基于控制量补偿的最小电压矢量误差控制方法
本发明属于电机变流控制技术,具体为基于控制量补偿的最小电压矢量误差控制方法。
背景技术:
1、在电机的三环控制中,电流环控制是基础,保证了电机运动控制的可靠实现。常规电流环控制是基于两电平空间矢量调制算法实现的,这种调制策略虽然精度高,但是开关次数较多,因此实际应用中逆变器开关损耗高,效率低。
2、考虑降低开关次数,可以选择相邻的基本矢量替代常规空间矢量调制,并通过调整占空比通过最小矢量方法选择选择占空比,用误差最小的基本矢量替代参考矢量。虽然该方法降低了逆变器的开关频率,但是该方法存在着一个无法避免的问题,即始终存在矢量误差。
3、为缓解该问题,本发明专利提出控制量补偿方法,根据矢量调制的误差反向调节电流控制量,从而抑制电压矢量误差对电流控制的影响。
技术实现思路
1、本发明的目的在于提供了一种基于模型预测控制的最小电压矢量误差补偿的永磁电机控制方法。
2、实现本发明目的的技术方案为:一种基于控制量补偿的最小电压矢量误差控制方法,具体步骤为:
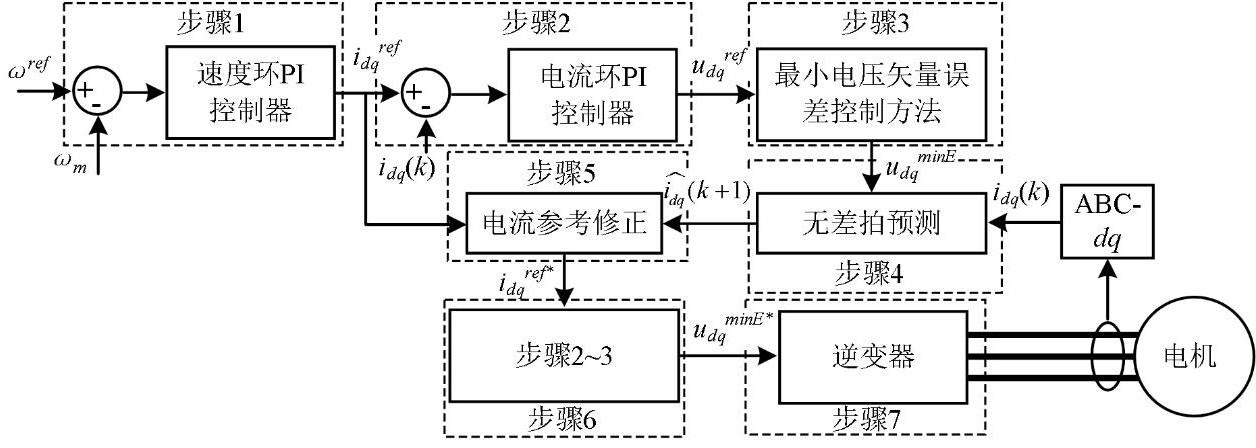
3、步骤1:在速度环中根据转速指令与实际电机转速的误差,计算电流指令参考值;
4、步骤2:在电流环中根据电流指令参考值与实际电流,计算电压参考矢量;
5、步骤 3:采用最小电压矢量误差控制方法,在两电平逆变的六个非零基本矢量中选取与电压参考矢量相邻的基本矢量,根据误差最小原则找出候选电压基本矢量,通过插入零矢量调节占空比,获得与参考电压矢量误差最小的实施矢量组合;
6、步骤4:基于当前电机运行状态,以及步骤3中获得的最小误差实施矢量组合,预测下一周期即将获得的实际电流,即电流预测值,确定电流预测值与电流指令参考值的误差;
7、步骤 5:利用步骤4中的预测电流误差反向修正步骤1中的电流指令参考值;
8、步骤 6:根据步骤5中获得的修正电流指令参考值,重复步骤2~步骤3,再次得到一个最小误差实施矢量组合;
9、步骤 7:将步骤6中获得的最小误差实施矢量组合施加与两电平逆变器,完成电流矢量控制。
10、优选地,选取候选电压基本矢量的具体公式为:
11、
12、其中,为第k次计算周期的相邻的两电压基本矢量与电压参考矢量的误差的模,为第k次计算周期的电压参考矢量,为第k次第i个相邻的电压基本矢量与电压参考矢量之间的夹角。
13、优选地,步骤3中对候选电压基本矢量采用最小电压矢量误差的方法计算占空比,具体为:
14、
15、其中,为第k次计算周期候选电压矢量的占空比,为第k次计算周期的电压参考矢量,为第k次候选电压基本矢量与电压参考矢量之间的夹角,为采用的直流稳压电源电压。
16、优选地,步骤4中采用无差拍预测下一周期的d-q轴实际电流,离散化公式具体为:
17、
18、其中,和分别是在第k次计算周期中候选电压基本矢量的d-q轴分量,和分别是在第k次计算周期采用候选电压基本矢量后第k+1次的电流预测值,和分别是第k次周期的实际电流,和分别是d-q轴电感,是定子电阻,是永磁磁链,是当前时刻的转子电气角速度,为采样周期。
19、优选地,步骤5中根据电流预测值与电流指令参考值的误差调整电流指令参考值,具体为:
20、
21、其中,和分别是在第k次计算周期时调整前的d-q轴电流指令参考值,和分别是在第k次计算周期时调整后的d-q轴电流指令参考值,和分别为d-q轴电流误差的权重。
22、本发明采用的反向调整控制量的方式间接修正电压矢量误差,其显著优点为:在维持低开关次数的同时,本发明根据电压矢量误差对电流指令参考值的实时调整,抑制了电压矢量误差对电流控制的影响。
技术特征:
1.一种基于控制量补偿的最小电压矢量误差控制方法,其特征在于,具体步骤为:
2.根据权利要求1所述的基于控制量补偿的最小电压矢量误差控制方法,其特征在于,选取候选电压基本矢量的具体公式为:
3.根据权利要求1所述的基于控制量补偿的最小电压矢量误差控制方法,其特征在于,步骤3中对候选电压基本矢量采用最小电压矢量误差的方法计算占空比,具体为:
4.根据权利要求1所述的基于控制量补偿的最小电压矢量误差控制方法,其特征在于,步骤4中采用无差拍预测下一周期的d-q轴实际电流,离散化公式具体为:
5.根据权利要求1所述的基于控制量补偿的最小电压矢量误差控制方法,其特征在于,步骤5中根据电流预测值与电流指令参考值的误差调整电流指令参考值,具体为:
技术总结
本发明公开了一种基于控制量补偿的最小电压矢量误差控制方法,在电机矢量控制中,最小电压矢量误差控制即采用最邻近基本电压矢量,并通过优化占空比调节矢量长度,使得实际实施的电压矢量与参考矢量的误差最小。为进一步降低控制误差,采用模型预测该误差矢量在下一时刻造成的电流误差,再用该预测误差反向修正电流控制参考值,最后基于该电流控制参考值,重新调用最小电压矢量误差控制,从而获得与原电流参考值误差最小的实际电流。本发明的核心创新点在于将矢量控制误差转移到控制量,通过两次调用最小电压矢量误差控制方法,在保持低开关次数的基础上优化了电流控制精度。
技术研发人员:孙乐,刘迎广,陈龙淼,佟明昊
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!