一种电机扭矩脉动控制方法及装置与流程
本技术涉及车辆,尤其涉及一种电机扭矩脉动控制方法及装置。
背景技术:
1、随着纯电动汽车产业的快速发展,永磁同步电机由于具有功率密度大、效率高等优点被广泛应用于纯电动汽车的驱动系统中。然而,电机动力输出的扭矩脉动所产生的电磁噪声以及扭转振动等问题严重影响了车上人员的驾乘体验。其电机输出的扭矩脉动包括永磁同步电机齿槽扭矩脉动。
2、现有解决永磁同步电机齿槽扭矩脉动一般通过优化电机设计实现,但是在现有的扭矩脉动控制方法中,在改善扭矩脉动的同时也增大了电流环的调节压力,容易激发车辆系统的不稳定性,从而导致在控制过程中整车的安全性较低。
技术实现思路
1、本技术实施例提供一种电机扭矩脉动控制方法及装置,以解决现有电机扭矩脉动控制方法中整车安全性较低的问题。
2、为了解决上述技术问题,本技术是这样实现的:
3、第一方面,本技术实施例提供了一种电机扭矩脉动控制方法。该方法包括:
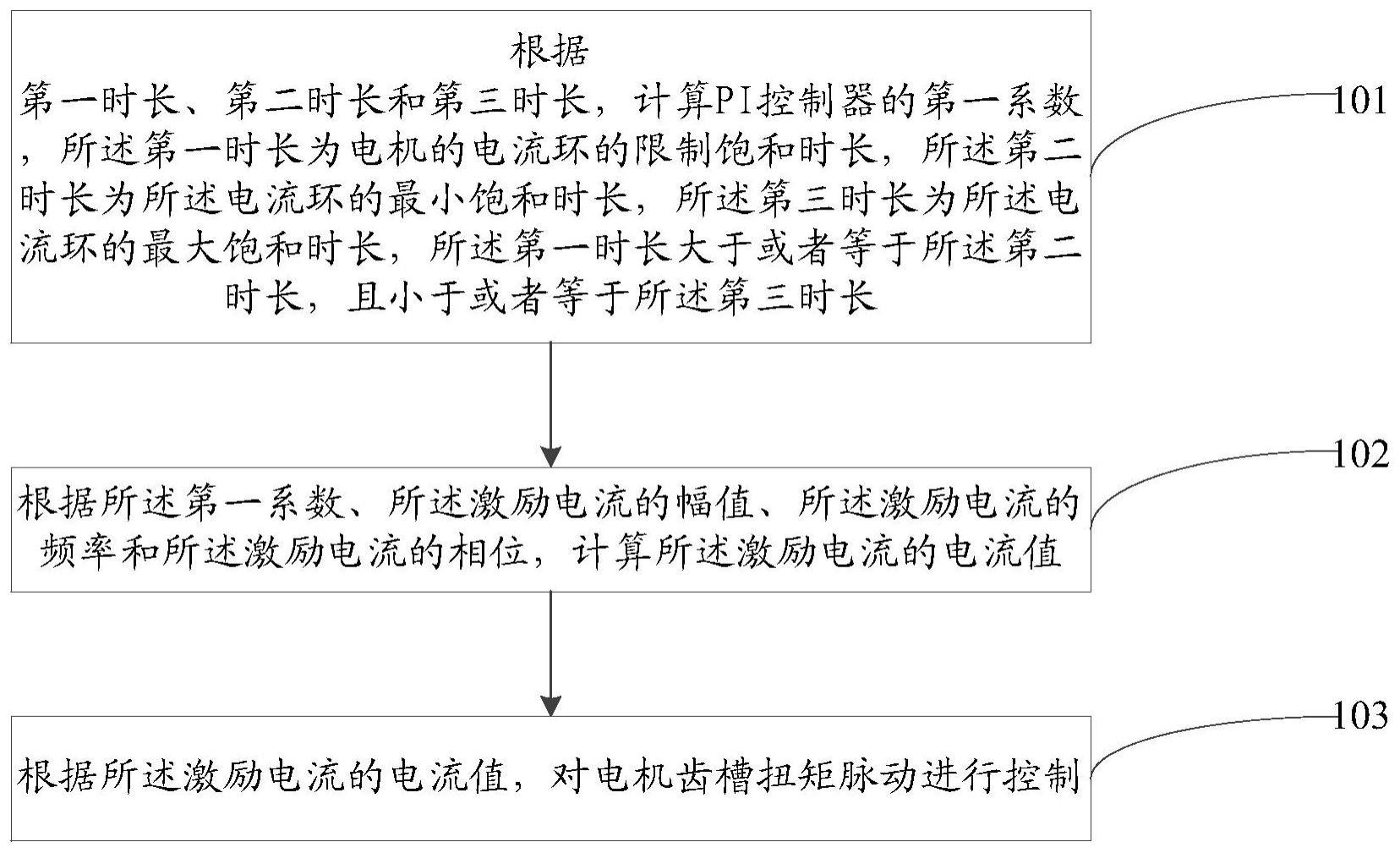
4、根据第一时长、第二时长和第三时长,计算pi控制器的第一系数,所述第一时长为电机的电流环的限制饱和时长,所述第二时长为所述电流环的最小饱和时长,所述第三时长为所述电流环的最大饱和时长,所述第一时长大于或者等于所述第二时长,且小于或者等于所述第三时长;
5、根据所述第一系数、所述激励电流的幅值、所述激励电流的频率和所述激励电流的相位,计算所述激励电流的电流值;
6、根据所述激励电流的电流值,对电机齿槽扭矩脉动进行控制。
7、可选地,所述根据所述第一系数、所述激励电流的幅值、所述激励电流的频率和所述激励电流的相位,计算所述激励电流的电流值之前,所述方法还包括:
8、根据电机定子温度、电机转速和电机输出扭矩,确定所述激励电流的幅值和所述激励电流的相位。
9、可选地,所述根据所述第一系数、所述激励电流的幅值、所述激励电流的频率和所述激励电流的相位,计算所述激励电流的电流值之后,所述方法还包括:
10、根据目标控制周期内的第一直流分量,确定所述目标控制周期内的第一补偿电压,其中,所述第一直流分量为目标阶次谐波的第一轴电流的直流分量,所述第一补偿电压为所述目标阶次谐波的第一轴补偿电压,所述第一轴为所述同步旋转坐标系中的d轴或者q轴;
11、根据所述目标控制周期之前的n个控制周期内的第一直流分量,计算第二系数,其中,所述第二系数用于表征所述n个控制周期内的第一直流分量的波动情况;
12、在所述第二系数小于或者等于第一预设值的情况下,通过所述第一补偿电压对所述目标阶次谐波的第一轴扭矩脉动进行控制。
13、可选地,根据目标控制周期内的第一直流分量,确定所述目标控制周期内的第一补偿电压,包括:
