一种孤岛微电网负荷频率控制方法
本发明涉及互联电网信息化控制,尤其是涉及一种基于事件触发分数阶piλ-pdμ的孤岛微电网负荷频率控制方法。
背景技术:
1、负荷频率控制(load frequency control,lfc)的主要目的是维持发电机组负荷的实时动态平衡,以保证电网频率处于额定值。相较于传统互联电网,集成的高比例可再生能源的孤岛微电网由于有限的装机容量和随机变化的可再生能源有功输出,其频率稳定性更为脆弱。因此,众多学者针对孤岛微电网的负荷频率控制策略开展了深入研究。
2、现代电力系统中,lfc是在适当设计的控制器的帮助下进行的,一个合适的lfc控制器设计主要取决于控制器类型和设计目标的正确选择。近年来,为了使lfc在电力系统中获得良好的性能,研究人员提出了许多控制方法。文献【load frequency control ofsingle-area power system with pi–pd controller design for performanceimprovement】设计了一种对参数变化具有鲁棒性和良好的干扰抑制能力的piλ-pdμ控制器,用于单区域单源或多源电力系统的负载频率控制,将加权几何中心法应用于闭环控制系统的稳定边界轨迹,得到piλ-pdμ控制器参数。然而,由于该文献仅采用传统的稳定边界轨迹法整定piλ-pdμ控制器参数,系统的控制性能仍然具有一定的提升空间。
3、区别于配置专用信道的互联电网,孤岛微电网有限的带宽资源需要承载频率控制、电压调整、视频监控、计量结算等应用。然而,周期触发控制方案指令计算操作频繁,网络带宽的占用率较高,会导致孤岛微电网通信负载和控制中心的计算负载过重。得益于云计算、边缘计算技术在电力系统中的广泛应用,在微电网数据源侧进行本地数据存储与分析,并以“按需传输”的工作模式进行控制量与状态量的交互,能够有效降低微电网的通信和计算负载。在此基础上,近年来有学者提出了基于事件触发的lfc设计方案。事件触发控制的基本思路为:控制信号只有在达到预先设定的阈值条件时才能传输;通过触发条件的判断,减少了不必要的信号传输,进而减轻了通信网络中的通信负担。文献【loadfrequency control of time-delayed power system based on event-triggeredcommunication scheme】提出了一种基于事件触发的切换控制方法,并讨论了事件触发机制中事件间隔时间的下限,通过仿真验证了系统在网络引起的时延和测量干扰下的鲁棒稳定性,并减少了发送的测量数量。然而,现有的方法一方面虽然在一定程度上可以降低计算和通信成本,但是控制性能仍有较大提升空间。另一方面,鲜有将事件触发策略与分数阶piλ-pdμ控制器相结合的设计及应用研究。
技术实现思路
1、本发明的目的是为了提供一种基于事件触发分数阶piλ-pdμ的孤岛微电网负荷频率控制方法,以解决现有周期触发控制方案存在的带宽占用率高、控制中心计算负荷重等问题,并实现更优的负荷频率控制性能。
2、本发明的目的可以通过以下技术方案来实现:
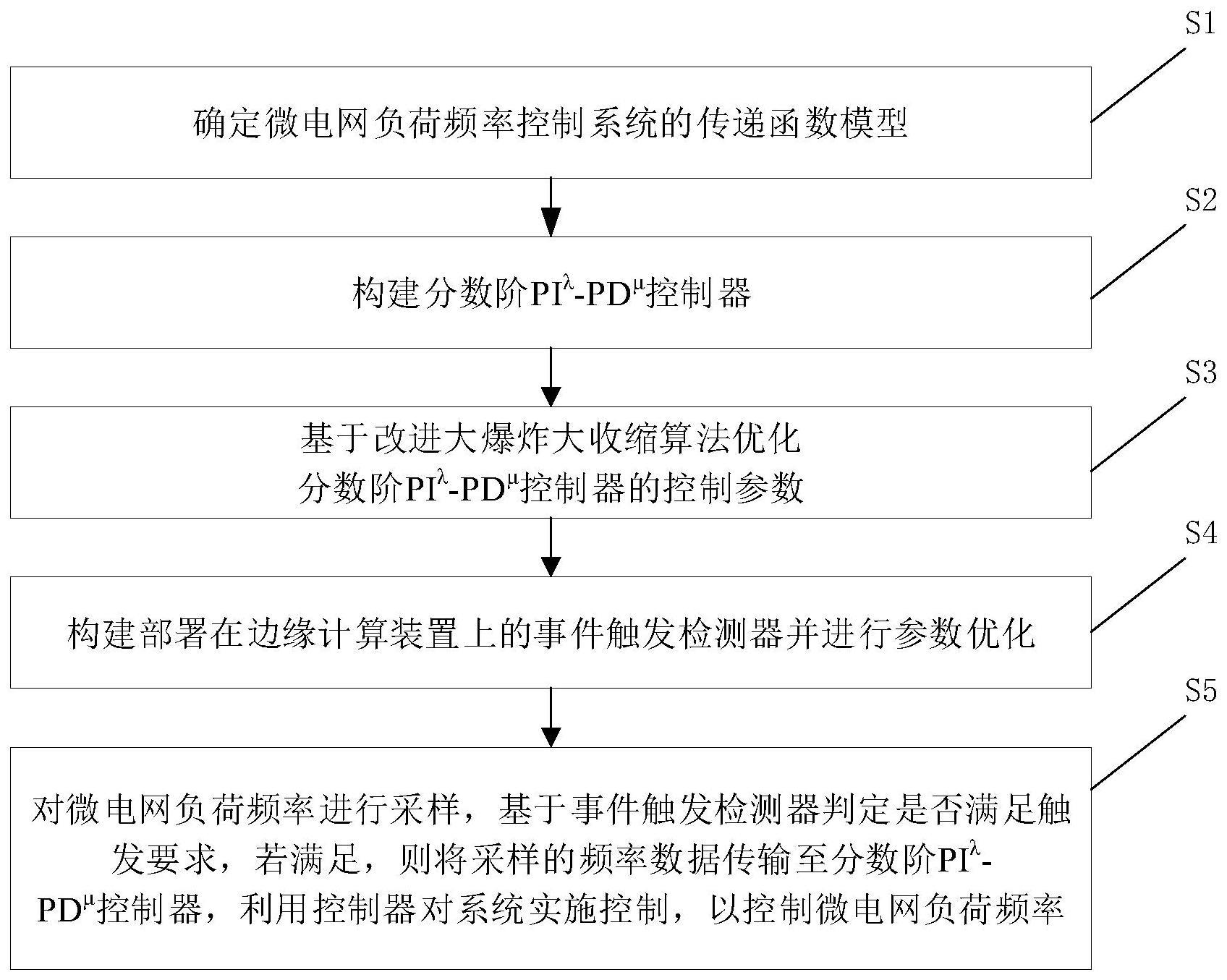
3、一种基于事件触发分数阶piλ-pdμ的孤岛微电网负荷频率控制方法,包括以下步骤:
4、s1、确定微电网负荷频率控制系统的传递函数模型;
5、s2、基于传递函数模型,针对参数不确定性和外部功率扰动问题,构建分数阶piλ-pdμ控制器;
