一种基于预测控制条件下的模糊超螺旋滑模观测器电感辨识方法
本发明涉及电网预测控制,具体涉及一种基于预测控制条件下的模糊超螺旋滑模观测器电感辨识方法。
背景技术:
1、并网逆变器大多数都是电压源型两电平的逆变器,其主要分为单相逆变器和三相逆变器,三相电压源大多数应用于再生能源系统,因此对逆变器的输出电压和输出电流有很高的要求,因此研究并网逆变器的控制尤为重要。
2、并网逆变器模型预测控制,有着设计简单、容易实现。动态响应快等优点被广泛运用,但考虑到温度、老化以及各种因素会导致电感、电阻、电容等元器件发生变化,进而导致模型预测性能变差,增大预测误差,降低并网控制精度,提高谐波含量。
3、为了解决模型预测控制中电路参数对系统的影响,国内外学者首先提出对传统模型预测进行改进,主要分为基于权重系数校正的模型预测、基于电流误差校正的的模型预测和基于滑模控制的模型预测。再此基础上加入一些辨识方法进行控制,如梯度法、最小二乘法等对参数进行辨识,保证提高系统鲁棒性,其中滑模控制有着能够克服系统不确定性,对干扰和未建模动态具有很强的鲁棒性的优点,被广泛运用,但在达到滑模面的过程中容易产生抖振。并且由于在实际运行过程中电路电感会因为温度、老化以及电流变化等各种原因发生变化,而传统模型预测控制中的电感参数值会一直保持不变,则导致预测电流与实际电流出现偏差,当误差变大就会降低模型预测的准确性,进而增加电流畸变率。因此,找到一种合适的方法对系统控制和参数辨识尤为重要。
技术实现思路
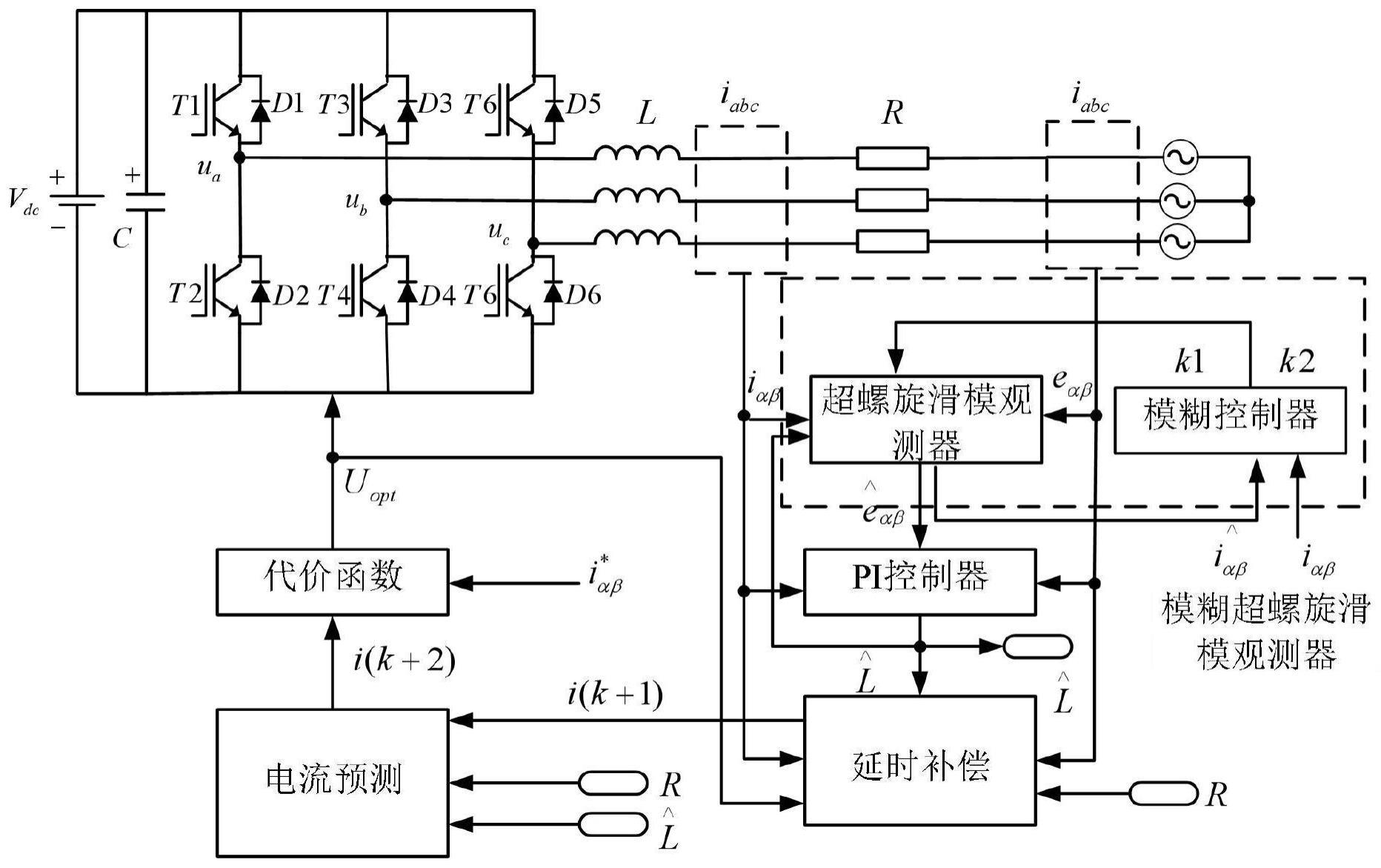
1、发明目的:为了解决现有技术中存在的问题,本发明提供一种基于预测控制条件下的模糊超螺旋滑模观测器电感辨识方法,通过超螺旋滑模观测器对电网电压和输出电流进行观测,考虑到其观测器的增益为固定值,并对系统有一定影响,无法进行自我调节,进一步提出模糊控制的增益自我调节方法,利用观测后的电流与实际电流的误差来实现对增益的调节,最后通过观测后的电网电压与实际电网电压相结合,运用李雅普诺夫定理找到实际电感值,从而达到电感辨识方法。此方法既解决了预测控制电感不匹配问题,又增强了观测器的观测精度,与传统预测控制相对比能提高预测控制的鲁棒性
2、技术方案:本发明通公开了一种基于预测控制条件下的模糊超螺旋滑模观测器电感辨识方法,包括以下步骤:
3、步骤1:通过采样,获得并网逆变器的三相电网电压和输出电流,经过clark变化得到αβ轴分量,将αβ轴的电压和电流通过超螺旋滑模观测器;
4、步骤2:根据步骤1得到的输出电流与实际电流作误差,加入模糊控制形成模糊超螺旋滑模观测器,通过模糊控制得到滑模观测器的增益;
