一种基于自适应协同控制的虚拟同步发电机预同步控制方法
本发明涉及电力电子变流器控制,尤其是一种基于自适应协同控制的虚拟同步发电机预同步控制方法。
背景技术:
1、随着科技的不断进步,光伏、风能等新能源发电即将成为未来电力系统中的重要支柱,但伴随着大量的分布式电源采用电力电子变流器接入电网,由于其缺乏惯性和阻尼,削弱了电力系统的振荡能力,对电力系统产生了不容忽视的影响。虚拟同步发电机(virtual synchronous generator,vsg)控制的储能变流器通过模拟同步发电机的外特性为分布式电源并网提供了惯性和阻尼支撑,vsg控制可以主动控制频率和电压,既能在离网模式下独立带负载运行,又能并网运行,但当其运行模式从离网向并网切换时,由于储能变流器输出电压与电网电压的幅值、相位和频率不一致,而产生较大的冲击电流,因此亟需在并网前采取预同步控制,使得储能变流器能够在离网和并网两种运行模式下平滑切换。
2、针对上述问题,有的学者提出比例积分(pi)控制的预同步方法,即在离网模式下分别检测变流器输出电压与电网电压的幅值差值、相位差值和频率差值,通过pi控制实现幅值、相位和频率的无差控制,但采用传统的pi控制存在控制精度较差的问题,预同步控制后依旧存在较大的电流冲击。还有学者提出虚拟功率的预同步方法,即把相角差转化为虚拟功率以保证相位差控制器调节更加精准连续,但该方法无法使用虚拟功率的方法进行变流器输出电压与电网电压幅值差的调节,且无法解决频率差和相位差耦合的问题。
3、协同控制理论是协同学在控制领域中的应用,其核心思想为定向自组织原理。定向自组织原理是指在满足耗散结构的系统中,通过协同控制理论设计协同控制器,再藉由协同控制器使系统各状态变量相互协作,同时藉由系统达到平衡状态的动态演化方程的设计,实现系统控制目标。协同控制结构简单且相较于传统的线性控制器其控制性能更佳,近年也逐渐在微网变流器控制中获得了研究关注。有学者将协同控制应用于vsg控制,提高其暂态稳定性;亦有学者将直接功率控制与协同控制结合起来,实现功率的精准控制。因此,本发明将协同控制应用于vsg预同步控制,消除vsg并网前并网点两端的电压幅值差、频率差及相位差而实现平滑并网。
技术实现思路
1、本发明目的为解决现有的vsg预同步控制精度低、且无法解决预同步过程中频率差和相位差耦合问题的缺陷,本发明的目的在于提供一种依据频率变化自适应调节协同控制权重以改善预同步过程中频率稳定性,且控制精准可靠,简单实用的基于自适应协同控制的虚拟同步发电机预同步控制方法。
2、为实现上述目的,本发明采用了以下技术方案:一种基于自适应协同控制的虚拟同步发电机预同步控制方法,该方法包括下列顺序的步骤:
