带母线电压稳压功能的电机驱动装置的制作方法
本发明涉及升压,具体涉及带母线电压稳压功能的电机驱动装置。
背景技术:
1、对于电机内装式混凝土振动器,传统的控制实现拓扑会将市电交流信号通过整流电路整流为直流电压,或直接引入直流输入电压,然后通过变频等技术实现对工具动作机构的驱动控制。
2、整流后的直流母线电压值与输入交流电压值的对应关系为:
3、vdc=kp*vac_rms
4、其中:vdc为整流后的直流母线电压值,简称母线电压;
5、vac_rms为输入交流电压有效值;
6、kp为交流电压有效值与交流电压峰值的峰值系数,简称峰值系数,对于标准正弦交流电压
7、因此,此种拓扑得到的直流母线电压受输入电压影响,随输入电压波动,对后级动作机构(包含电机)的驱动控制造成干扰,增加了控制难度。尤其是当输入电压偏低时,或输入交流电压峰值系数偏低时,由于整流后的母线电压值vdc=kp*vac_rms,当vac_rms偏低时,或kp偏低时,导致vdc偏低,从而后级动作机构的输出能力受到此时最低直流电压的限制。传统控制实现方式下为了保证输出的稳定,通常会主动降低转速和输出功率来确保输出的稳定,即降额输出。
8、同时,为了平衡此种低输入电压工况,为了让系统在低电压输入情况下仍然能稳定工作,所匹配的电机在设计参数上需要减弱电机的磁场力,来适应低输入电压的工况,从而导致系统整体效率降低。
技术实现思路
1、本发明的目的在于提供带母线电压稳压功能的电机驱动装置,解决以下技术问题:
2、现有的电机稳压装置为了保证输出的稳定,通常会主动降低转速和输出功率来确保输出的稳定,即降额输出,严重影响需要保持较大输出功率的混凝土振动器或洗衣机的电机。
3、本发明的目的可以通过以下技术方案实现:
4、带母线电压稳压功能的电机驱动装置,包括:
5、整流模块,用于将交流电压整流为直流输入电压,将直流输入电压传输至无源升压电路;
6、升压电路,用于对母线电压进行抬升和稳定控制,所述升压电路的输入端连接到整流模块的输出端,所述升压电路的输出端连接到半桥逆变模块的输入端;其中,半桥逆变模块的输入电压为母线电压;
7、半桥逆变模块,用于对电机进行驱动控制,所述半桥逆变模块的输出端连接到电机;
8、电机,用于为混凝土振动器或洗衣机提供动力源;
9、数字控制模块,用于在电压降低或电机的输出功率降低时,控制升压电路抬升电压;其中,在电机处于发电机状态,且电机对母线电压无影响时,控制模块控制升压电路将母线电压抬升至大于电源输入交流电压的有效值的1.42倍。
10、作为本发明进一步的方案:所述升压电路设置为有源升压电路。
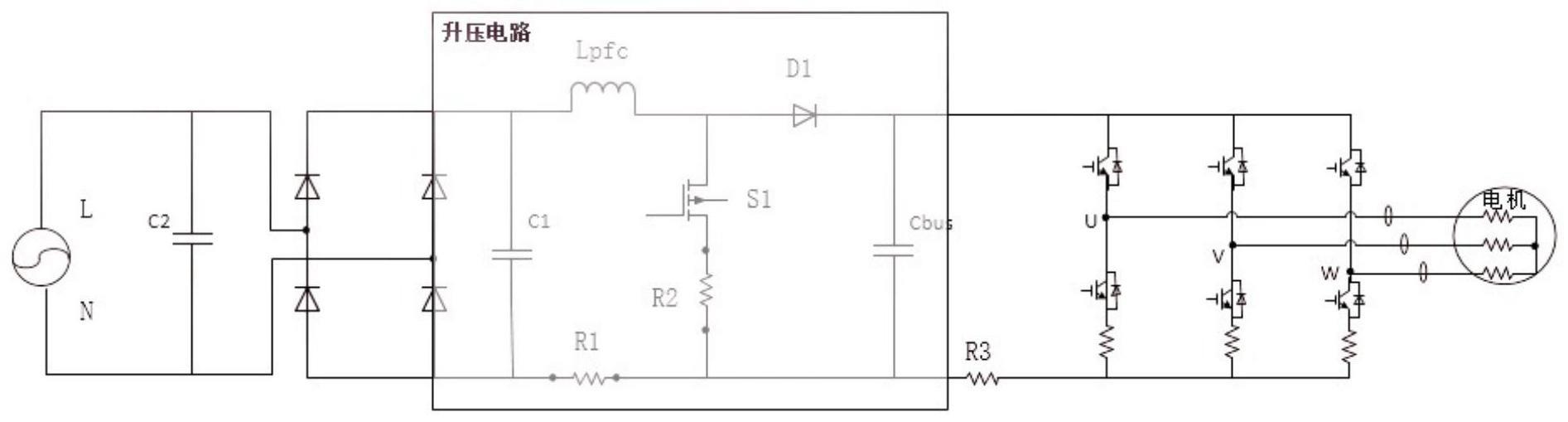
11、作为本发明进一步的方案:所述有源升压电路设置为boost pfc升压电路,所述boost pfc升压电路包括:电感lpfc,二极管d1、mod管s1、电容c1和电容cbus;
12、所述整流模块的输出端并联与电容c1的两端并联,所述电容c1的第一端通过电感lpfc连接到二极管d1的阳极,所述电容c1的第二端连接到电阻r1的第一端,所述mod管s1的漏极连接到电感lpfc和二极管d1的阳极之间,所述mod管s1的源极连接到电阻r2的第一端,所述电阻r2的第二端连接到电阻r1的第二端,所述电阻r2的第二端和电阻r1的第二端的连接点与二极管d1的阴极之间并联电容cbus,所述电容cbus两端并联到半桥逆变模块的输入端。
13、作为本发明进一步的方案:所述有源升压电路设置为全桥整流升压电路。
14、作为本发明进一步的方案:所述升压电路设置为无源升压电路。
15、作为本发明进一步的方案:所述控制模块对所述升压电路的交流输入电压vg、交流输入电流ig和直流母线电压vdc进行采样后,通过pfc控制算法,通过采集的交流输入电压vg、交流输入电流ig、直流母线电压vdc,建立pfc双环控制环路,对直流母线电压和输入交流电流进行控制,得到对交流电流pf值控制和pwm控制信号,并通过升压电路进行电压抬升。
