伺服马达控制方法及伺服马达控制装置与流程
本发明涉及用于机床的数值控制(nc:numerical control)等的伺服马达控制方法及伺服马达控制装置。
背景技术:
1、在机床的数值控制中,根据数值控制程序(加工程序),对机床的每个轴产生使该轴的马达移动一定的微小量的指令脉冲,根据该指令脉冲进行马达的伺服控制。在指令脉冲中存在使马达向正方向旋转的指令脉冲和使马达向负方向(也称为反方向)旋转的指令脉冲,从使马达向正方向旋转的指令脉冲的累计值中减去使马达向负方向旋转的指令脉冲的累计值后的值表示伺服控制中的对马达的当前的位置指令。在使马达向一个方向旋转的情况下,马达的速度与每单位时间输入的指令脉冲数成比例。
2、将工具或工件称为对象物,在数值控制中使用的指令脉冲中有时包含使对象物的移动速度骤变的部分。对象物的移动速度的骤变会给机床带来机械冲击,因此不优选。在这种情况下,对指令脉冲进行修正,以使急剧的速度变化成为平稳的速度变化。例如,专利文献1公开了如下内容:从指令脉冲中检测使对象物的移动速度骤变的部分,确定包含速度骤变部分的脉冲校正区间,仅在脉冲校正区间进行校正,以使速度的变化变得缓慢。另外,在数值控制中,在对象物的移动路径中包含拐角点的情况下,在拐角点的前后进行速度的加减速控制。专利文献2公开了一种数值控制装置,即使在加工程序的执行中变更时间常数,也能够在拐角点的前后适当地进行加减速控制。
3、专利文献3公开了:为了抑制在根据进给轴指令驱动机床时产生的振动,在从速度0向正方向加速到第一速度的期间、从第一速度减速到速度0的期间、从速度0向反方向加速到第二速度的期间、以及从第二速度减速到速度0的期间连续时,使这四个期间中的两个期间的长度相互相同,使剩余的两个期间的长度也相互相同。专利文献4公开了在进行机床的数值控制时,为了防止移动时间的浪费,合成连续的两个移动指令。
4、通常,马达的最大旋转速度是确定的。在进行数值控制的情况下,在由输入的指令脉冲决定的马达的旋转速度超过最大速度时,不能以这样的速度使马达旋转,所以以往忽略了这样的指令脉冲。但是,如果忽略指令脉冲,则工具或工件等对象物的位置会偏离用户所希望的位置。专利文献5公开了为了抑制这种位置偏移的发生,在输入了超过最大速度的指令时使马达以最大速度旋转,并且在指令中保存超过最大速度的部分并与下一个控制周期的指令值相加。
5、[现有技术文献]
6、[专利文献]
7、专利文献1:日本专利第5336217号公报
8、专利文献2:日本专利第5573664号公报
9、专利文献3:日本特开2021-71895号公报
10、专利文献4:日本专利第5413085号公报
11、专利文献5:日本特开2003-202912号公报
技术实现思路
1、在专利文献5所记载的方法中,如果是使马达仅向一个方向旋转的情况,则即使在输入了超过马达的最大速度的指令的情况下,最终也能够使工具或工件的位置成为用户最初想要的位置。然而,用户的意图不仅包括对象的最终位置,还包括给予怎样的速度变化以将对象移动到指定的位置。在专利文献5所记载的方法中,关于给予怎样的速度变化,并不一定可反映出用户的意图。