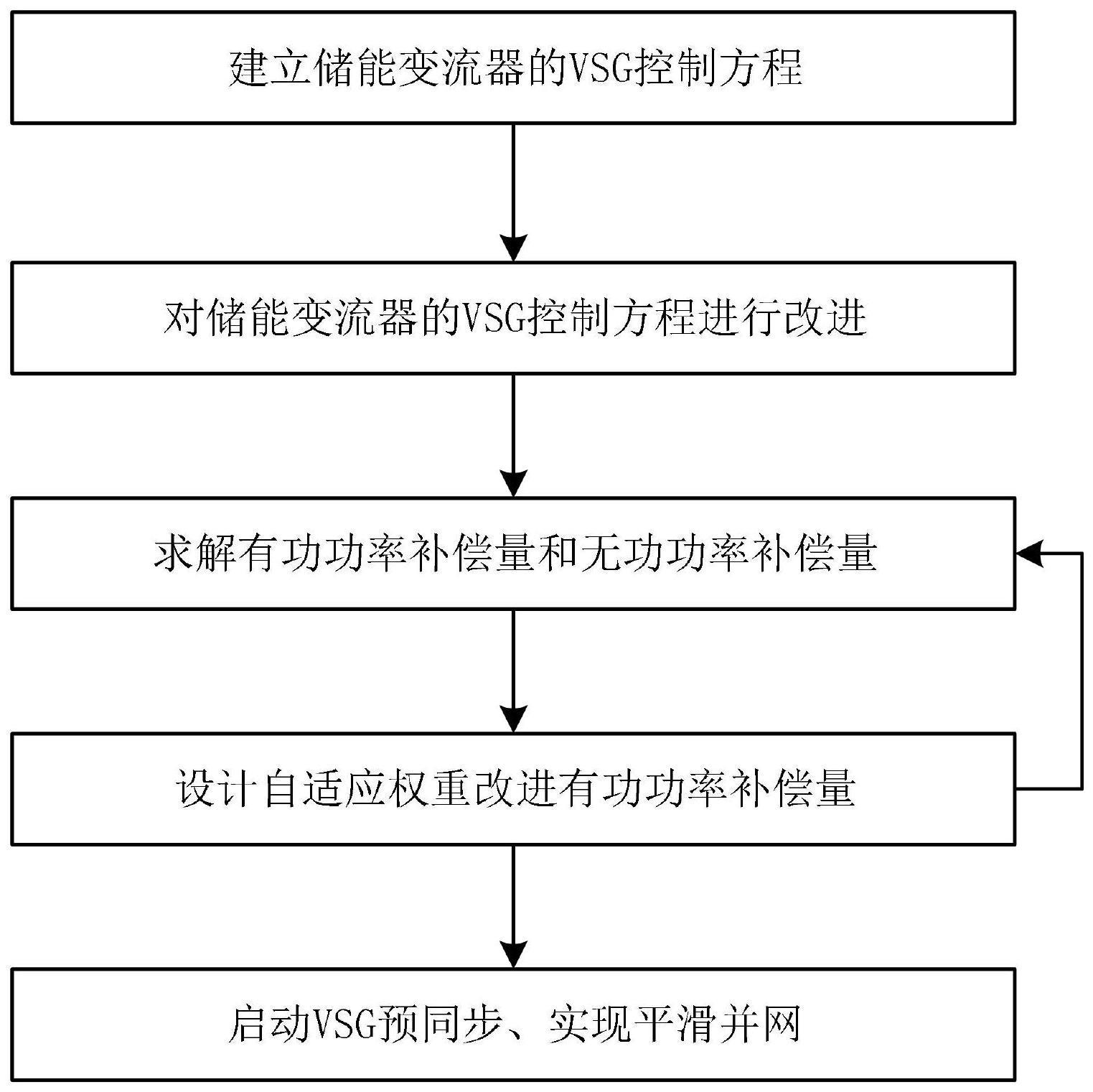
3、(1)基于储能变流器的额定有功功率和额定无功功率,储能变流器输出角频率和电压幅值给定值,建立储能变流器的vsg控制方程;
4、(2)对储能变流器的vsg控制方程进行改进:在储能变流器的vsg控制方程中增加有功功率补偿器和无功功率补偿器,得到改进后的vsg控制方程;
5、(3)设计有功功率补偿器和无功功率补偿器:将并网点两侧的电压幅值、角频率和相位差作为控制目标,基于协同控制理论求解有功功率补偿器的补偿值和无功功率补偿器的补偿值;
6、(4)设计自适应权重改进有功功率补偿器;
7、(5)启动vsg预同步、实现平滑并网:在离网模式下将储能变流器输出功率、输出电压幅值和角频率参考值作为有功功率补偿器和无功功率补偿器的输入,经协同控制生成储能变流器输出有功功率补偿器和无功功率补偿器的补偿值,即启动预同步既而实现平滑并网。
8、在步骤(1)中,所述建立储能变流器的vsg控制方程为:
9、
10、式中,pref、qref分别为额定有功功率和额定无功功率,pe、qe分别为vsg的输出有功功率和无功功率,dp、dq分别为有功下垂系数和无功下垂系数,j和k分别为虚拟转动惯量和虚拟时间常数,ω和u分别为vsg输出电压的角频率和幅值,θ为vsg输出电压相位,ωn为vsg输出电压的额定角频率,un分别为vsg输出电压的额定电压幅值。
11、所述步骤(2)具体是指:在储能变流器的vsg控制方程的有功控制环中增加有功功率补偿器,在储能变流器的vsg控制方程的无功控制环中增加无功功率补偿器:
12、
13、式中,pref、qref分别为额定有功功率和额定无功功率,pe、qe分别为vsg的输出有功功率和无功功率,dp、dq分别为有功下垂系数和无功下垂系数,j和k分别为虚拟转动惯量和虚拟时间常数,ω和u分别为vsg输出电压的角频率和幅值,θ为vsg输出电压相位,ωn为vsg输出电压的额定角频率,un分别为vsg输出电压的额定电压幅值,δp为有功功率补偿器,δq为无功功率补偿器。
14、所述步骤(3)具体包括以下步骤:
15、(3a)求解有功功率补偿器的补偿值:为保证并网瞬间vsg输出侧与网侧电压相位和频率保持一致,将vsg输出侧与网侧电压相位差和角频率差的线性组合作为宏变量:
16、ψp=(θ-θg)+k(ω-ωg) (3)
17、式中,θg、ωg分别为网侧电压相位、网侧电压角频率,θ为vsg输出电压相位,k为权重因子参数,用于描述相位差与角频率差的取值关系;ω为vsg输出电压的角频率;
