基于谐波相序的电流拍频抑制器、系统及方法与流程
本发明涉及逆变控制,特别涉及一种基于谐波相序的电流拍频抑制器、系统及方法。
背景技术:
1、常用的三相或单相变流器装置,通过在直流母线电压平滑电路中设置大容值的电解电容来对经过不控整流产生的电压脉动进行平滑处理。但是,采用大容值的电解电容不仅使得成本和体积增加,还由于电解电容中电解液会随时间推移发生泄露、蒸发或化学变化,进而导致电容损坏。这个缺陷往往成为变流器的薄弱环节,据统计变流器电路故障中有60%是因电解电容所引起的。
2、采用小容值的薄膜电容,不仅可以有效降低成本和体积,而且薄膜电容寿命长且耐压能力高,目前已成为替代电解电容的有效解决方案。但是,由于小容值薄膜电容不具有稳压作用,使得直流母线电压发生脉动,变流器输出三相电流中会产生因直流母线电压脉动引起的两种电流谐波,当这两种电流谐波频率不是电机运行频率的整数倍时,会引起电流的拍频现象。特别的,当三相50hz电网电压输入到变流器时,直流母线电压上会存在300hz及其倍数的脉动电压分量,使得三相电流中产生了两种电流谐波f+300、|f-300|(单位为hz);其中,f为电机运行电频率。当两种电流谐波f+300、|f-300|不是f的整数倍时,就会导致电流拍频现象。
3、现有技术中,主要从问题源头(直流母线电压脉动分量)出发,或通过计算直流母线电压脉动分量的相位来使得直流电压中包含的脉动成分的d轴电压ud比q轴电压uq相位超前90°,或通过补偿计算直流母线电压脉动分量的延迟来获得修正的母线电压指令。但是,现有技术较少从问题的结果(电流拍频相关电流谐波幅值)出发进行电流拍频现象的抑制,使得最终的电流拍频抑制效果不显著。
技术实现思路
1、本发明主要解决的技术问题是提供一种基于谐波相序的电流拍频抑制器、系统及方法,实现电流拍频现象的有效抑制。
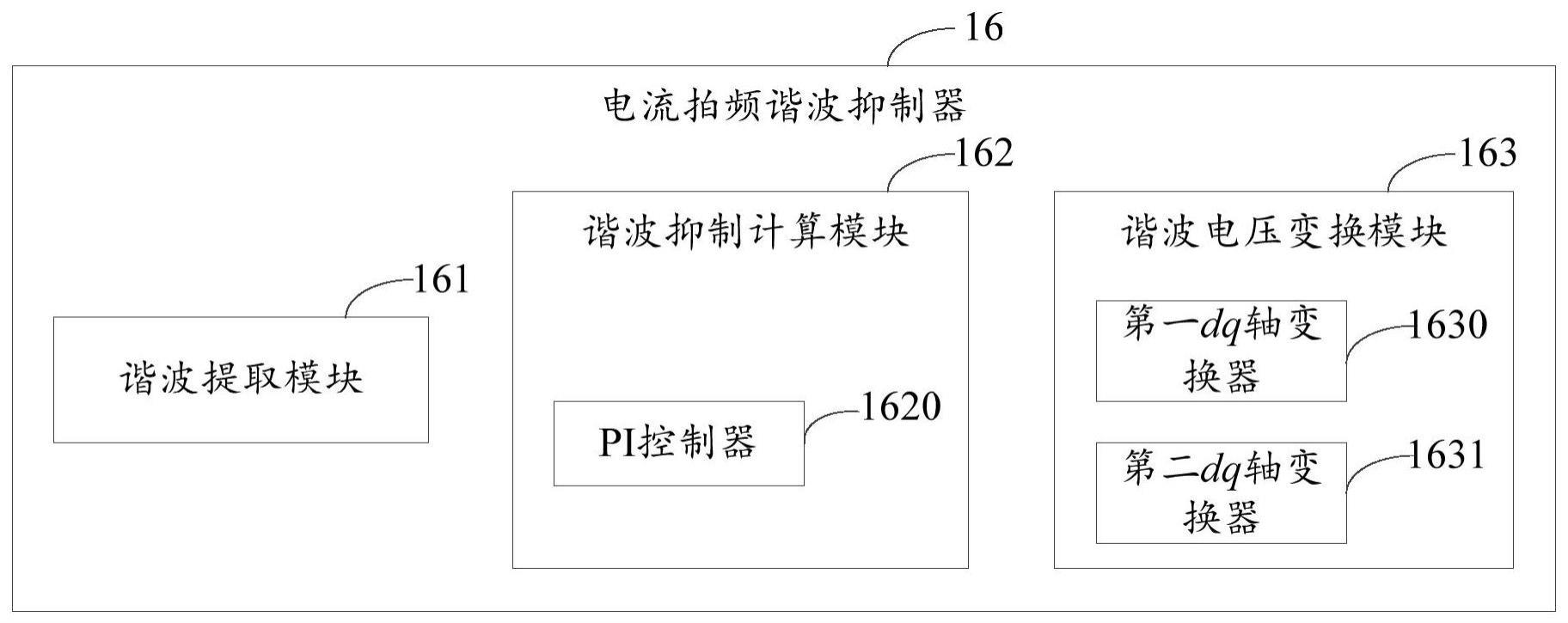
2、为解决上述技术问题,本发明采用的一个技术方案是:提供一种基于谐波相序的电流拍频抑制器,包括:谐波提取模块,用于:预先根据电流拍频相关的两种电流谐波f+2*m*k*fg、|f-2*m*k*fg|在不同运行电频率下的相序特性,在dq轴系中设计与所述两种电流谐波旋转角速度相等且方向一致的dq(f+2*m*k*fg)、dq|f-2*m*k*fg|同步旋转坐标系;以及利用abc/dq(f+2*m*k*fg)、abc/dq|f-2*m*k*fg|变换和低通滤波器从三相电流中提取得到所述两种电流谐波f+2*m*k*fg、|f-2*m*k*fg|的特征直流分量;其中,f为电机运行电频率,m为变流器输入相数,fg为电网频率,k为直流母线电压主要脉动频率的倍数,取值为正整数;谐波抑制计算模块,用于通过pi控制器对所述特征直流分量进行目标值为0的抑制控制,以对所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值抑制控制,并输出抑制所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值所需的位于dq(f+2*m*k*fg)、dq|f-2*m*k*fg|轴上电压补偿信号;谐波电压变换模块,用于:对所述电压补偿信号进行dq(f+2*m*k*fg)/dq、dq|f-2*m*k*fg|/dq轴变换处理,以分别得到在d轴、q轴的等效电压补偿量;分别将d轴、q轴的等效电压补偿量对应叠加计算,以得到在d轴、q轴的等效电压补偿信号udb、uqb;以及将所述等效电压补偿信号udb、uqb以补偿信号分别对应输出至电流环pi控制器的输出ud、uq中进行补偿计算得到ud*、uq*,并经过dq/αβ变换处理得到uα*、uβ*,最后输出至pwm控制器,使所述pwm控制器控制pwm信号以实现所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的谐波幅值的抑制,从而实现电流拍频的抑制。
3、其中,所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|在不同运行电频率下的相序特性,包括:所述电流谐波f+2*m*k*fg的相序为正序;所述电流谐波|f-2*m*k*fg|的相序与电机运行电频率f相关,具体为:
4、当f<2*m*k*fg时,所述电流谐波|f-2*m*k*fg|的相序为负序;当f=2*m*k*fg时,不存在所述电流谐波|f-2*m*k*fg|;当f>2*m*k*fg时,所述电流谐波|f-2*m*k*fg|的相序为正序。
5、其中,所述两种电流谐波f+2*m*k*fg、|f-2*m*k*fg|旋转角速度相等且方向一致的dq(f+2*m*k*fg)、dq|f-2*m*k*fg|同步旋转坐标系,具体为:设定dq轴为电机转子的磁极轴dq轴,所述dq轴的旋转角速度为ω=2πf,其方向为逆时针,设定逆时针旋转为正序旋转方向;所述dq(f+2*m*k*fg)轴的旋转角速度为2π(f+2*m*k*fg)=ω(f+2*m*k*fg)/f,其方向与所述dq轴相同;所述dq|f-2*m*k*fg|轴的旋转角速度:当f<2*m*k*fg时,为2π(2*m*k*fg-f)=ω(2*m*k*fg-f)/f,其方向与所述dq轴相反,则以dq轴的旋转方向为参考,可表示为ω(f-2*m*k*fg)/f;当f=2*m*k*fg时,为0;当f>2*m*k*fg时,为2π(f-2*m*k*fg)=ω(f-2*m*k*fg)/f,其方向与dq轴相同,以所述dq轴的旋转速度和方向为参考,dq(f+2*m*k*fg)轴的旋转角速度为dq轴的(f+2*m*k*fg)/f倍,dq|f-2*m*k*fg|轴的旋转角速度为dq轴的(f-2*m*k*fg)/f倍。
6、其中,θe为电机转子d轴和电机a相定子绕组轴线的夹角,所述d(f+2*m*k*fg)、d|f-2*m*k*fg|轴与电机a相轴线的夹角为θ(f+2*m*k*fg)、θ|f-2*m*k*fg|;所述d(f+2*m*k*fg)、d|f-2*m*k*fg|轴与所述d轴的夹角θ(f+2*m*k*fg)-θe、θ|f-2*m*k*fg|-θe与时间t的关系,具体为:θ(f+2*m*k*fg)-θe=2π(2*m*k*fg)t;θ|f-2*m*k*fg|-θe=-2π(2*m*k*fg)t;其中,当id=0控制时,所述d(f+2*m*k*fg)轴、d|f-2*m*k*fg|轴与电机a相轴线的夹角θ(f+2*m*k*fg)、θ|f-2*m*k*fg|分别是d轴与电机a相轴线夹角θe的(f+2*m*k*fg)/f倍、(f-2*m*k*fg)/f倍。
