一种针对定子连体双轴永磁电机的无位置传感器控制方法与流程
本发明属于电机控制领域,尤其涉及一种针对定子连体双轴永磁电机的无位置传感器控制方法。
背景技术:
1、一种新型的定子连体双轴永磁电机被提出,其结构能实现双螺杆无齿轮同步传动,连体电机通过两个转子永磁体之间的磁场相互作用使双转子之间的同步性较其他方法有明显的优势,且能大幅提升系统效率。应用于双轴驱动场合可以解决机械密封、机械结构强度要求高等问题。
2、为了更好的控制连体电机,需要在两个单体上分别安装位置传感器来获得两个单体的位置信号。然而,位置传感器的安装会使连体电机的成本增加,体积增大。通过无位置控制算法可以克服传统位置传感器带来的安装困难、成本高、可靠性低等问题。传统的无位置控制算法针对单台电机,应用在连体电机上只能观测得到连体电机整体定子反电势的位置,无法同时获得两侧单体的转子位置信息从而对连体电机实施控制。
技术实现思路
1、本发明的目的在于针对传统无位置控制算法无法获得连体电机两侧单体转子位置的不足,提供一种针对定子连体双轴永磁电机的无位置传感器控制方法,该方法能够获得两侧单体转子位置,实现连体电机的无位置传感器控制。
2、本发明的目的是通过以下技术方案来实现:一种针对定子连体双轴永磁电机的无位置传感器控制方法,包括以下步骤:
3、采用传统滑模观测器获得两侧单体绕组串联情况下连体电机的定子反电势电机转速ω和观测位置θ;
4、根据连体电机两侧单体的电气参数和检测到的电机转速计算各单体反电势的幅值,之后利用连体电机两侧单体反电势和滑模观测得到的定子反电势的数值关系,计算连体电机两侧单体的转子位置差δθ;利用观测位置θ和转子位置差δθ计算落后侧单体位置;
5、结合针对落后侧的控制方法对连体电机进行矢量控制。
6、进一步地,采用传统滑模观测器获得两侧单体绕组串联情况下连体电机的定子反电势电机转速ω和观测位置θ,包括:
7、连体电机的定子电压为两个单体的电压和,将两侧单体绕组串联连接下的连体电机的电压方程表示为:
8、
9、其中,为外施加的相电压向量;和为分别单体1和单体2的定子绕组电压向量;为连体电机的定子电流向量;xs为连体电机的同步电抗;
10、通过电机电气参数和定子给定α-β轴电压得到α-β轴的定子电流观测值,分别和电机定子α-β轴电流比较得到电流观测误差,进而得到滑模控制函数在α-β轴上的分量,并通过低通滤波得到反电势的观测值;通过数值处理得到转子位置估测值并积分得到转速观测值;
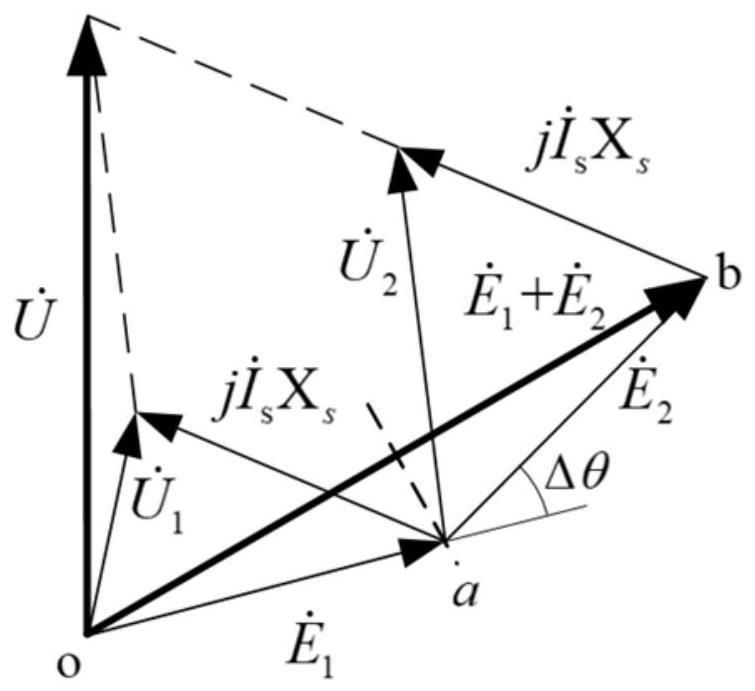
11、由于连体电机两个单体转子转速相同,磁链大小相同,所以单体1和单体2的反电势大小相同,与整体反电势之间构成一个等腰三角形,通过滑模得到的转子位置估测值为两侧单体的中间位置。
12、进一步地,根据连体电机两侧单体的电气参数和检测到的电机转速计算各单体反电势的幅值,之后利用连体电机两侧单体反电势和滑模观测得到的定子反电势的数值关系,计算连体电机两侧单体的转子位置差δθ,包括:
13、当连体电机两侧负载相同时,两侧单体功率角相同,单体1和单体2的反电势和不存在角度差,此时通过滑模得到的观测反电势的角度θ和两单体反电势和的角度θ1,θ2相同;
14、当连体电机两侧负载不相同时,两侧单体功率角不再相同,单体1和单体2的反电势和出现角度差δθ,连体电机稳态情况下,单体1和单体2的反电势与整体反电势满足:
15、