6、s3、基于改进大爆炸大收缩算法(bb-bc3)优化分数阶piλ-pdμ控制器的控制参数;
7、s4、构建部署在边缘计算装置上的事件触发检测器,基于改进大爆炸大收缩算法优化事件触发检测器的参数;
8、s5、对微电网负荷频率进行采样,基于事件触发检测器判定是否满足触发要求,若满足,则将采样的频率数据传输至分数阶piλ-pdμ控制器,利用控制器对系统实施控制,以控制微电网负荷频率。
9、所述微电网负荷频率控制系统的模型组件包括调速器、涡轮(非再加热)、负载和机器以及下垂特性,其传递函数gy(s)表示为:
10、
11、其中,kp为电力系统增益,tp电力系统时间常数,tt为涡轮机时间常数,tg为调速器时间常数,1/r为下垂特性。
12、所述步骤s2中,分数阶piλ控制器表示为:
13、
14、其中,kf为分数阶piλ控制器的比例增益系数,ki为分数阶piλ控制器的积分增益系数。
15、所述步骤s2中,分数阶pdμ控制器表示为:
16、cpdμ(s)=kp+kdsμ
17、其中,kp为分数阶pdμ控制器的比例增益系数,kd为分数阶pdμ控制器的微分增益系数。
18、所述分数阶piλ-pdμ控制器的稳定边界计算包括以下两个步骤:
19、1)内环稳定边界轨迹计算:引入一个带有增益-相位裕度测试器ae-jφ来评估控制参数的频域性能指标,确定分数阶pdμ控制器闭环特征方程,计算内环稳定边界轨迹;
20、2)外环稳定边界轨迹计算:确定包括分数阶pdμ控制器在内的闭环传递函数,计算外环稳定边界轨迹。
21、所述s3包括以下步骤:
22、s31、初始化控制参数,确定初始原子解和算法寻优参数的搜索空间范围,其中,所述空间范围为分数阶piλ-pdμ控制参数稳定域,初始原子解基于改进加权几何中心方法确定;
23、s32、将改进大爆炸大收缩算法的候选解以极坐标(θ,r)表示,并通过改变极角θ将搜索空间以原子解为圆心分成q等份;
24、s33、大爆炸阶段原子解迭代更新:各个区域qc(c=1,2,...,q)生成相同数量的候选解,每次迭代生成的大爆炸阶段的候选解由前一次大收缩阶段收缩的原子解通过随机爆炸产生:
25、
26、其中,θnew和rnew为新产生的候选解,θ是原子解极轴的角度,r表示与原子解点的距离,βθ为区间[-1,1]的随机数,βr为区间[-1,1]的随机数,αθ和αr为空间限制参数,i为当前迭代次数,rmax和rmin为r候选解的上界和下界;θmax,c和θmin,c为θ备选解在不同区域qc确定的搜索空间的上界和下界:
27、
28、s34、大收缩阶段原子解迭代更新:
29、假设大爆炸得到粒子移动的最终位置(θfp,rfp),粒子从原子解移动到该方向上的最终位置,移动过程中粒子的适应度值为:
30、fj=fcost(θj,rj),j=1,2,..,p
31、其中fj是适应度函数的值,p是粒子经过的位置个数;
32、粒子移动过程中的位置信息为:
33、
34、粒子移动的每个位置(θj,rj)的适应度值为fj,选择适应度值最小的位置作为该方向上的候选解,即:(θmin,rmin)=(θfmin,rfmin);
35、将所有的适应值最小的候选解通过收缩公式得到大收缩阶段原子解:
36、
37、式中,m为备选解的个数,(θmin,k,rmin,k)为第k个备选解,fmin(θmin,k,rmin,k)为第k个备选解的适应度值;