18、基于协同控制理论,为使控制系统状态变量沿某一路径收敛在流行ψp=0上,动态演化方程设计为:
19、
20、式中,tp为有功控制环收敛时间参数,表示有功控制环中状态变量经过动态演化方程收敛到流形的时间,tp>0;
21、将式(3)代入式(4)可得:
22、
23、又已知功角δ有:
24、δ=θ-θg=∫(ω-ωg) (6)
25、结合式(5)、式(6)和式(2)得到预同步的有功功率补偿器的δp补偿值:
26、
27、式中,pe为vsg的输出有功功率,pref为额定有功功率,ωn为vsg输出电压的额定角频率,j为虚拟转动惯量,dp为有功下垂系数;
28、(3b)求解无功功率补偿器的补偿值:为保证并网瞬间vsg输出侧与网侧电压幅值保持一致,将vsg输出侧与网侧电压幅值差作为宏变量:
29、ψq=u-ug (8)
30、式中,ug为网侧电压幅值,u为vsg输出电压的幅值,同理有功控制环,动态演化方程设计为:
31、
32、式中,tq为无功控制环收敛时间参数,表示有功控制环中状态变量经过动态演化方程收敛到流形的时间,tq>0;
33、结合式(10)、式(11)和式(2),在预同步期间将vsg输出的额定电压幅值un切换成网侧电压幅值ug得到预同步的无功功率补偿器δq的补偿值:
34、
35、式中,qe为vsg的输出无功功率,qref为额定无功功率,u为vsg输出电压的幅值,k为虚拟时间常数,dq为无功下垂系数。
36、所述步骤(4)具体是指:引入角频率变化量,设计自适应权重因子k:
37、
38、式中,k0为权重因子初值,kω为权重因子调整系数;
39、当角频率差较大时,自适应权重因子k会相应较大,有利于频率稳定;
40、当角频率差较小时,自适应权重因子k会相应较小,加快了预同步动态;预同步期间将vsg输出电压的额定角频率ωn切换成网侧电压角频率ωg,结合式(7)和式(11)得到增加自适应权重因子后的有功功率补偿器δp的补偿值:
41、
42、式中,pe为vsg的输出有功功率,pref为额定有功功率,ω为vsg输出电压的角频率,j为虚拟转动惯量,dp为有功下垂系数,k0为权重因子初值,kω为权重因子调整系数,tp为有功控制环收敛时间参数。
43、由上述技术方案可知,本发明的有益效果为:第一,基于协同控制理论设计补偿器,能够使得vsg输出侧与网侧电压幅值差、相位差、频率差收敛于流形,精准消除并网点两侧电压幅值差、相位差、频率差继而实现平滑并网;第二,在协同控制中将权重因子设计成自适应的权重因子,能够有效改善预同步控制过程中因相位差和频率差的耦合关系而引起的频率冲击。
- 还没有人留言评论。精彩留言会获得点赞!