一种适用柔性直流的构网型主动支撑控制方法及系统与流程
本发明涉及电力系统、柔性直流电网与直流馈入领域,具体涉及一种适用柔性直流的构网型主动支撑控制方法及系统。
背景技术:
1、随着电力电子技术的快速发展,未来电力系统电力电子化新能源占比将不断上升,电力系统的转动惯量与电网强度下降,对电力系统的安全稳定运行构成的威胁也越来越大。柔性直流输电作为支撑区域电网互联与新能源外送的重要手段,其控制策略决定了系统在低惯量弱电网下的稳定性。传统的跟网型控制在连接两低惯量区域弱电网下存在同步稳定性问题,且难以在负荷变化与故障下为区域电网提供惯量。
技术实现思路
1、为了解决传统的跟网型控制在连接两低惯量区域弱电网下存在同步稳定性问题,且难以在负荷变化与故障下为区域电网提供惯量的问题,本发明提出了一种适用柔性直流的构网型主动支撑控制方法,该方法应用于定功率换流站,包括:
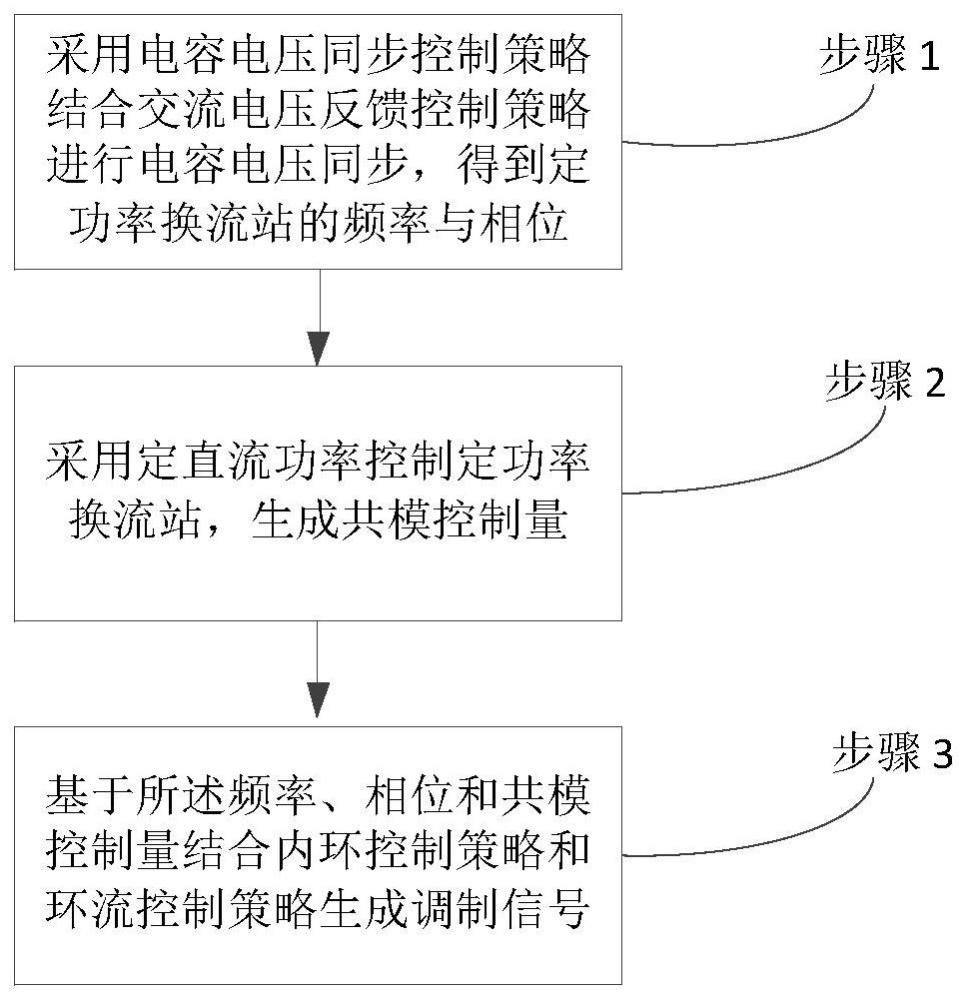
2、采用电容电压同步控制策略结合交流电压反馈控制策略进行电容电压同步,得到定功率换流站的频率与相位;
3、采用定直流功率控制定功率换流站,生成共模控制量;
4、基于所述频率、相位和共模控制量结合内环控制策略和环流控制策略生成调制信号。
5、可选的,所述采用电容电压同步控制策略结合交流电压反馈控制策略进行电容电压同步,包括:
6、采用定交流电压控制策略,维持q轴电压为0,或采用反馈控制guquq使得稳态反馈为0;
7、在维持q轴电压为0或稳态反馈为0时,电容电压偏差正比于电网频率偏差。
8、可选的,所述定功率换流站的频率与相位的控制表达式如下式所示:
9、
10、式中,θ是柔直控制器相角;s为拉普拉斯算子;ωref、1/dp、δu∑、guq和uq分别是参考角速度、比例系数、电容电压和的偏差、交流电压反馈控制系数和交流电压q轴分量;和分别是桥臂电容电压和的参考值与桥臂电容电压和的参考值,x=a,b,c与k=u,l表示三相与上下桥臂。
11、可选的,所述定功率换流站的频率与相位的控制表达式如下式所示:
12、
13、式中,θ是柔直控制器相角;s为拉普拉斯算子;ωref、δuσ、guq和uq分别是参考角速度、电容电压和的偏差、交流电压反馈控制系数和交流电压q轴分量;gsyn包含高通滤波器和1/dp,δω是控制器频率偏差。
14、可选的,所述采用定直流功率控制定功率换流站,生成共模控制量的控制表达式如下式所示:
15、umdc=0.5udc+piidc(idcref-idc)=0.5udc+piidc[pipdc(pdcref-pdc+gωpδω)-idc]
16、式中,umdc、udc、idc、idcref、piidc、pipdc分别是共模电压、直流电压标称值、直流电流、直流电流参考值、定功率换流站的电流比例积分pi控制器、定功率换流站的电压比例积分pi控制器,pdcref为率功参考,pdc为功率反馈;gωp为功率调频控制器,δω是控制器频率偏差。
17、可选的,所述调制信号,包括:上桥臂的调制参考波和下桥臂的调制参考波;
18、所述上桥臂的调制参考波和所述下桥臂的调制参考波分别按下式计算:
19、
20、
21、式中,mku和mkl分别为柔直换流站的上下桥臂的调制参考波,ud、uc为差模与环流控制生成的电压参考值,udc为桥臂电容电压和平均值,umdc为换流站的共模调制输出量。
22、再一方面,本技术还提供了一种定功率换流站,所述定功率换流站用于:
23、采用电容电压同步控制策略结合交流电压反馈控制策略进行电容电压同步,得到定功率换流站的频率与相位;
24、采用定直流功率控制定功率换流站,生成共模控制量;
25、基于所述频率、相位和共模控制量结合内环控制策略和环流控制策略生成调制信号。