14、根据目标控制周期内的第一直流分量,确定所述目标控制周期内的第三补偿电压;
15、将所述第三补偿电压变换到目标阶次基波的同步旋转坐标系中,确定所述目标控制周期内的第一补偿电压。
16、可选地,所述根据目标控制周期内的第一直流分量,确定所述目标控制周期内的第三补偿电压,包括:
17、将所述第一直流分量和预设直流分量之差输入pi调节器,确定所述目标控制周期内的第四补偿电压,所述第四补偿电压包括比例补偿电压和积分补偿电压;
18、通过限制函数对所述第四补偿电压进行限制,得到所述目标控制周期内的第三补偿电压。
19、可选地,所述pi调节器设置有第一电压,所述第一电压用于调节积分补偿电压;
20、所述将所述第一直流分量和预设直流分量之差输入pi调节器,确定所述目标控制周期内的第四补偿电压之前,所述方法还包括:
21、根据退饱和系数、所述目标控制周期的上一控制周期内的第四补偿电压和所述目标控制周期的上一控制周期内的第三补偿电压,确定所述第一电压。
22、可选地,所述根据目标控制周期内的第一直流分量,得到所述目标控制周期内的第一补偿电压之前,所述方法还包括:
23、获取电机的三相电流;
24、将所述三相电流变换到目标阶次谐波的同步旋转坐标系中,得到所述目标阶次谐波的第一轴电流;
25、将所述目标阶次谐波的第一轴电流输入低通滤波器进行滤波处理,得到所述第一直流分量。
26、第二方面,本技术实施例还提供一种电机扭矩脉动控制装置。该电机扭矩脉动控制装置包括:
27、第一计算模块,用于根据第一时长、第二时长和第三时长,计算pi控制器的第一系数,所述第一时长为电机的电流环的限制饱和时长,所述第二时长为所述电流环的最小饱和时长,所述第三时长为所述电流环的最大饱和时长,所述第一时长大于或者等于所述第二时长,且小于或者等于所述第三时长;
28、第二计算模块,用于根据所述第一系数、所述激励电流的幅值、所述激励电流的频率和所述激励电流的相位,计算所述激励电流的电流值;
29、第一控制模块,用于根据所述激励电流的电流值,对电机齿槽扭矩脉动进行控制。
30、可选地,所述装置还包括:
31、第一确定模块,用于根据电机定子温度、电机转速和电机输出扭矩,确定所述激励电流的幅值和所述激励电流的相位。
32、可选地,所述装置还包括:
33、第二确定模块,用于根据目标控制周期内的第一直流分量,确定所述目标控制周期内的第一补偿电压,其中,所述第一直流分量为目标阶次谐波的第一轴电流的直流分量,所述第一补偿电压为所述目标阶次谐波的第一轴补偿电压,所述第一轴为所述同步旋转坐标系中的d轴或者q轴;
34、第三计算模块,用于根据所述目标控制周期之前的n个控制周期内的第一直流分量,计算第二系数,其中,所述第二系数用于表征所述n个控制周期内的第一直流分量的波动情况;
