模电压。在共模电压激励下,由于共模回路的存在而在电机驱动系统中产生较大的共模漏电流。共模漏电流在系统中流通会引起额外的损耗,增加开关器件的应力,并会在转轴上感应出轴电压而引起轴承损坏。此外,共模电压由于具有很高的dv/dt也会在共模回路中产生共模电磁干扰。共模电压的抑制方法可以分为硬件和软件抑制两种方法。硬件抑制方法通过外加无源或有源滤波器对传播路径进行抑制,而软件抑制通过改变调制策略或拓扑结构对共模电压源进行抑制。软件抑制因其具有较小的成本和较高的功率密度而得到广泛应用。
3、目前的双三相电机共模电压消除算法主要是研究特定的角位移,不具有通用性。比如对于角位移0°的双三相电机,采用零共模幅值电压矢量合成参考电压来实现共模电压消除,最大调制比为1;对于角位移30°的双三相电机,可以采用脉冲移相对消来实现共模电压消除,最大调制比也为1;对于角位移60°的双三相电机,直接控制两套三相逆变器输出相反脉冲即可实现cmv的消除,最大调制比为1.154;然而以上几种方法在角位移改变时都不适用。此外,有一种基于spwm脉冲移相的方法可以实现任意角位移双三相电机的共模电压的对消,但是最大调制比只能达到1,这降低了系统的电压利用率,且移相操作较为复杂。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种任意角位移双三相电机的共模电压通用消除方法及系统,旨在解决解决各种角位移类型的双三相交流电机的共模电压带来的电磁干扰,同时抑制谐波电压损耗并提高系统的最大调制比。
2、为实现上述目的,本发明提供了一种任意角位移双三相电机的共模电压通用消除方法,包括以下步骤:
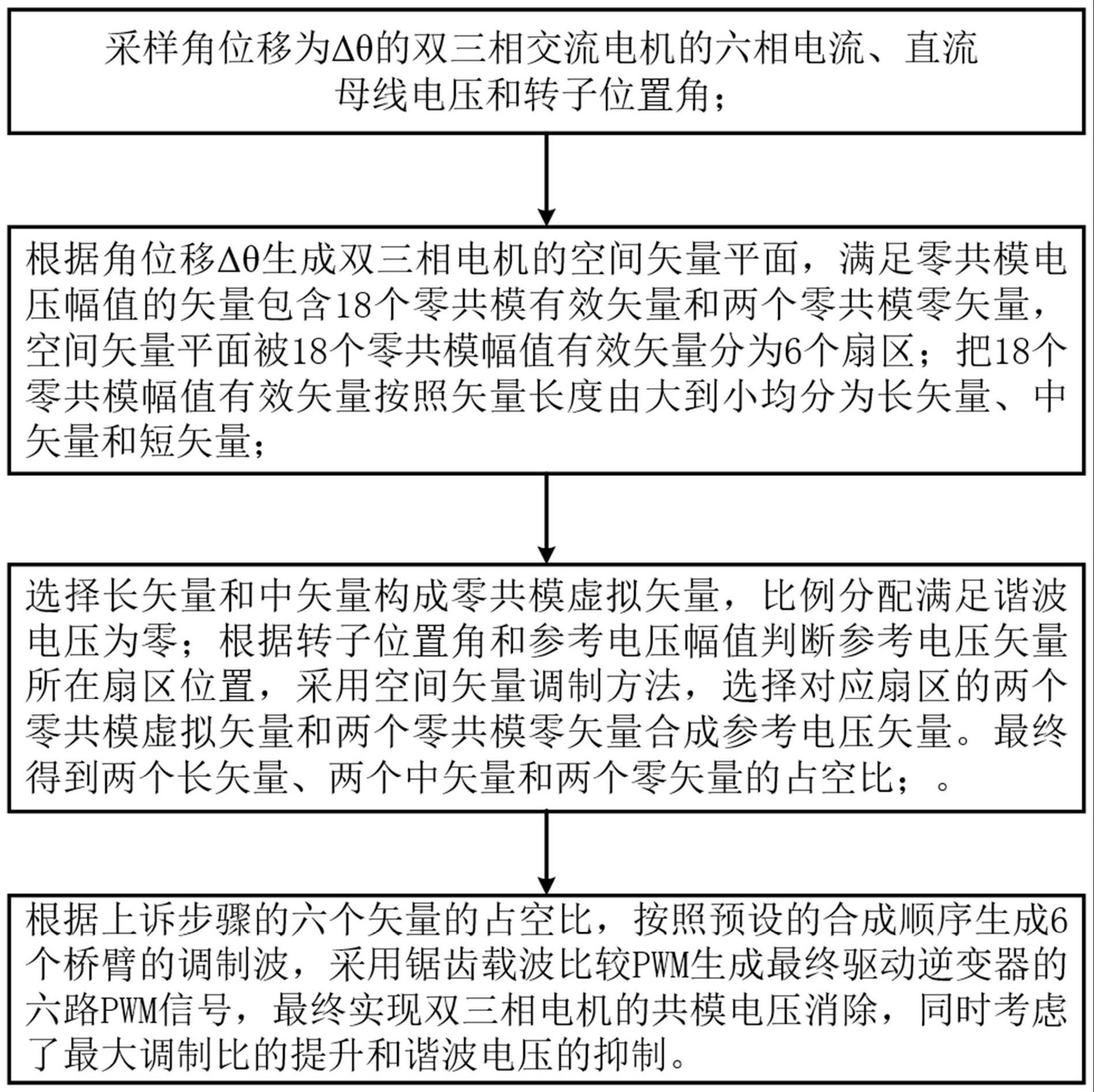
3、步骤一:采样角位移为δθ的双三相交流电机的六相电流、直流母线电压和转子位置角。
4、步骤二:根据角位移δθ生成双三相电机的空间矢量平面,满足零共模电压幅值的矢量包含18个零共模有效矢量和两个零共模零矢量,空间矢量平面被18个零共模有效矢量分为6个扇区;把18个零共模有效矢量按照矢量长度由大到小均分为长矢量、中矢量和短矢量;
5、步骤三:选择长矢量和中矢量构成零共模虚拟矢量,比例分配满足谐波电压为零;根据转子位置角和参考电压幅值判断参考电压矢量所在扇区位置,采用空间矢量调制方法,选择对应扇区的两个零共模虚拟矢量和两个零矢量合成参考电压矢量,最终得到两个长矢量、两个中矢量和两个零矢量的占空比;
6、步骤四:根据步骤三的六个矢量的占空比,按照一定的合成顺序来生成6个桥臂的调制波,采用锯齿载波比较pwm来生成最终驱动逆变器的六路pwm信号,最终实现双三相电机的共模电压消除,同时考虑了最大调制比的提升和谐波电压的抑制。