7、其中,所述谐波提取模块还用于:利用公式(1)进行abc/dq(f+2*m*k*fg)变换,并结合低通滤波器,以从三相电流ia、ib、ic中提取所述电流谐波f+2*m*k*fg的2个特征直流分量id(f+2*m*k*fg)、iq(f+2*m*k*fg);其中,θ的取值为θ(f+2*m*k*fg);利用公式(1)进行abc/dq|f-2*m*k*fg|变换,并结合低通滤波器,以从三相电流ia、ib、ic中提取所述电流谐波|f-2*m*k*fg|的2个特征直流分量id|f-2*m*k*fg|、iq|f-2*m*k*fg|;其中,θ的取值为θ|f-2*m*k*fg|;
8、
9、其中,所述谐波抑制计算模块包括4个pi控制器;所述谐波抑制计算模块还用于通过4个所述pi控制器分别对所述4个特征直流分量id(f+2*m*k*fg)、iq(f+2*m*k*fg)、id|f-2*m*k*fg|、iq|f-2*m*k*fg|进行目标值为0的抑制控制,以实现对所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值抑制控制,并得到抑制所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值所需的4个位于dq(f+2*m*k*fg)、dq|f-2*m*k*fg|轴上的电压补偿信号ud(f+2*m*k*fg)、uq(f+2*m*k*fg)、ud|f-2*m*k*fg|、uq|f-2*m*k*fg|。
10、其中,所述谐波电压变换模块包括:第一dq轴变换器,用于通过公式(2)对所述电压补偿信号ud|f-2*m*k*fg|、uq|f-2*m*k*fg|进行dq|f-2*m*k*fg|/dq轴变换以分别得到在d轴、q轴的等效电压补偿量ud|f-2*m*k*fg|、uq|f-2*m*k*fg|;
11、
12、第二dq轴变换器,用于通过公式(3)对所述电压补偿信号ud(f+2*m*k*fg)、uq(f+2*m*k*fg)进行dq(f+2*m*k*fg)/dq轴变换以分别得到在d轴、q轴的等效电压补偿量ud(f+2*m*k*fg)、uq(f+2*m*k*fg);
13、
14、所述谐波电压变换模块,还用于:将同时位于d轴的等效电压补偿量ud|f-2*m*k*fg|、ud(f+2*m*k*fg)进行叠加计算,以得到在d轴的等效电压补偿信号udb;以及将同时位于q轴的等效电压补偿量uq|f-2*m*k*fg|、uq(f+2*m*k*fg)进行叠加计算,以得到在q轴等效电压补偿信号uqb。
15、为解决上述技术问题,本发明采用的另一个技术方案是:提供一种基于谐波相序的电流拍频抑制系统,包括:速度环pi控制器、电流环pi控制器、abc/dq变换器、dq/αβ变换器、pwm控制器;还包括如上所述的电流拍频谐波抑制器。