16、作为本发明进一步的方案:控制模块通过有源pfc控制升压电路抬升和稳定母线电压,包括以下步骤:
17、通过设定的目标直流母线电压值,与实际采样的母线电压的差值,通过pi计算得到输入交流电流的幅值参考;
18、将输入交流电流幅值参考与输入交流电流的波形参考相乘,得到输入交流电流的瞬时值参考;将输入交流电流的瞬时值参考与采样得到的输入交流电流值相减得到的差值,通过pi控制器计算得到输出的控制pwm信号。
19、作为本发明进一步的方案:所述控制模块,包括:
20、输入采样单元,用于对所述升压电路的母线直流输入电压vg和母线直流输入电流ig进行采样,并将采样信息传输至电压前馈型数字矢量控制单元;
21、输出采样单元,用于对半桥逆变模块的输出端的三相电流ia、ib和ic进行采样,利用上述电流采样对电机的位置和速度通过观测器进行估算,将电机的位置和速度传输至电压前馈型数字矢量控制单元;
22、电压前馈型数字矢量控制单元,根据接收的升压电路的母线直流输入电压vg、母线直流输入电流ig、半桥逆变模块的输出端的三相电流ia、ib和ic、电机的位置和速度数据,在电压前馈型数字矢量控制电流环中,通过比例和积分控制,得到前馈输入电压和前馈输出电压。
23、作为本发明进一步的方案:在电压前馈型数字矢量控制电流环中,通过比例和积分控制,得到前馈输入电压和前馈输出电压包括以下步骤:
24、s1:通过接收的速度测量数据进行速度环pi控制算法,得到pfc内环参考电流,同时根据母线直流输入电压vg和母线直流输入电流ig,在pfc内环中通过pi控制算法得到前馈电流;
25、s2:根据电机的位置数据经过clark和park变换计算得到电流参考值;
26、s3:根据前馈电流和电流参考值,在电压前馈型数字矢量控制电流环中,通过电压前馈型数字矢量控制电流环的pi调节器中的比例项和积分中得到前馈输入电压和前馈输出电压;
27、s4:将前馈输入电压和前馈输出电压传输至svpwm调制器。
28、作为本发明进一步的方案:所述控制模块,还包括:
29、母线电压控制单元,通过测量升压电路中电容c1上的电压vc1得到母线电压有效值,并将母线电压有效值传输至pwm调制器;母线电压通过以下公式计算:
30、
31、其中,vdc为母线电压有效值,vc1为电容c1两端电压,d0为母线电压控制环生成占空比,频率f为2倍逆变器工作频率的pwm波;
32、pwm调制器,用于根据母线电压控制单元计算得到的母线电压有效值,生成pwm波,并将pwm波传输至驱动信号合成单元;
33、svpwm调制器,用于根据电压前馈型数字矢量控制单元输入的前馈输入电压和前馈输出电压,产生svpwm波,并将svpwm波传输至驱动信号合成单元;
34、驱动信号合成单元,用于将svpwm调制器产生的svpwm波直插进pwm调制器产生的pwm波中,生成pwm控制信号,将生成pwm控制信号传输至半桥逆变模块。
35、作为本发明进一步的方案:母线电压控制环生成占空比d0的最大值小于前馈输出电压产生svpwm波的零矢量。
36、本发明的有益效果:
37、(1)本发明通过控制模块和升压电路将输入电压,控制在特定电压以上,并稳定输出电压,供后级驱动部分使用;从而实现了,后级驱动机构稳定输出,电压降低时,不会降低转速和输出功率来确保输出的稳定,同时在检测到输出功率降低时,及时进行升压,保证电机的输出功率的稳定;并且,对于动作机构是电机的电动工具,所匹配的电机可以选择增强磁力的电机进行匹配,从而提高系统整体效率,提升系统稳定性。
38、(2)本发明通过在电机退出发电机状态,且电机对母线电压升压影响消除后,控制模块控制升压电路将母线电压抬升至大于电源输入交流电压的有效值的1.42倍;通过控制模块控制vbus大于vac*1.42倍,避免电机电动机机状态时,由于母线电压偏低,影响电机的输出功率,保证电机的稳定运行。
- 还没有人留言评论。精彩留言会获得点赞!