7、进一步地,所述步骤二中的零共模幅值矢量的选取原则要满足下式中的共模电压幅值为零。本发明把满足下式的所有矢量按照矢量长度是否为零分为18个零共模有效矢量和两个零共模零矢量,零共模有效矢量又按照长度大小分为6个长矢量vl、6个中矢量vm和6个短矢量vs。不同矢量的组合方式如下:
8、长矢量vl:[100][101],[110][100],[010][110],[011][010],[001][011],[101][001];
9、中矢量vm:[101][100],[100][110],[110][010],[010][011],[011][001],[101];
10、
11、短矢量vs:[110][001],[010][101],[011][100],[001][110],[101][010],[100][011];
12、零矢量v0:[000][111],[111][000]。
13、由于短矢量的使用会增加矢量合成复杂度和降低系统电压利用率,所以只选择长矢量和中矢量来合成参考电压矢量。双三相电机共模电压定义为:
14、vcm=(vcm1+vcm2)/2
15、=(va1+vb1+vc1+va2+vb2+vc2)/6
16、上式中vx(x=a1,b1,c1,a2,b2,c2)为每相桥臂的输出电压,对应于vdc/2或-vdc/2。三种矢量的幅值分别为:
17、
18、所有零共模幅值矢量把双三相电机矢量平面分为六个扇区,对应划分结果如下:
19、
20、因此,双三相电机角度偏差δθ使得扇区划分偏移的大小如下式所示:
21、
22、其中,θ为参考电压矢量与α轴的夹角。
23、进一步地,所述步骤三零共模虚拟矢量的构造方法以及参考矢量的合成方法为:
24、同方向上的长矢量vl和中矢量vm按照比例系数λ构造虚拟矢量vv,vv矢量的幅值为:
25、
26、比例系数满足:0≤λ≤1。当λ=1时,全部适用长矢量构造虚拟矢量,此时系统的最大调制比可以达到mmax,但是这种情况的调制波中将含有谐波电压,造成额外的损耗。而当λ=λz时,调制波中只含有基波电压和零序电压,因此可以抑制系统的谐波电压损耗,此时的最大调制比可以达到mmax。比例系数和最大调制比的关系具体如下:
27、
28、当控制周期为ts时,长矢量的驻留时间为λts,中矢量的驻留时间为(1-λ)ts。得到虚拟矢量之后,参考电压的合成方法与传统的svpwm算法一致。根据参考矢量所在扇区选择对应的两个零共模虚拟矢量,虚拟矢量的占空比d1和d2,以及零共模零矢量占空比d0的计算如下式,其中,θ是参考矢量与α轴的夹角,α轴与a相电压矢量方向重合;为参考矢量在所在扇区的夹角,满足