16、其中,所述谐波电压变换模块还用于将所述等效电压补偿信号udb、uqb以补偿信号分别对应输出至所述电流环pi控制器的输出ud、uq中进行补偿计算以得到ud*、uq*,并输出至所述dq/αβ变换器进行dq/αβ变换处理;所述dq/αβ变换器,用于将经过dq/αβ变换处理得到的uα*、uβ*输出至所述pwm控制器;所述pwm控制器,用于根据所述uα*、uβ*控制pwm信号以实现所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的谐波幅值的抑制,从而实现电流拍频的抑制。
17、为解决上述技术问题,本发明采用的另一个技术方案是:提供一种基于谐波相序的电流拍频抑制方法,所述方法包括:利用电流拍频相关的两种电流谐波f+2*m*k*fg、|f-2*m*k*fg|在不同运行电频率下的相序特性,在dq轴系中设计与所述两种电流谐波旋转角速度相等且方向一致的dq(f+2*m*k*fg)、dq|f-2*m*k*fg|同步旋转坐标系;其中,f为电机运行电频率,m为变流器输入相数,fg为电网频率,k为直流母线电压主要脉动频率的倍数,取值为正整数;电流拍频谐波抑制器通过abc/dq(f+2*m*k*fg)、abc/dq|f-2*m*k*fg|变换和低通滤波器从三相电流中提取所述两种电流谐波f+2*m*k*fg、|f-2*m*k*fg|的特征直流分量;所述电流拍频谐波抑制器通过pi控制器对所述特征直流分量进行目标值为0的抑制控制,以对所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值抑制控制,并输出抑制所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值所需的位于dq(f+2*m*k*fg)、dq|f-2*m*k*fg|轴上的电压补偿信号;所述电流拍频谐波抑制器对所述电压补偿信号进行dq(f+2*m*k*fg)/dq、dq|f-2*m*k*fg|/dq轴变换处理,以分别得到在d轴、q轴的等效电压补偿量;并分别将d轴、q轴的等效电压补偿量对应叠加计算,以分别得到在d轴、q轴的等效电压补偿信号udb、uqb;以及所述电流拍频谐波抑制器将所述等效电压补偿信号udb、uqb以补偿信号分别对应输出至电流环pi控制器的输出ud、uq中进行补偿计算得到ud*、uq*,并经过dq/αβ变换处理得到uα*、uβ*,最后输出至pwm控制器,使所述pwm控制器通过控制pwm信号实现所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的谐波幅值的抑制,从而实现电流拍频的抑制。
18、其中,所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|在不同运行电频率下的相序特性,包括:所述电流谐波f+2*m*k*fg的相序为正序;所述电流谐波|f-2*m*k*fg|的相序与电机运行电频率f相关,具体为:当f<2*m*k*fg时,所述电流谐波|f-2*m*k*fg|的相序为负序;当f=2*m*k*fg时,不存在所述电流谐波|f-2*m*k*fg|;当f>2*m*k*fg时,所述电流谐波|f-2*m*k*fg|的相序为正序。
