一种五相永磁同步电机任意一相开路故障免诊断容错直接转矩控制方法
本发明属于多相电机容错控制领域,尤其涉及五相永磁同步电机(pmsm)开路故障情况下的容错控制。适用于航空航天、电动汽车、舰船推进等对电机运行可靠性要求较高的场合。
背景技术:
1、pmsm具有转矩密度大、效率高、可靠性高等优点,近年来在航空航天、电动汽车、舰船推进等领域得到了广泛的应用。相比于三相电机,多相电机具有更多的控制自由度,能够应用于对可靠性要求较高的场合,因此受到了国内外学者的广泛关注。
2、多相电机在故障发生后,采用容错控制算法,能够使电机保持和正常运行时相似的性能。目前,五相pmsm的容错控制算法主要是基于矢量控制、直接转矩控制以及模型预测控制。直接转矩控制具有转矩动态响应快、结构简单、参数依赖性小等优点,越来越多的学者开始深入研究基于五相pmsm的容错直接转矩控制算法。
3、直接转矩控制策略将当前pmsm的转矩与磁链分别与给定转矩和给定磁链作差,输入滞环比较器,根据结果在开关表中查找当前所需要作用的电压矢量。对于五相pmsm,在正常运行时,可用电压矢量有32个,用其进行开关表的制作较为繁杂,且会对谐波空间造成影响。因此,有学者提出利用虚拟电压矢量来减少复杂性,并使虚拟矢量在三次谐波空间合成为零来提高五相pmsm的电流质量。尽管该方法能够有效地提升控制性能,但是主要针对电机正常运行。当电机发生故障后,电流畸变严重,转矩脉动变大,且需要故障相诊断,基于开关表的容错直接转矩控制算法还需要进一步深入研究。
4、当五相永磁电机一相发生故障后(以a相开路为例),可用电压矢量由32个变为16个,而且基波空间电压矢量幅值不等,分布不均匀。为抑制转矩脉动以及减小电流谐波含量,中国发明专利申请号201910669271.9公开了一种基于新型容错开关表的五相永磁同步电机容错直接转矩控制方法,取得了较好的容错控制效果。然而,只针对a相提出了故障前后使用同一张容错开关表,并没有对其他故障相的情况做出解决,并且其本质上仍需故障相的检测。为了避免检测故障相错误导致电机性能进一步恶化,ieee journal ofemerging and selected topics in power electronics,vol.8,no.3,pp.2634-2644,sept,2020(assessment of virtual-voltage-based model predictive controllers insix-phase drives under open-phase faults)针对六相电机提出了基于虚拟矢量的免故障相诊断的容错控制。然而,该策略基于模型预测控制,计算成本过高。因此,需要进一步研究免故障相诊断的容错直接转矩控制策略,在保证动态性能不变的前提下提升其稳态性能。
技术实现思路
1、本发明的目的在于避免故障相的检测,抑制任意一相开路故障导致的转矩脉动,降低三次谐波,减少计算量,避免故障前后控制系统的重构,确保故障前后五相pmsm都具有优良的动态和稳态性能。为此,提出了一种用于五相pmsm任意一相开路故障情况下的基于开关表的免故障诊断的容错直接转矩控制方法。
2、本发明是通过以下技术手段实现上述技术目的的。
3、一种基于开关表的五相永磁同步电机(pmsm)任意一相开路故障免诊断容错直接转矩控制方法,包括如下步骤:
4、步骤1,采用clarke变换矩阵将驱动五相永磁同步电机pmsm的电压源逆变器上桥臂中功率器件不同开关状态对应的电压变换到两相静止坐标系上,得到正常情况下基波和三次谐波空间的基电压矢量及其空间分布;
5、步骤2,以抑制三次谐波电流ix=0和iy=0为原则,将三次谐波空间的虚拟电压矢量合成为零,进而在基波空间内获得由大、中基电压矢量合成的虚拟电压矢量vi3(i=1-10);由此,在基波空间内每个虚拟电压矢量和基电压矢量的关系为
6、
7、上表中,vi3(i=1-10)表示为虚拟电压矢量名称;vi(i=0-31)表示为基础电压矢量名称;t为控制周期时间;