2、本发明的目的在于提供一种伺服马达控制方法及伺服马达控制装置,即使在输入超过马达的最大速度的指令时,也能够尽可能忠实于生成该指令的用户的意图地进行马达的位置或速度变化的控制。
3、根据本发明的一个方式,提供一种伺服马达控制方法,被输入指令以规定的微小移动量移动的指令脉冲,并基于指令脉冲进行马达的伺服控制,该伺服马达控制方法具有:存储步骤,该存储步骤中将从速度0到马达的最大速度为止的范围分割为多个速度区域,按每个速度区域将过去输入的指令脉冲下的加速度的平均值作为平均加速度存储在加速度表中;速度限制步骤,该速度限制步骤中在由指令脉冲决定的速度超过指定的极限值时,将超过极限值的部分的指令脉冲储存在缓冲器中,并与在下一控制周期中输入的指令脉冲相加,由此将马达的速度限制在极限值以内;以及速度变化步骤,该速度变化步骤中从加速度表中读出与在速度限制步骤中被限制的速度对应的速度区域的平均加速度,使用读出的平均加速度使被限制在极限值以内的速度变化。
4、在一个方式的伺服马达控制方法中,根据过去输入的指令脉冲按每个速度区域求出平均加速度并存储在加速度表中,在根据极限值进行了速度限制时,根据速度限制后的指令脉冲所表示的速度从加速度表中读出平均加速度,根据读出的平均加速度使速度限制后的速度变化,因此能够以用户所希望的速度变化对马达进行伺服控制。
5、在一个方式中,优选加速度的平均值是加速度的移动平均值。通过使用移动平均值,即使在长期间内用户所希望的速度变化发生了变化的情况下,也能够以被认为符合该时刻的用户意图的速度变化来进行马达的伺服控制。另外,极限值可以是马达的额定最大速度,也可以是在额定最大速度的范围内由用户决定的最大速度。这样,通过使得能够设定极限值,从而能够按照用户的意图灵活地进行伺服控制。此外,在速度变化步骤中,当储存在缓冲器中的指令脉冲的数量超过阈值时,可以不进行使用了平均加速度的速度变更。通过这样的配置,可以容易地到达由指令脉冲指示的位置,而不会超程。
6、在一个方式中,指令脉冲可以由使马达向正方向旋转的正方向脉冲和使马达向负方向旋转的负方向脉冲构成,缓冲器可以由储存正方向脉冲的数量的正方向缓冲器和储存负方向脉冲的数量的负方向缓冲器构成。通过设置正方向缓冲器和负方向缓冲器这两者,容易应对马达向正方向和负方向这两方旋转的情形。在这种情况下,可以在向正方向驱动马达且负方向缓冲器的值为正时忽略所输入的正方向脉冲,在向负方向驱动马达且正方向缓冲器的值为正时忽略所输入的负方向脉冲。在这样忽略指令脉冲的情况下,在使马达往复移动时,至少对于最初的一次,能够可靠地到达由指令脉冲所希望的位置。另外,也可以根据需要进一步追加缓冲器。
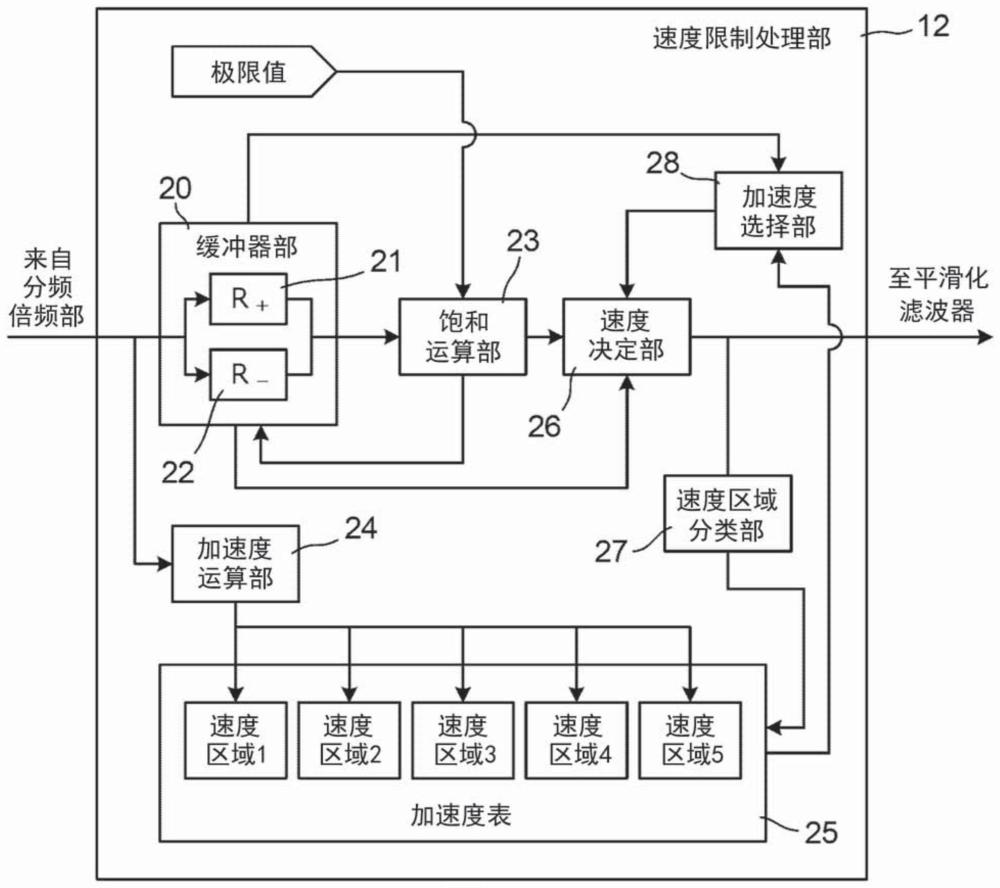