5、步骤3:根据步骤2的增益,再次运行超螺旋滑模观测器得到输出电压;
6、步骤4:根据观测后的电压和实际电网电压相结合,通过pi控制利用李雅普诺夫定理推出实际电感;
7、步骤5:根据步骤4所获得的结果,输入到延时模块、电流预测模块、模糊超螺旋滑模观测器中;
8、步骤6:重复上述步骤再次运行,将电流预测模块输出出来的电流通过代价函数来对并网逆变器进行信号控制。
9、进一步地,所述步骤1中,首先推导出并网逆变器的数学模型:
10、
11、其中,iαβ为输出电流,uαβ为逆变器输出电压,l为滤波电感,r为寄生电阻,eαβ为电网电压。考虑到电网电压为正弦信号,可以得到:
12、
13、其中,w表示为电网的角频率。
14、根据上述公式设计出超螺旋滑模观测器:
15、
16、
17、其中,为观测后的电流,为观测后的电压,k1,k2为观测器增益,sign(.)为符号函数,为观测后的电流与实际电流的误差。
18、进一步地,所述步骤2中,对输出电流与实际电流作误差模糊化,得到滑模观测器的增益具体为:
19、在模糊控制中,采用三角函数,采用2输入1输出的模式,将误差和误差变化量作为模糊控制的输入,其电流误差的论域选取为[-1010],分为{负大,负小,零,正小,正大},分为记为{nb,ns,zo,ps,pb},隶属度函数选择为trimf型。输出滑模增益的论域选取为[20200],输入的模糊语言分为{负大,负小,零,正小,正大},分别记为{ns,s,zo,ps,pb},隶属度函数选择为trimf型,使用mamdani语句控制规则;
20、模糊控制的输入为αβ估计电流与实际电流之差,由于加入了超螺旋算法增加了运算量,因此,在电流误差的论域选取内,模糊控制输入的电流之差在正负5到正负10之间增加滑模增益k1以提升控制速度使之误差变小,反之,当模糊控制的输入电流差在正负5之间应减小滑模增益k1用于控制超调量;同理,当电流差变化率大于50%,提高k1,当电流差变化率小于50%,降低k1使超调平稳;
21、由于超螺旋滑模观测还存在一定的抖振,积分项中k2的取值可以削弱抖振,并且k2的取值取决于扰动上界,当大于实际电流的5%时,提高k2的值,反之,小于实际电流的5%,减小k2的值。
22、进一步地,所述步骤3,根据超螺旋滑模观测器的公式和并网逆变器数学模型做误差可得:
23、
24、
25、其中,与表示观测后的电网电压和输出电流与实际值之间的误差。
26、当电流误差收敛到0,即则得到:
27、
28、进一步地,所述步骤4,由于模糊超螺旋滑模观测器中的电感与实际电感不同,因此,对观测器数学模型重新定义为:
29、
30、