26、可选的,定功率换流站中采用电容电压同步控制策略结合交流电压反馈控制策略进行电容电压同步的具体实现过程包括:
27、采用定交流电压控制策略,维持q轴电压为0,或采用反馈控制guquq使得稳态反馈为0;
28、在维持q轴电压为0或稳态反馈为0时,电容电压偏差正比于电网频率偏差。
29、可选的,定功率换流站中定功率换流站的频率与相位的控制表达式如下式所示:
30、
31、式中,θ是柔直控制器相角;s为拉普拉斯算子;ωref、1/dp、δu∑、guq和uq分别是参考角速度、比例系数、电容电压和的偏差、交流电压反馈控制系数和交流电压q轴分量;和分别是桥臂电容电压和的参考值与桥臂电容电压和的参考值,x=a,b,c与k=u,l表示三相与上下桥臂。
32、可选的,定功率换流站中定功率换流站的频率与相位的控制表达式如下式所示:
33、
34、式中,θ是柔直控制器相角;s为拉普拉斯算子;ωref、δuσ、guq和uq分别是参考角速度、电容电压和的偏差、交流电压反馈控制系数和交流电压q轴分量;gsyn包含高通滤波器和1/dp,δω是控制器频率偏差。
35、可选的,定功率换流站中采用定直流功率控制定功率换流站,生成共模控制量的控制表达式如下式所示:
36、umdc=0.5udc+piidc(idcref-idc)=0.5udc+piidc[pipdc(pdcref-pdc+gωpδω)-idc]
37、式中,umdc、udc、idc、idcref、piidc、pipdc分别是共模电压、直流电压标称值、直流电流、直流电流参考值、定功率换流站的电流比例积分pi控制器、定功率换流站的电压比例积分pi控制器,pdcref为率功参考,pdc为功率反馈;gωp为功率调频控制器,δω是控制器频率偏差。
38、可选的,定功率换流站中调制信号,包括:上桥臂的调制参考波和下桥臂的调制参考波;
39、所述上桥臂的调制参考波和所述下桥臂的调制参考波分别按下式计算:
40、
41、
42、式中,mku和mkl分别为柔直换流站的上下桥臂的调制参考波,ud、uc为差模与环流控制生成的电压参考值,udc为桥臂电容电压和平均值,umdc为换流站的共模调制输出量。
43、再一方面,本技术还提供了一种适用柔性直流的构网型主动支撑控制方法,该方法应用于孤岛换流站,包括:
44、采用柔性直流电压同步控制策略,结合交流电压反馈控制策略进行直流电压同步,得到柔直控制器频率与相位;
45、孤岛换流站采用孤岛控制策略控制电容电压生成共模控制量;
46、基于所述频率、相位和共模控制量结合内环控制策略和环流控制策略生成调制信号。
47、可选的,所述采用柔性直流电压同步控制策略,结合交流电压反馈控制策略进行直流电压同步,包括:
48、采用定交流电压控制策略,维持q轴电压为0,或采用反馈控制guquq使得稳态反馈为0;
49、在维持q轴电压为0或稳态反馈为0时,直流电压偏差正比于电网频率偏差。
50、可选的,采用定交流电压控制策略,维持q轴电压为0,或采用反馈控制guquq使得稳态反馈为0的表达式如下式所示:
51、idrefs=piv(udref-ud),iqrefs=piv(uqref-uq)
52、式中:idrefs、iqrefs、piv、udref、uqref、ud、uq分别是生成的d轴电流参考、q轴电流参考、电压pi控制器、d轴电压参考、q轴电压参考、d轴电压反馈值、q轴电压反馈值。
53、可选的,所述柔性直流电压同步控制策略的表达式如下式所示:
54、
55、式中,θ为柔直控制器相角,udc为直流电压标称值,guq为交流电压反馈控制系数,uq为交流电压q轴分量,s为拉普拉斯算子。