7、根据本发明的另一方式,提供一种伺服马达控制装置,被输入指令以规定的微小移动量进行移动的指令脉冲,并基于指令脉冲进行马达的伺服控制,该伺服马达控制装置具有:加速度表,该加速度表将从速度0到马达的最大速度为止的范围分割为多个速度区域,并按每个速度区域将加速度的平均值作为平均加速度进行存储;加速度运算部,该加速度运算部对输入的指令脉冲进行分析,计算出该指令脉冲所表示的速度和加速度,求出每个速度区域的平均加速度并存储在加速度表中;缓冲器部,该缓冲器部储存指令脉冲的数量;饱和运算部,该饱和运算部在由指令脉冲决定的速度超过指定的极限值时,将超过极限值的部分的指令脉冲储存在缓冲器部中,并与在下一个控制周期中输入的指令脉冲相加,由此将马达的速度限制在极限值以内;以及速度变化单元,该速度变化单元从加速度表中读出与被限制在极限值以内的速度对应的速度区域的平均加速度,并使用读出的平均加速度使被限制在极限值以内的速度变化。
8、在另一方式的伺服马达控制装置中,在设置了存储根据过去输入的指令脉冲按每个速度区域计算出的平均加速度的加速度表、和基于极限值对按每个控制周期输入的指令脉冲进行速度限制的饱和运算部的基础上,通过速度变化单元,对于被限制在极限值以内的速度,根据基于该速度所属的速度区域从加速度表读出的平均加速度施加变化,因此能够以用户希望的速度变化对马达进行伺服控制。
9、在伺服马达控制装置中,优选加速度的平均值是加速度的移动平均值。通过使用移动平均值,即使在长期间内用户所希望的速度变化发生了变化的情况下,也能够以被认为符合该时刻的用户意图的速度变化来进行马达的伺服控制。另外,极限值可以是马达的额定最大速度,也可以是在额定最大速度的范围内由用户决定的最大速度。这样,通过使得能够设定极限值,从而能够按照用户的意图灵活地进行伺服控制。
10、在伺服马达控制装置中,速度变化单元也可以具备:速度区域分类部,该速度区域分类部判别与速度变化单元要输出的指令脉冲所表示的速度对应的速度区域;加速度选择部,该加速度选择部输入基于由速度区域分类部判别的速度区域来检索加速度表而得到的平均加速度,进行加速度的选择;以及速度决定部,该速度决定部对饱和运算部输出的指令脉冲施加变更,以使速度根据加速度选择部中所选择的加速度而变化,加速度选择部也可以在储存于缓冲器部的指令脉冲的数量超过阈值时选择0作为加速度,如果储存于缓冲器部的指令脉冲的数量为阈值则选择从加速度表得到的平均加速度作为加速度。通过这样的配置,可以容易地到达由指令脉冲指示的位置,而不会超程。
11、在伺服马达控制装置中,指令脉冲也可以由使马达向正方向旋转的正方向脉冲和使马达向负方向旋转的负方向脉冲构成,缓冲器部也可以具备储存正方向脉冲的数量的正方向缓冲器和储存负方向脉冲的数量的负方向缓冲器。通过设置正方向缓冲器和负方向缓冲器这两者,容易应对马达向正方向和负方向这两方旋转的情形。在这种情况下,可以在向正方向驱动马达且负方向缓冲器的值为正时忽略所输入的正方向脉冲,在向负方向驱动马达且正方向缓冲器的值为正时忽略所输入的负方向脉冲。在这样忽略指令脉冲的情况下,在使马达往复移动时,至少对于最初的一次,能够可靠地到达由指令脉冲所希望的位置。另外,也可以根据需要进一步追加缓冲器。
12、根据本发明的方式,即使在输入超过马达的最大速度的指令时,也能够尽可能忠实于生成该指令的用户意图地进行马达的位置和速度变化的控制。
- 还没有人留言评论。精彩留言会获得点赞!