38、s35、经过n次迭代后,每一轮都会产生一个最优候选解(θ,r)i,i=1,2,3...n;控制器的最优控制参数通过初始原子解和迭代产生的最优候选解叠加得到:
39、
40、其中,ψ函数将极坐标转化为直角坐标,(θ0,r0)为初始原子解,(θi,ri)为每次迭代产生的原子解。
41、所述改进加权几何中心方法具体为:
42、分别在分数阶piλ控制器和分数阶pdμ控制器的稳定域中选取三个采样点:稳定域的峰值点、虚边界与实边界相交的两个采样点,基于三个采样点的坐标加权平均值分别确定分数阶piλ控制器和分数阶pdμ控制器的改进几何加权中心点。
43、由采样周期为hnom的同步相量测量装置对频率进行采样,并将每个采样瞬间获取的频率偏差保存在边缘计算装置中,由事件触发检测器确定当前时刻的频率偏差是否上传至控制器,边缘侧事件触发的通信规则如下:
44、|e(t)-e(t-hact)|≥δe
45、hact≥hmax
46、其中,e(t-hact)为前一个事件触发时刻的误差,e(t)为当前时刻t的误差,δe为误差事件触发阈值,hmax为两个相邻两个触发时刻的最大允许间隔。
47、所述事件触发检测器的参数优化的目标函数为:
48、
49、其中,cn表示控制器控制次数,t表示控制时间,σevent表示基于事件触发策略的系统误差积分,σ表示在连续域上的系统误差积分,表示的通信带宽情况,为性能下降的损失;
50、事件触发检测器的参数优化的约束条件为:
51、δe∈[0,+∞),hmax=ahnom(a∈n+),|δf|≤δfmax,|ts|≤tsmax,|tr|≤trmax
52、其中,δfmax为最大增量频率偏差,ts表示调节时间,tsmax表示最大允许调节时间,tr是上升时间,trmax表示最大允许上升时间。
53、所述基于改进大爆炸大收缩算法优化事件触发检测器的参数包括以下步骤:
54、s41、确定改进大爆炸大收缩算法中的相关参数:算法迭代次数n,算法每次爆炸产生备选解的个数m,空间限制参数α和粒子经过位置个数p,确定需要优化的事件触发检测器的参数hmax和δe;
55、s42、初始化改进大爆炸大收缩算法第一次迭代候选解;
56、s43、设定改进大爆炸大收缩算法的适应度函数为目标函数;
57、s44、在改进大爆炸大收缩算法的大收缩阶段,对分布于目标搜索空间的最终候选解进行适应值计算,并收敛产生原子解;
58、s45、在改进大爆炸大收缩算法大爆炸阶段,对原子解爆炸产生新一代的备选解;
59、s46、重复s44和s45,直至达到最大迭代次数时,停止迭代,完成事件触发检测器的参数优化。
60、与现有技术相比,本发明具有以下有益效果:
61、(1)本发明针对微电网频率稳定性问题,提出了基于事件触发分数阶piλ-pdμ的孤岛微电网负荷频率控制方法,避免了周期触发控制存在的带宽占用率高、控制中心计算负荷重等问题,同时能够实现更优的负荷频率控制性能。
62、(2)本发明通过在边缘计算装置上设置事件触发器,仅当频率偏差超过预设阈值后才进行状态量上传与控制指令更新,从而节约有限的通信资源。
63、(3)本发明在云端控制中心设置基于分数阶的piλ-pdμ控制器,实现比传统整数pid控制方案更高的控制自由度与更强的鲁棒性。
64、(4)本发明设计了一种基于改进的大爆炸大收缩算法(bb-bc3)的分数阶piλ-pdμ控制器参数优化策略,以得到更优的控制器参数。
- 还没有人留言评论。精彩留言会获得点赞!