56、可选的,所述孤岛换流站采用孤岛控制策略控制电容电压生成共模控制量的表达式如下式所示:
57、
58、式中,udcm为共模电压;piuc为外环控制器;guc为内环控制器;为桥臂电容电压和;为桥臂电容电压和的参考值;udcref为直流电压参考值;udc为直流电压;udc为直流电压标称值;x=a,b,c与k=u,l表示三相与上下桥臂;δuσ为电容电压和的偏差。
59、可选的,所述调制信号,包括:上桥臂的调制参考波和下桥臂的调制参考波;
60、所述上桥臂的调制参考波和所述下桥臂的调制参考波分别按下式计算:
61、
62、
63、式中,mku和mkl分别为柔直换流站的上下桥臂的调制参考波,ud、uc为差模与环流控制生成的电压参考值,udc为直流电压标称值,umdc为换流站的共模调制输出量。
64、再一方面,本技术还提供了一种孤岛换流站,所述孤岛换流站用于:
65、采用柔性直流电压同步控制策略,结合交流电压反馈控制策略进行直流电压同步,得到柔直控制器频率与相位;
66、孤岛换流站采用孤岛控制策略控制电容电压,生成共模控制量;
67、基于所述频率、相位和共模控制量结合内环控制策略和环流控制策略生成调制信号。
68、可选的,所述孤岛换流站中采用柔性直流电压同步控制策略,结合交流电压反馈控制策略进行直流电压同步具体实现过程包括:
69、采用定交流电压控制策略,维持q轴电压为0,或采用反馈控制guquq使得稳态反馈为0;
70、在维持q轴电压为0或稳态反馈为0时,直流电压偏差正比于电网频率偏差。
71、可选的,所述孤岛换流站中采用定交流电压控制策略,维持q轴电压为0,或采用反馈控制guquq使得稳态反馈为0的表达式如下式所示:
72、idrefs=piv(udref-ud),iqrefs=piv(uqref-uq)
73、式中:idrefs、iqrefs、piv、udref、uqref、ud、uq分别是生成的d轴电流参考、q轴电流参考、电压pi控制器、d轴电压参考、q轴电压参考、d轴电压反馈值、q轴电压反馈值。
74、可选的,所述孤岛换流站中柔性直流电压同步控制策略的表达式如下式所示:
75、
76、式中,θ为柔直控制器相角,udc为直流电压标称值,guq为交流电压反馈控制系数,uq为交流电压q轴分量,s为拉普拉斯算子。
77、可选的,所述孤岛换流站中采用孤岛控制控制电容电压生成共模控制量的表达式如下式所示:
78、
79、式中,udcm为共模电压;piuc为外环控制器;guc为内环控制器;为桥臂电容电压和;为桥臂电容电压和的参考值;udcref为直流电压参考值;udc为直流电压;udc为直流电压标称值;x=a,b,c与k=u,l表示三相与上下桥臂;δuσ为电容电压和的偏差。
80、可选的,所述孤岛换流站中所述调制信号,包括:上桥臂的调制参考波和下桥臂的调制参考波;
81、所述上桥臂的调制参考波和所述下桥臂的调制参考波分别按下式计算:
82、
83、
84、式中,mku和mkl分别为柔直换流站的上下桥臂的调制参考波,ud、uc为差模与环流控制生成的电压参考值,udc为直流电压标称值,umdc为换流站的共模调制输出量。
85、再一方面,本技术还提供了一种适用柔性直流的构网型主动支撑控制方法,该方法应用于定直流电压换流站,包括:
86、采用共模控制量进行定直流电压控制生成共模控制量;
87、由共模控制量结合内环控制策略和环流控制策略生成定直流电压换流站的调制信号。
88、可选的,所述采用共模控制量进行定直流电压控制生成共模控制量的控制策略表达式如下式所示:
89、umdc=0.5udc+piidc(idcref-idc)=0.5udc+piidc[piudc(udcref+gωuδω-udc)-idc]