8、步骤3,五相pmsm任意一相发生开路故障后,虽然电压源逆变器仍对故障电机馈送与正常情况相同的电压矢量,但故障相无法接收逆变器所送电压,此时开路故障情况下的pmsm接受到的在基波和谐波空间的基电压矢量可由去除与故障相相关项的传统clarke变换矩阵将非故障相接受到的电压变换而来,因此故障电机从电压源逆变器接收的基电压矢量与电压源逆变器馈送的基电压矢量是不同的,这些基电压矢量是缺少a相状态的,相比正常情况下的基电压矢量,故障pmsm接收到的基电压矢量位置发生了偏移,且数量减少了;
9、步骤4,在任意一相开路故障情况下,故障电机接收到由这些偏移的基电压矢量所构成的虚拟电压矢量的位置亦发生了偏移,因此根据pmsm所接收到的虚拟矢量重新划分扇区,以期电压源逆变器发出基电压矢量后,pmsm接收到的虚拟电压矢量就是其期望的最优虚拟电压矢量;
10、步骤5,以经过中心点且垂直于各虚拟电压矢量的直线以及虚拟电压矢量自身所在直线作为磁链扇区的分界线,由此pmsm在正常和任意一相开路故障下基波空间可划分出20个磁链扇区;
11、步骤6,在任意一相开路情况下,不同的虚拟电压矢量对磁链和转矩的作用效果各不相同,根据定子磁链所在扇区位置,对磁链和转矩的作用效果相同的虚拟矢量进行归类制作开关表;
12、步骤7,考虑个别相发生开路故障时,定子磁链在某些扇区仅存在唯一一个虚拟电压矢量可供选择,据此确定该扇区角度及其对应的虚拟矢量;当其余相发生开路故障时,定子磁链在这些扇区角度内时也选择上述相应的虚拟矢量;在任意一相发生开路故障时在某些扇区内均有多个虚拟电压矢量对磁链和转矩的作用效果相同的情况时,为保证转矩的快速响应,选择靠近定子磁链垂线且任意一相开路故障状态下均有的虚拟电压矢量,进而确定出一套用于五相pmsm正常情况和任意一相发生开路故障情况下的免故障诊断的基于虚拟电压矢量的容错开关表;
13、如下表所示。
14、
15、上表中,δte代表转矩状态,δte=1表示转矩小于给定值,需要增大转矩;δte=-1表示转矩大于给定值,需要减小转矩;δψs=1表示定子磁链幅值小于给定值,需要增大磁链;δψs=-1表示定子磁链幅值大于给定值,需要减小磁链;θi(i=1-10)代表定子磁链所在扇区号;vi3(i=1-10)表示为虚拟电压矢量名称;
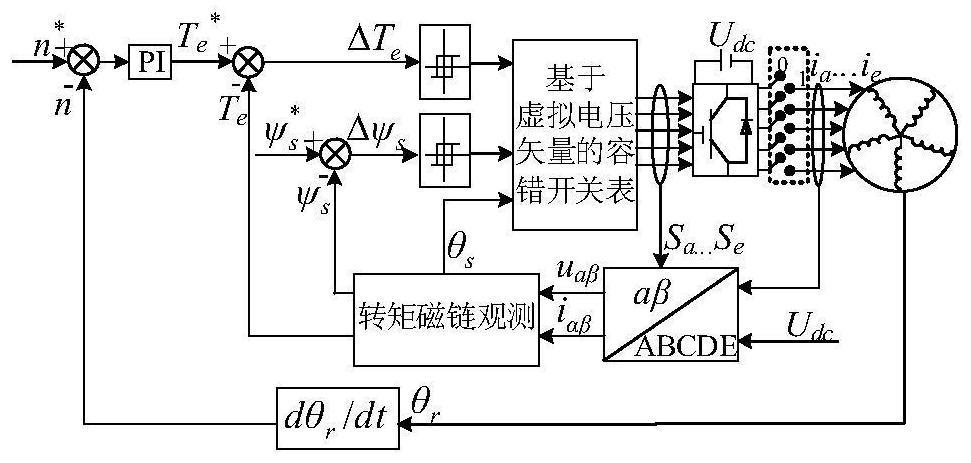
16、步骤8,将给定转速n*和实际转速n作差,经速度环pi调节得到给定转矩te*;采用定子磁链观测器估算定子磁链ψs,并计算出转矩te;给定转矩te*与估测转矩te作差得到δte,给定磁链ψs*与估算磁链ψs作差得到δψs;根据转矩瞬时偏差δte和定子磁链瞬时偏差δψs,结合定子磁链矢量所在扇区,选取基于虚拟电压矢量的容错开关表内相应的虚拟电压矢量,输入到pwm模块中,生成pwm波形,控制电压源逆变器中功率器件的导通与关断,实现五相pmsm正常和任意一相开路故障情况下的高性能直接转矩控制。
17、进一步,所述步骤2中虚拟电压矢量的合成,以抑制三次谐波电流为原则,采用在基波空间中方向相同的大、中基电压矢量合成虚拟电压矢量使其在三次谐波空间为零,其中基波空间大电压矢量的作用时间为0.618t,中电压矢量的作用时间为0.382t,进而得到上述基本电压矢量在基波空间所合成的虚拟电压矢量;这些虚拟电压矢量v13-v103的幅值为0.5528udc,udc为母线电压。
18、进一步,所述步骤3中针对五相pmsm任意一相开路故障情况,不失一般性的,假如电机a相发生开路故障,电压源逆变器仍对故障电机馈送与正常情况相同的基电压矢量,但电机a相无法接收电压源逆变器所馈送的电压,所以故障电机接收的基电压矢量是缺少a相状态的;为便于分析,故障电机接受到的电压矢量仍按正常情况下接受到的电压矢量进行命名,即与电压源逆变器发送的电压矢量命名规则一致;若其余四相中某一相发生开路故障,参照a相开路故障情况,得到故障pmsm所接受到的基波和三次谐波空间的电压矢量及其分布。
19、进一步,所述步骤4中的具体过程为:
