一种异步电机模型定子电流、磁链预测方法及装置与流程
本发明涉及交流异步电机,具体涉及一种异步电机模型定子电流、磁链预测方法及装置。
背景技术:
1、交流异步电机凭借低成本、质量小、易操作、结构简易、运行可靠、易于维护、能够用于易燃易爆等恶劣环境等优点,在工业领域受到广泛青睐。目前,异步电机应用较为广泛的控制方法主要包括以下三类:恒压频比控制(v/f)、矢量控制(vc)、直接转矩控制(dtc)。由于vc稳态精度高,dtc动态性能良好,因此两者常被用于异步电机交流变频调速控制领域。但是,为了可同时获取更为优异的动稳态控制效果,近年来,一种新型控制方法应运而生,即模型预测转矩控制(model predictive torque control,mptc)。
2、mptc作为一种新型非线性控制方法,定子电流和定子磁链估计和预测准确性直接决定控制系统的控制性能,其利用的是电机控制器的离散特性,且该控制器开关状态数量有限,因此,mptc仅预测有限的开关状态,并且,存在观测不准确和鲁棒性较差等问题。
技术实现思路
1、有鉴于此,本发明实施例提供了一种异步电机模型定子电流、磁链预测方法及装置,解决了由于现有技术仅预测有限的开关状态,并且存在观测不准确和鲁棒性较差等问题。
2、根据第一方面,本发明实施例提供了一种异步电机模型定子电流、磁链预测方法,包括:
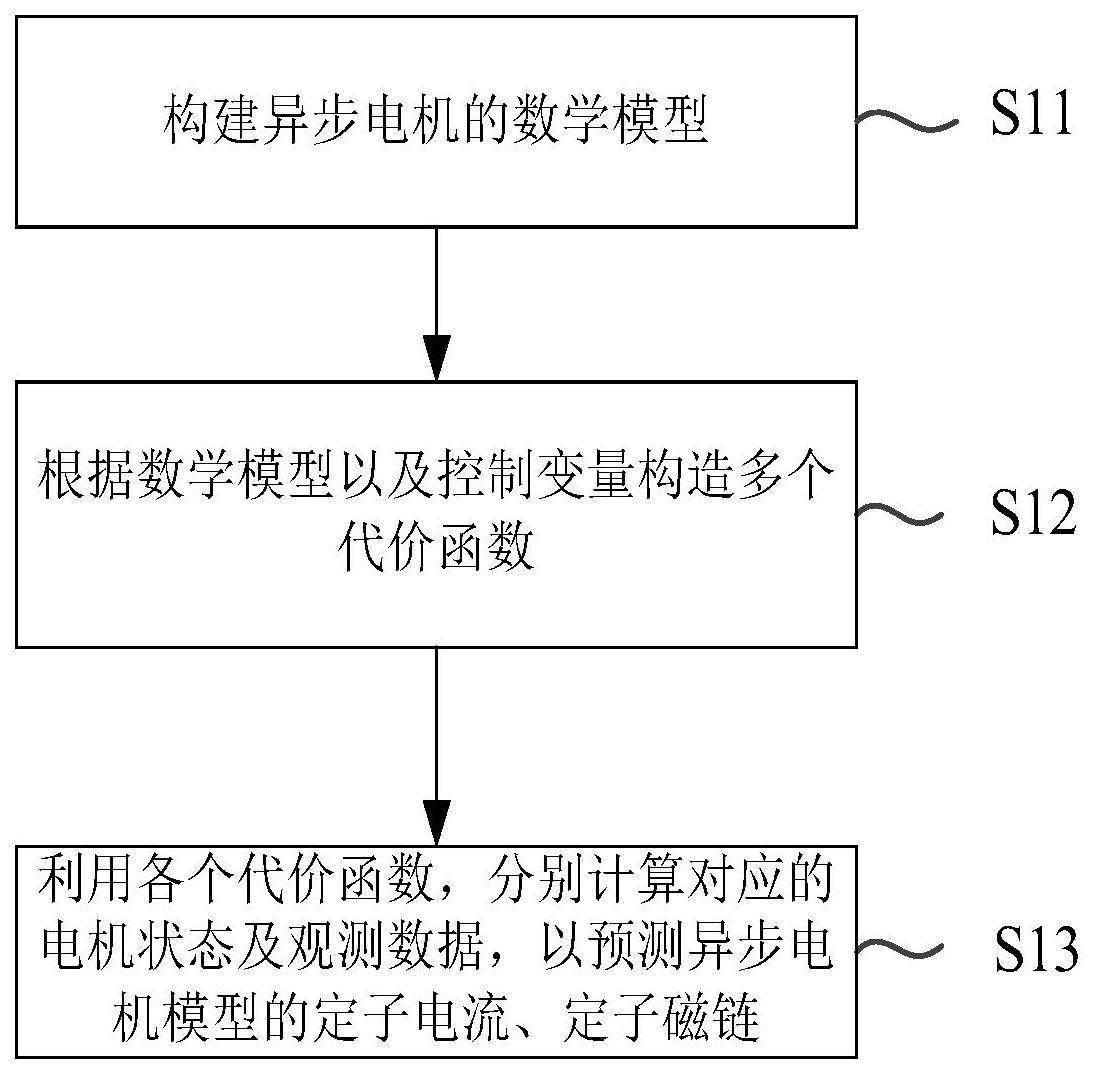
3、构建异步电机的数学模型;
4、根据所述数学模型以及控制变量构造多个代价函数;
5、利用各个所述代价函数,分别计算对应的电机状态及观测数据,以预测所述异步电机模型的定子电流、定子磁链。
6、本发明实施例提供的异步电机模型定子电流、磁链预测方法,通过构建异步电机的数学模型对定子电流、磁链进行预测,确保控制系统的控制性能,用来准确观测和预测定子电流和定子磁链,进一步提升模型预测转矩控制的控制效果。
7、结合第一方面,在第一方面第一实施方式中,所述构建异步电机的数学模型,包括:
8、获取所述异步电机的基础数据;
9、利用所述基础数据,构建所述异步电机在两相静止坐标系下的电机模型以及状态空间模型。
10、结合第一方面第一实施方式,在第一方面第二实施方式中,通过以下公式表示所述异步电机在两相静止坐标系下的所述电机模型:
11、
12、
13、ψs=lsis+lmir
14、ψr=lrir+lmis
15、
16、其中,us为定子电压矢量,rs为定子电阻,is为定子电流矢量,ψs为定子磁链矢量,rr为转子电阻,ir为转子电流矢量,ψr为转子磁链矢量,lr为转子电感,j为转动惯量,ls为定子电感,lm为互感,te为电磁转矩,tl为负载转矩,ωr为电角速度,np为极对数;
17、通过以下公式表示所述异步电机在两相静止坐标系下的所述状态空间模型:
18、
19、
20、
21、其中,a为系统矩阵,b为控制矩阵,x为状态向量,u为输入向量,为漏磁系数,为转子时间常数;
22、
23、x=[isa isβ ψsα ψsg]t
24、u=[usa usβ]t
25、其中,isα为定子电流α分量,isβ为定子电流β轴分量,ψsα为定子磁链α分量,ψsβ为定子磁链β轴分量,usα为定子电压α分量,usβ为定子电压β轴分量。
26、结合第一方面第二实施方式,在第一方面第三实施方式中,所述根据数学模型以及控制变量构造多个代价函数,包括:
27、根据数学模型以及控制变量构造自适应观测器函数;
