一种永磁同步电机无模型快速非奇异终端滑模控制方法
本发明涉及永磁同步电机,更具体地,涉及一种永磁同步电机无模型快速非奇异终端滑模控制方法。
背景技术:
1、永磁同步电机(permanent magnet synchronous motor,pmsm)由于其调速性能好、构造简易、高额功率因数、实用领域广等优点已被广泛地应用于各种工业领域的驱动系统中作为牵引电机使用。但是,pmsm是一个强耦合、非线性的多变量复杂系统。在面对负载转矩突变或受外界干扰波动较大情况时,传统pi控制作为一种线性控制策略在pmsm驱动系统中存在弊端,保障不了在高性能控制应用中的pmsm驱动系统快速稳定运行。为解决传统pi控制带来的局限性,国内外研究者提出了一阶滑模面的无模型控制,减小了电机参数摄动和外界扰动对整个控制系统的影响,但系统存在抖振现象。在cn202211394827.6基于改进型趋近律的永磁同步电机无传感器滑模控制方法针对传统滑模观测器由于其切换函数在零点处的突变而导致系统出现高频抖振问题,公开其步骤包括构建永磁同步电机调速系统;对滑模控制器的指数趋近律的等速项和指数项进行改进,并对符号函数进行平滑处理;根据李雅普诺夫稳定判断改进指数趋近律的滑模控制器是满足可达性条件;改进滑模观测器的开关函数,计算定子电流误差方程,设计滑模控制律,并进行稳定性分析。该专利通过对等速项和指数项各自增加以速度误差绝对值为变量的函数;对指数趋近律中符号函数进行改进优化。虽然该专利削弱抖振和超调大问题,提高响应速度以及控制系统动态,但是,该专利中的控制会因参数突变电机参数变化导致系统控制效果降低。
技术实现思路
1、本发明要解决的主要技术问题是针对现有技术中传统无模型滑模控制因电机参数变化导致系统控制效果降低的问题,为增强pmsm转速环节采用一阶滑模面的无模型控制在参数突变时的控制效果,提供一种将高阶滑模控制和无模型控制相结合的一种永磁同步电机无模型快速非奇异终端滑模控制方法。
2、本发明的目的通过以下技术方案予以实现:
3、一种永磁同步电机无模型快速非奇异终端滑模控制方法,包括以下步骤:
4、s1.建立永磁同步电机转速环节的超局部模型:
5、
6、其中,为系统参数可调值,表示系统的未知扰动部分,ωe=pnωm为电机的电角速度,ψect=id(ld-lq)+ψr为有效磁链,iq为电流在d-q轴坐标系下的分量,ψr为永磁体磁链标称值,ωm为电机的机械角速度,pn为电机的极对数,j为转动惯量,rω为摩擦系数,tl、te分别为负载转矩与电磁转矩;
7、s2.设计高阶滑模面为:
8、
9、其中,ξ>0,γ>0,γ和ξ为状态误差增益,1<q<2,p>q,均为正奇数,电机转速误差定义为系统状态变量,设计状态方程:为电机的给定转速值;
10、s3.在传统趋近律的等速项中加入调节函数f(s),在指数相中引入系统状态变量|x|m作为调节函数,设计指数趋近律为:
11、
12、其中,c1>0,c2>0,l>0,d>0,1>m>0,s为系统滑模面定义,x为系统的状态变量;
13、s4.结合s2中的高阶滑模面和s3中的指数趋近律,得到转速环节的无模型滑模控制器,并对控制器的稳定性进行验证,所述滑模控制器为:
14、uc=ue+c1f(s)h(s)c2+|eω|ms
15、uc为控制器的输出,ue为等效控制律;
16、s5.设计扩展滑膜观测器为:
17、
18、其中,为ωe的观测估算值,为扰动的观测估算值,usmo为滑膜设计函数,g为函数增益值。
19、进一步地,将未知扰动值f作为系统的扩展变量,建立基于扩展变量f的pmsm转速环节超局部模型矩阵形式为:
20、
21、其中,f(t)是未知扰动f的变化率。
22、进一步地,步骤s2中,令s=0,可得以下方程:
23、
24、其中,σ=-(1/γ)1/q,σ<0;
25、假设在有限时间t秒内,系统收敛为零,对上式两边积分:
26、
27、
28、式中,且σ<0,则可得:
29、
30、解得:
31、
32、由此可知,当选取合适参数,系统状态变量将在有限时间内沿滑模面收敛至零。
33、进一步地,趋近律的等速项中加入调节函数f(s),并使用连续的sigmoid函
34、数h(s),同时在指数项中引入系统状态变量|x|m作为调节函数。
35、进一步地,等效控制律ue的计算步骤为:
36、对高阶滑模面求导得到:
37、
38、令保障状态变量稳定在s=0的滑模面上,得出等效控制律ue:
39、
40、进一步地,s4中采用lyapunov函数v证明无模型滑模控制器的稳定性,证明步骤为:
41、对v=0.5e12求导,得到:
42、
43、当1<q<2,p>q满足:
44、
45、其中,a取正整数,则得到:
46、
47、根据李雅普诺夫稳定性定理,系统状态可以根据滑动在有限的时间内收敛到零,趋近律可以跟随系统状态变量自适应调节速度收敛于滑模面。
48、进一步地,将转速环节超局部模型矩阵与扩展滑膜观测器相减,得到:
49、
50、其中,eω为转速的给定值与观测实际值之差;ef为转速部分中未知扰动观测误差;
51、设计滑模面s1=eω,并将指数趋近率带入相减得到的差式中,得到:
52、ef-usmo=-k1sgn(eω)-k2eω
53、其中,k1>0,k2>0都为趋近率增益;ef为未知扰动观测部分,因此usmo可为
54、usmo=k1sgn(eω)+k2eω。
55、进一步地,扩展滑膜观测器通过lyapunov函数证明稳定性,证明步骤包括:
56、令对v1求导,得到:
57、v′=s1s1′
58、=eωeω′
59、=eω(ef-usmo)
60、=eω(-k1sgn(eω)-k2eω)≤0
61、由lyapunov稳定性判别可知,合理取k1、k2的值,转速的给定值与观测实际值之差将渐近收敛为0,所设计的观测器趋于稳定。
62、与现有技术相比,有益效果是:
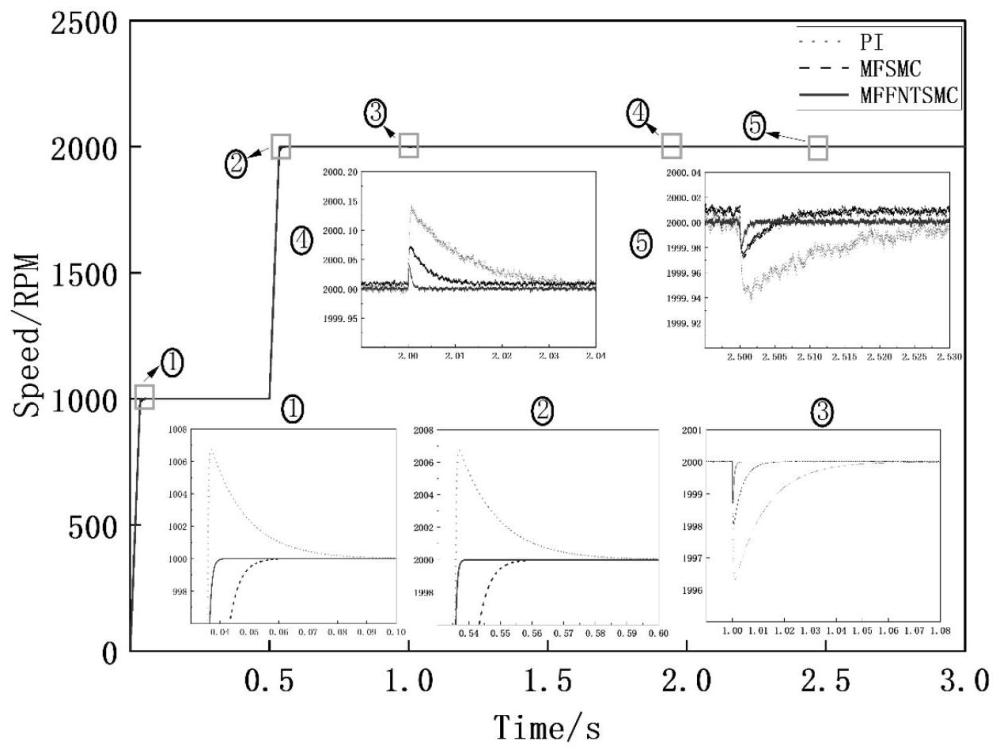
63、本发明采用新型趋近率和高阶滑模面设计了基于快速非奇异终端滑模的新无模型控制器,减少了系统状态变量收敛时间,使电机初始启动无超调,转速更快响应至给定值。本发明的控制方法能够使a相电流thd降低至3.44%,转矩脉动降低至4.6%,具有更好的稳态性能。并进一步增强了无模型滑模控制在电机转矩突增、d-q轴电感突变时的暂态性能和响应速度,增强了系统的控制效果,保障了系统在高性能运行下的稳定。
- 还没有人留言评论。精彩留言会获得点赞!