20、步骤4.1,假如电机a相发生开路故障,电压源逆变器不知电机a相是否发生开路故障,依旧发送与电机正常情况下相同的中、大基电压矢量来构成虚拟电压矢量;由于a相开路故障前后构成各虚拟电压矢量的基电压矢量作用时间保持不变;
21、步骤4.2,按步骤4.1的方法,构建其余四相中某一相开路故障状态下的虚拟矢量;由于故障pmsm接收到的基电压矢量在故障情况会发生偏移,因此得到的虚拟电压矢量分布亦发生偏移。
22、进一步,所述步骤5中,正常和任意一相开路故障情况下在基波空间划分出的20个磁链扇区的具体角度范围如下表所示
23、
24、
25、进一步,所述步骤6的具体过程为:
26、步骤6.1,不同的虚拟电压矢量对磁链和转矩的作用效果各不相同,对磁链和转矩的作用效果相同的虚拟矢量进行归类,以对转矩和磁链具有增大作用的虚拟电压矢量为例,在任意一相开路故障下,对转矩和磁链具有增大作用的虚拟电压矢量可表示如下
27、
28、步骤6.2,参照步骤6.1的方法,对转矩和磁链具有减小作用,对转矩和磁链分别具有减小、增大作用,以及对转矩和磁链分别具有增大、减小作用的虚拟矢量进行归类,得到基于虚拟电压矢量的归类表。
29、进一步,所述步骤7的具体过程为:
30、步骤7.1,根据步骤6.1得到的在任意一相开路故障下,对转矩和磁链具有增大作用的虚拟电压矢量归类表,可发现当b相开路故障,定子磁链在扇区θb2(16.5°-37.5°),只有v33可以选择;因此当其他相开路故障且定子磁链在16.5°-37.5°区间,也应选择v33来增大转矩和磁链,确保在任意相开路故障情况下且定子磁链在16.5°-37.5°区间,只可使用同一个虚拟矢量v33来增大转矩和磁链;
31、步骤7.2,按照步骤7.1的方法,可以得到定子磁链在扇区θe5(52.5°-73.5°)、θc6(88.5°-109.5°)、θa8(124.5°-145.4°)、θd10(160.5°-181.5°)、θb12(196.5°-217.5°)、θe15(232.5°-253.5°)、θc16(268.5°-289.5°)、θa18(304.5°-325.8°)和θd20(340.5°-1.5°)具有类似于扇区θb2(16.5°-37.5°)的唯一虚拟电压矢量可供选择;采用上述扇区角度范围及其所选的虚拟电压矢量来增大转矩和定子磁链;
32、步骤7.3,除步骤7.2中的扇区角度外,在剩余的扇区角度范围内,任意一相发生开路故障时均有多个虚拟电压矢量对磁链和转矩具有增大的作用效果;为保证转矩的快速响应,选择靠近定子磁链垂线且任意相开路状态下均有的虚拟电压矢量,从而得到一套在正常和任意一相开路故障情况下对磁链和转矩具有增大的作用效果的基于虚拟电压矢量的开关表;
33、步骤7.4,查询步骤6.2得到的虚拟矢量对转矩和磁链不同作用效果的基于虚拟电压矢量的归类表,按照步骤7.1-7.3的方法,制作出五相pmsm任意一相开路故障且免故障诊断的基于虚拟电压矢量的容错开关简表如下所示
34、
35、步骤7.5,根据步骤7.4所得的五相pmsm任意一相开路故障且免故障诊断的基于虚拟电压矢量的容错开关简表,在δte=1且δψs=1和δte=-1且δψs=-1情况下所划分的扇区角度相同,δte=1且δψs=-1和δte=-1且δψs=1所划分的扇区角度相同,因此还应再细分扇区,使得这四种情况的扇区划分相同,得到任意一相开路故障情况下的基于虚拟电压矢量的容错开关表。
36、本发明具有以下有益效果:
37、1)本发明不但保持了传统dtc结构简洁和转矩响应速度快的特点,而且避免了故障发生后重新架构控制系统、划分扇区和切换开关表,节省了cpu资源。
38、2)本发明不但有效抑制了任意一相开路故障导致的转矩脉动,减小了三次谐波电流,而且提高了电机在故障情况下的稳态性能,且使动态性能与正常情况下相媲美。
39、3)本发明避免了故障相的故障诊断工作,从而规避了诊断错误的可能性以及在故障诊断时间内故障导致的电机性能恶化,提高了五相pmsm运行的可靠性以及运行性能;同时实现了在故障前后使用相同的直接转矩控制策略,确保了故障前后具有相似的稳态和动态性能。
- 还没有人留言评论。精彩留言会获得点赞!