35、第二控制模块,用于在所述第二系数小于或者等于第一预设值的情况下,通过所述第一补偿电压对所述目标阶次谐波的第一轴扭矩脉动进行控制。
36、可选地,所述第二确定模块,包括:
37、第一确定单元,用于根据目标控制周期内的第一直流分量,确定所述目标控制周期内的第三补偿电压;
38、第二确定单元,用于将所述第三补偿电压变换到目标阶次基波的同步旋转坐标系中,确定所述目标控制周期内的第一补偿电压。
39、可选地,所述第一确定单元,包括:
40、第一确定子单元,用于将所述第一直流分量和预设直流分量之差输入pi调节器,确定所述目标控制周期内的第四补偿电压,所述第四补偿电压包括比例补偿电压和积分补偿电压;
41、第二确定子单元,用于通过限制函数对所述第四补偿电压进行限制,得到所述目标控制周期内的第三补偿电压。
42、可选地,所述pi调节器设置有第一电压,所述第一电压用于调节积分补偿电压以避免pi调节中积分环节的饱和;
43、所述装置还包括:
44、第三确定模块,用于根据退饱和系数、所述目标控制周期的上一控制周期内的第四补偿电压和所述目标控制周期的上一控制周期内的第三补偿电压,确定所述第一电压。
45、可选地,所述装置还包括:
46、第一获取模块,用于获取电机的三相电流;
47、第四确定模块,用于将所述三相电流变换到目标阶次谐波的同步旋转坐标系中,得到所述目标阶次谐波的第一轴电流;
48、第五确定模块,用于将所述目标阶次谐波的第一轴电流输入低通滤波器进行滤波处理,得到所述第一直流分量。
49、第三方面,本技术实施例还提供一种电机扭矩脉动控制装置,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述的电机扭矩脉动控制方法的步骤。
50、第四方面,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的电机扭矩脉动控制方法的步骤。
51、本技术实施例的电机扭矩脉动控制方法,包括根据第一时长、第二时长和第三时长,计算pi控制器的第一系数,所述第一时长为电流环的限制饱和时长,所述第二时长为所述电流环的最小饱和时长,所述第三时长为所述电流环的最大饱和时长,所述第一时长大于或者等于所述第二时长,且小于或者等于所述第三时长;根据所述第一系数、所述激励电流的幅值、所述激励电流的频率和所述激励电流的相位,计算所述激励电流的电流值;根据所述激励电流的电流值,对电机齿槽扭矩脉动进行控制。该方法通过引入第一系数来调节激励电流的幅值,从而降低在通过激励电流控制电机的扭矩脉动时的电流环的调节压力,保持车辆系统的稳定性,从而提高在扭矩控制过程中整车的安全性。
- 还没有人留言评论。精彩留言会获得点赞!