19、其中,所述两种电流谐波f+2*m*k*fg、|f-2*m*k*fg|旋转角速度相等且方向一致的dq(f+2*m*k*fg)、dq|f-2*m*k*fg|同步旋转坐标系,具体为:设定dq轴为电机转子的磁极轴dq轴,所述dq轴的旋转角速度为ω=2πf,其方向为逆时针,设定逆时针旋转为正序旋转方向;所述dq(f+2*m*k*fg)轴的旋转角速度为2π(f+2*m*k*fg)=ω(f+2*m*k*fg)/f,其方向与所述dq轴相同;所述dq|f-2*m*k*fg|轴的旋转角速度:当f<2*m*k*fg时,为2π(2*m*k*fg-f)=ω(2*m*k*fg-f)/f,其方向与所述dq轴相反,则以dq轴的旋转方向为参考,可表示为ω(f-2*m*k*fg)/f;当f=2*m*k*fg时,为0;当f>2*m*k*fg时,为2π(f-2*m*k*fg)=ω(f-2*m*k*fg)/f,其方向与dq轴相同,以所述dq轴的旋转速度和方向为参考,dq(f+2*m*k*fg)轴的旋转角速度为dq轴的(f+2*m*k*fg)/f倍,dq|f-2*m*k*fg|轴的旋转角速度为dq轴的(f-2*m*k*fg)/f倍。
20、其中,θe为电机转子d轴和电机a相定子绕组轴线的夹角,所述d(f+2*m*k*fg)、d|f-2*m*k*fg|轴与电机a相轴线的夹角为θ(f+2*m*k*fg)、θ|f-2*m*k*fg|;所述d(f+2*m*k*fg)、d|f-2*m*k*fg|轴与所述d轴的夹角θ(f+2*m*k*fg)-θe、θ|f-2*m*k*fg|-θe与时间t的关系,具体为:θ(f+2*m*k*fg)-θe=2π(2*m*k*fg)t;θ|f-2*m*k*fg|-θe=-2π(2*m*k*fg)t;
21、其中,当id=0控制时,所述d(f+2*m*k*fg)轴、d|f-2*m*k*fg|轴与电机a相轴线的夹角θ(f+2*m*k*fg)、θ|f-2*m*k*fg|分别是d轴与电机a相轴线夹角θe的(f+2*m*k*fg)/f倍、(f-2*m*k*fg)/f倍。
22、其中,电流拍频谐波抑制器通过abc/dq(f+2*m*k*fg)、abc/dq|f-2*m*k*fg|变换和低通滤波器从三相电流中提取所述两种电流谐波f+2*m*k*fg、|f-2*m*k*fg|的特征直流分量,具体包括:所述电流拍频谐波抑制器利用公式(1)进行abc/dq(f+2*m*k*fg)变换并结合低通滤波器,以从三相电流ia、ib、ic中提取所述电流谐波f+2*m*k*fg的2个特征直流分量id(f+2*m*k*fg)、iq(f+2*m*k*fg);其中,θ的取值为θ(f+2*m*k*fg);以及所述电流拍频谐波抑制器利用公式(1)进行abc/dq|f-2*m*k*fg|变换并结合低通滤波器,以从三相电流ia、ib、ic中提取所述电流谐波|f-2*m*k*fg|的2个特征直流分量id|f-2*m*k*fg|、iq|f-2*m*k*fg|;其中,θ的取值为θ|f-2*m*k*fg|;
23、