31、其中,为实际电感值,电流误差收敛到0,即则可以得到:
32、
33、根据电感误差对超螺旋滑模观测器的影响,进一步可以得到:
34、
35、从公式中看出,电感误差与为线性关系
36、利用李雅普诺夫函数v推出:
37、
38、又因为k1>0,对v进行求导,为满足电感辨识方法的稳定性推出:
39、
40、为了方便计算,可以简化为
41、
42、其中,k2>0,将上述公式相等再次化简可得:
43、
44、再次积分可得:
45、
46、满足于:
47、kp=k1w(iαβ×eαβ)
48、ki=k2w(iαβ×eαβ)
49、因此可以最后得到实际电感值:
50、
51、其中,l0表示为初始电感,kp,ki表示pi控制器中的比例系数和积分系数。
52、进一步,所述步骤5,结合步骤4所获得的结果,输入到延时模块、电流预测模块、模糊超螺旋滑模观测器中;
53、首先推导出并网逆变器的离散数学模型,可得:
54、
55、其中,ts为采样周期,eαβ(k)为第k时刻电网电压在αβ坐标下的分量,iαβ(k)为第k时刻输出电流在αβ坐标下的分量,uαβ(k)为第k时刻逆变器输出电压在αβ坐标下的分量。
56、由于在传统模型预测控制,在测量的瞬间都会有固定延时,这种延时会增加电流纹波,因此使用延时补偿,使用iαβ(k+1)来计算。
57、通过电流预测,使用iαβ(k+1)来预测iαβ(k+2)时刻可得:
58、
59、其中,表示实际电感,iαβ(k+1)为第k+1时刻输出电流在αβ坐标下的分量,iαβ(k+2)为第k+2时刻输出电流在αβ坐标下的分量
60、进一步,所述步骤6,根据步骤5iαβ(k+2)的结果输入到代价函数uopt中。
61、因为采样频率通常远高于电网电压,所以假设
62、eαβ(k+1)=eαβ(k)
63、其代价函数uopt为:
64、
65、其中,为参考电流值,iαβ(k+2)为第k+2时刻的电流值。最后通过代价函数来对并网逆变器进行信号控制。
66、有益效果:
67、1.本发明首先加入超螺旋滑模观测器对电网电压和输出电流进行观测,其算法简单,响应快,对外界噪声和参数设动具有鲁棒性,提高了并网系统预测控制的准确性。
68、2.本发明加入模糊控制形成模糊超螺旋滑模观测器,能够根据电流误差来自我调节滑模增益,提高了观测器的精度,增加了系统稳定性及鲁棒性。
69、3.本发明从模糊超螺旋滑模观测器出发,将观测后的的电网电压与实际电网电压相结合,通过李雅普诺夫定理推出实际电感,解决了电感参数不匹配问题,避免并网预测系统电感参数不匹配时,对系统预测控制的影响,提高了系统预测控制的精确性。
- 还没有人留言评论。精彩留言会获得点赞!