28、根据数学模型以及所述自适应观测器函数,构造误差方程;
29、通过以下公式表示所述自适应观测器函数:
30、
31、其中,为x的估计值,为的导数,g为增益矩阵,为定子电流α分量估计值与实际值之差,为定子电流β轴分量估计值与实际值之差,为定子磁链α分量估计值与实际值之差,为定子磁链β轴分量估计值与实际值之差,为定子电流α分量估计值,为定子电流β轴分量估计值,为定子磁链α分量估计值,为定子磁链β轴分量估计值,m为系数反馈矩阵sgn(x)为符号函数,m1和m2是滑模反馈系数,c为观测矩阵,y为输出向量,y=[isα isβ ψsα ψsβ]t;
32、通过以下公式表示所述误差方程:
33、
34、结合第一方面第三实施方式,在第一方面第四实施方式中,在所述根据数学模型以及控制变量构造多个代价函数之后,所述方法还包括:对所述自适应观测器函数进行更新,其中,
35、利用广义滑膜可达性条件以及所述误差方程,确定调整函数
36、根据所述调整函数对所述自适应观测器函数进行更新,确定目标观测器函数。
37、结合第一方面第四实施方式,在第一方面第五实施方式中,
38、
39、
40、其中,tanh()为双曲正切函数,
41、
42、通过以下公式表示所述目标观测器:
43、
44、结合第一方面第五实施方式,在第一方面第六实施方式中,所述利用各个所述代价函数,分别计算对应的电机状态及观测数据,以预测所述异步电机模型的定子电流、定子磁链,包括:
45、根据所述目标观测器计算每个电压矢量对定子磁链、定子电流和电磁转矩;
46、ψs(k+2)=ψs(k+1)+ts(us(k+1)-rsis(k+1))
47、其中,ψs(k+2)为k+2时刻的定子磁链,ψs(k+1)为k+1时刻的定子磁链,ts为采样周期;
48、
49、其中,is(k+2)为k+2时刻的定子电流;
50、te(k+2)=1.5np·ψs(k+2)×is(k+2)
51、其中,te(k+2)为k+2时刻的电磁转矩。
52、本发明实施例提供的异步电机模型定子电流、磁链预测方法,通过构建异步电机的数学模型对定子电流、磁链进行预测,确保控制系统的控制性能,用来准确观测和预测定子电流和定子磁链,进一步提升模型预测转矩控制的控制效果。
53、根据第二方面,本发明实施例提供的异步电机模型定子电流、磁链预测装置,包括:
54、第一处理模块,用于构建异步电机的数学模型;
55、第二处理模块,用于根据数学模型以及控制变量构造多个代价函数;
56、第三处理模块,用于利用各个所述代价函数,分别计算对应的电机状态及观测数据,以预测所述异步电机模型的定子电流、定子磁链。
57、本实施例提供的异步电机模型定子电流、磁链预测装置,通过构建异步电机的数学模型对定子电流、磁链进行预测,确保控制系统的控制性能,用来准确观测和预测定子电流和定子磁链,进一步提升模型预测转矩控制的控制效果。
58、根据第三方面,本发明实施例提供了一种电子设备,包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行第一方面或者第一方面的任意一种实施方式中所述的异步电机模型定子电流、磁链预测方法。
59、根据第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行第一方面或者第一方面的任意一种实施方式中所述的异步电机模型定子电流、磁链预测方法。
- 还没有人留言评论。精彩留言会获得点赞!