24、其中,所述电流拍频谐波抑制器通过pi控制器对所述特征直流分量进行目标值为0的抑制控制,以对所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值抑制控制,并输出抑制所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值所需的位于dq(f+2*m*k*fg)、dq|f-2*m*k*fg|轴上的电压补偿信号,具体包括:所述电流拍频谐波抑制器通过4个所述pi控制器分别对所述4个特征直流分量id(f+2*m*k*fg)、iq(f+2*m*k*fg)、id|f-2*m*k*fg|、iq|f-2*m*k*fg|进行目标值为0的抑制控制,以实现对所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值抑制控制,并得到抑制所述电流谐波f+2*m*k*fg、|f-2*m*k*fg|的幅值所需的4个位于dq(f+2*m*k*fg)、dq|f-2*m*k*fg|轴上的电压补偿信号ud(f+2*m*k*fg)、uq(f+2*m*k*fg)、ud|f-2*m*k*fg|、uq|f-2*m*k*fg|。
25、其中,所述电流拍频谐波抑制器对所述电压补偿信号进行dq(f+2*m*k*fg)/dq、dq|f-2*m*k*fg|/dq轴变换处理,以分别得到在d轴、q轴的等效电压补偿量;并分别将d轴、q轴的等效电压补偿量对应叠加计算,以分别得到在d轴、q轴的等效电压补偿信号udb、uqb,具体包括:所述电流拍频谐波抑制器通过公式(2)对所述电压补偿信号ud|f-2*m*k*fg|、uq|f-2*m*k*fg|进行dq|f-2*m*k*fg|/dq轴变换以分别得到在d轴、q轴的等效电压补偿量ud|f-2*m*k*fg|、uq|f-2*m*k*fg|;
26、
27、所述电流拍频谐波抑制器通过公式(3)对所述电压补偿信号ud(f+2*m*k*fg)、uq(f+2*m*k*fg)进行dq(f+2*m*k*fg)/dq轴变换以分别得到在d轴、q轴的等效电压补偿量ud(f+2*m*k*fg)、uq(f+2*m*k*fg);
28、
29、所述电流拍频谐波抑制器将同时位于d轴的等效电压补偿量ud|f-2*m*k*fg|、ud(f+2*m*k*fg)进行叠加计算,以得到在d轴的等效电压补偿信号udb;所述电流拍频谐波抑制器将同时位于q轴的等效电压补偿量uq|f-2*m*k*fg|、uq(f+2*m*k*fg)进行叠加计算,以得到在q轴等效电压补偿信号uqb。
30、以上方案中,利用电流拍频相关的两种电流谐波f+2*m*k*fg、|f-2*m*k*fg|的相序特性,分别设计了与其旋转速度和方向相同的dq(f+2*m*k*fg)、dq|f-2*m*k*fg|轴;基于同步旋转坐标轴变换在dq(f+2*m*k*fg)、dq|f-2*m*k*fg|轴实现对电流谐波f+2*m*k*fg、|f-2*m*k*fg|的4个特征直流分量的提取,利用4个pi控制器实现对特征直流分量的抑制和4个电压补偿量的获取,并通过相关变换和计算可得到在dq轴上的等效电压补偿量udb、uqb,并通过注入到电流环pi控制器的输出ud、uq中,以控制pwm信号来实现对电流拍频现象的抑制。通过本发明,控制电流拍频相关电流谐波幅值的特征直流分量等于零为目标,能够直接改善电流拍频现象;分别对电流拍频相关的两种电流谐波同时进行有效抑制,能够保证两种电流谐波均有较低的谐波幅值;只采集和利用相电流信号,不用担心对直流母线电压信号的采集和处理过程中产生的信号延迟;能够适应不同工况,及时且有效处理电流拍频现象。
- 还没有人留言评论。精彩留言会获得点赞!