90、其中umdc、udc、idc、idcref、udc、udcref、piidc、piudc分别是共模电压、直流电压标称值、直流电流、直流电流参考值、直流电压、直流电压参考值、定直流电压换流站的电流比例积分pi控制器、定直流电压换流站的电压比例积分pi控制器,δω是控制器频率偏差,gωu是调频控制器。
91、可选的,所述调制信号,包括:上桥臂的调制参考波和下桥臂的调制参考波;
92、所述上桥臂的调制参考波和所述下桥臂的调制参考波分别按下式计算:
93、
94、
95、式中,mku和mkl分别为柔直换流站的上下桥臂的调制参考波,ud、uc为差模与环流控制生成的电压参考值,udc为桥臂电容电压和平均值,umdc为换流站的共模调制输出量。
96、再一方面,本技术还提供了一种定直流电压换流站,所述定直流电压换流站用于:
97、采用共模控制量进行定直流电压控制生成共模控制量;
98、由共模控制量结合内环控制策略和环流控制策略生成定直流电压换流站的调制信号。
99、优选的,所述定直流电压换流中采用共模控制量进行定直流电压控制生成共模控制量的控制策略表达式如下式所示:
100、umdc=0.5udc+piidc(idcref-idc)=0.5udc+piidc[piudc(udcref+gωuδω-udc)-idc]
101、其中umdc、udc、idc、idcref、udc、udcref、piidc、piudc分别是共模电压、直流电压标称值、直流电流、直流电流参考值、直流电压、直流电压参考值、定直流电压换流站电流比例积分pi控制器、定直流电压换流站的电压比例积分pi控制器,δω是控制器频率偏差,gωu是调频控制器。
102、优选的,所述定直流电压换流中调制信号,包括:上桥臂的调制参考波和下桥臂的调制参考波;
103、所述上桥臂的调制参考波和所述下桥臂的调制参考波分别按下式计算:
104、
105、
106、式中,mku和mkl分别为柔直换流站的上下桥臂的调制参考波,ud、uc为差模与环流控制生成的电压参考值,udc为桥臂电容电压和平均值,umdc为换流站的共模调制输出量,δω是控制器频率偏差,gωu是调频控制器。
107、再一方面本发明还提供了一种适用柔性直流的构网型主动支撑控制系统,包括:
108、定直流电压换流站、定功率换流站和/或孤岛换流站;
109、其中,所述定功率换流站采用上述所述的一种定功率换流站;
110、所述孤岛换流站采用上述所述的一种孤岛换流站;
111、所述定直流电压换流站采用上述所述的一种定直流电压换流站。
112、再一方面,本技术还提供了一种计算设备,包括:一个或多个处理器;
113、处理器,用于执行一个或多个程序;
114、当所述一个或多个程序被所述一个或多个处理器执行时,实现如上述所述的一种适用柔性直流的构网型主动支撑控制方法。
115、再一方面,本技术还提供了一种计算机可读存储介质,其上存有计算机程序,所述计算机程序被执行时,实现如上述所述的一种适用柔性直流的构网型主动支撑控制方法。
116、与现有技术相比,本发明的有益效果为:
117、本发明提供了一种适用柔性直流的构网型主动支撑控制方法,包括:采用电容电压同步控制策略结合交流电压反馈控制策略进行电容电压同步,得到定功率换流站的频率与相位;采用定直流功率控制定功率换流站,生成共模控制量;基于所述频率、相位和共模控制量结合内环控制策略和环流控制策略生成调制信号。本发明通过共模控制量将直流侧功率与同步机的原动机功率对应,实现了交直流侧的真正意义上的独立调控。该共模控制量实现了传统差模分量的交流侧控制的定直流电压、功率的功能,解决传统的跟网型控制在连接两低惯量区域弱电网下存在的同步稳定性问题。
- 还没有人留言评论。精彩留言会获得点赞!