29、
30、根据比例系数λ和两个虚拟矢量的占空比d1和d2,得到两个长矢量vl的占空比dl1和dl2、两个中矢量vm的占空比dm1和dm2;根据零共模零矢量的占空比得到两个零共模零矢量的占空比均为d0/2。
31、进一步地,所述步骤四中在每个扇区调制过程中,生成6个调制波的两个长矢量、两个中矢量和两个零共模矢量的合成顺序为:
32、每个开关周期内,使两个所述零共模长矢量连续放置或两个所述零共模中矢量连续放置;
33、每个开关周期内,使一个所述零共模零矢量对称位于开关周期的两边,另一个所述零共模零矢量位于开关周期的中间;
34、参与到下一个扇区调制的零共模虚拟矢量对应的零共模长矢量和零共模中矢量的合成相对顺序不变。锯齿载波比较pwm等效空间矢量pwm的方法为:
35、空间矢量pwm的可以用spwm注入零序电压来等效,但是实现共模电压消除会使得脉冲不是居中对称的,因此需要采用锯齿载波来代替传统的三角载波。当四个有效零共模矢量和两个零共模零矢量按照一定排列顺序之后可以得到脉冲调制信号的上升沿和下降沿位置,然后与锯齿载波比较之后可以得到双三相电机的控制信号pwm1-6,最终实现系统的共模电压的消除。
36、本发明还提供了一种任意角位移双三相电机的共模电压通用消除系统,包括:计算机可读存储介质和处理器;
37、所述计算机可读存储介质用于存储可执行指令;
38、所述处理器用于读取所述计算机可读存储介质中存储的可执行指令,执行上述的任意角位移双三相电机的共模电压通用消除方法。
39、通过本发明所构思的以上技术方案,与现有技术相比,能够取得以下
40、有益效果:
41、(1)本发明提出的共模电压消除方法对任意角位移的双三相电机都适用,具有通用性。
42、(2)本发明采用四矢量合成参考电压以实现共模电压的消除,并引入了虚拟矢量来简化合成过程,矢量的合成顺序和分配关系同时考虑了谐波的抑制和调制比的提升。
43、(3)本发明采用载波比较pwm来等效空间矢量pwm,从而计算出任意角位移的共模电压消除方法的零序注入大小和方向,最终可以求得考虑谐波抑制下的最大占空比。如30°角位移的双三相电机,考虑谐波抑制时最大调制比为1.035,不考虑谐波抑制时最大调制比为1.115。在角位移为0°时的最大调制比为1,30°时的最大调制比为1.035,60°时的最大调制比为1.154。
44、(4)本发明提出的共模电压通用消除方法对共模电压的消除仅涉及pwm信号的改变,不需要增加硬件,仅通过改进软件算法就可实现,通用性强,因此不会对电机的控制产生影响,能够保护电机轴承,提高系统可靠性。
- 还没有人留言评论。精彩留言会获得点赞!