16、当δθ≠0时,单体1和单体2的反电势的数值合与整体反电势的数值不再相等,以此作为依据判断连体电机两侧转子位置是否出现偏差;当反电势的数值合即单体1电角速度ωe1和单体2电角速度ωe2的合与磁链ψf的乘积(ωe1+ωe2)ψf,与反电势的观测幅值不同时,判断两侧转子出现位置差;
17、
18、当δθ≠0时,通过式(2)的数值关系得到两侧单体的转子位置差δθ;
19、
20、假设单体1为落后侧,将两单体电机转子的中间位置θ与式(4)的结果进行计算得到两侧单体转子位置估测值θ1和θ2;
21、
22、进一步地,结合针对落后侧的控制方法对连体电机进行矢量控制,包括:对连体电机的落后侧进行id=0的矢量控制,能够确保连体电机处于稳定运行状态;采用转速、电流双环控制,并将生成的给定电压通过svpwm脉宽调制技术来生成供电电压。
23、本发明的有益效果如下:本发明方法在连体电机相量特性的基础上,通过两单体电机反电势与合成电势间的数值关系,获得两侧单体转子位置,实现定子连体双轴永磁电机的无位置传感器控制,推进无位置控制算法在连体电机中的应用。该方法有着易实现,系统鲁棒性强的优势。
技术特征:
1.一种针对定子连体双轴永磁电机的无位置传感器控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种针对定子连体双轴永磁电机的无位置传感器控制方法,其特征在于,所述采用传统滑模观测器获得两侧单体绕组串联情况下连体电机的定子反电势电机转速ω和观测位置θ,包括:
3.根据权利要求1所述的一种针对定子连体双轴永磁电机的无位置传感器控制方法,其特征在于,由于连体电机两个单体转子转速相同,磁链大小相同,所以单体1和单体2的反电势大小相同,与整体反电势之间构成一个等腰三角形,通过滑模得到的转子位置估测值为两侧单体的中间位置。
4.根据权利要求1所述的一种针对定子连体双轴永磁电机的无位置传感器控制方法,其特征在于,所述根据连体电机两侧单体的电气参数和检测到的电机转速计算各单体反电势的幅值,之后利用连体电机两侧单体反电势和滑模观测得到的定子反电势的数值关系,计算连体电机两侧单体的转子位置差δθ,包括:
5.根据权利要求1所述的一种针对定子连体双轴永磁电机的无位置传感器控制方法,其特征在于,所述结合针对落后侧的控制方法对连体电机进行矢量控制,包括:对连体电机的落后侧进行id=0的矢量控制,能够确保连体电机处于稳定运行状态;采用转速、电流双环控制,并将生成的给定电压通过svpwm脉宽调制技术来生成供电电压。
技术总结
本发明公开了一种针对定子连体双轴永磁电机的无位置传感器控制方法,该方法在连体电机相量特性的基础上,通过两单体电机反电势与合成电势间的数值关系,获得两侧单体转子位置,推进无位置控制算法在连体电机中的应用。方法包括:采用滑模观测器获得两侧单体绕组串联情况下连体电机的定子反电势、电机转速和观测位置;根据连体电机两侧单体的电气参数和检测到的电机转速计算各单体反电势的幅值,之后利用连体电机两侧单体反电势和滑模观测得到的定子反电势的数值关系,计算连体电机两侧单体的转子位置差;利用观测位置和转子位置差计算落后侧单体位置;结合针对落后侧的控制方法对连体电机进行矢量控制。该方法有着易实现,系统鲁棒性强的优势。
技术研发人员:章玮,黄家楠
受保护的技术使用者:余姚市机器人研究中心
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!