一种基于图像识别的永磁同步电机无位置控制系统及方法
本发明涉及电机控制,具体为一种基于图像识别的永磁同步电机无位置控制系统及方法。
背景技术:
1、永磁同步电机具有效率高、可靠性好、转矩脉动小等优点,在电机控制中得到了广泛的应用。高性能的电机控制需要高精度的转子位置信息。一般情况下,通过与转子同轴安装的机械位置传感器直接测量位置。并且,安装机械位置传感器这将导致电机系统的成本和尺寸的增加,并且由于传感器的额外布线和连接,也降低了系统的稳健性和可靠性。甚至,在某些特殊应用由于空间限制、环境恶劣等原因,也没办法使用机械传感器。针对这些问题,无传感器控制是一种很好的解决方案。
2、无传感器控制方案大致可以分为两大类:基于基频数学模型的控制和基于电机凸极性的控制。基于基频数学模型的方法利用永磁同步电机的反电动势进行估计位置,该方法只适合于中高速范围。另一方面,基于电机凸极性的无传感器控制适应于低速范围,即使是在零速下也能够获得转子位置。根据高频注入坐标系的不同,电机凸极性的控制可分为旋转矢量电压注入和脉冲电压矢量注入。旋转信号注入需要较高的凸极性,对于低凸极性的表贴式电机,使用高频旋转电压注入方法进行位置估计存在较大的估算误差;脉振信号注入可以通过产生额外的饱和凸极性,使在低凸极性电机,但该方法由于存在多个收敛点,可能会带来系统不稳定的问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于图像识别的永磁同步电机无位置控制系统及方法,解决了对于低凸极率的永磁同步电机运用图像识别技术充分挖掘图像信息中位置特征,实现高精度和高鲁棒性无位置估计的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
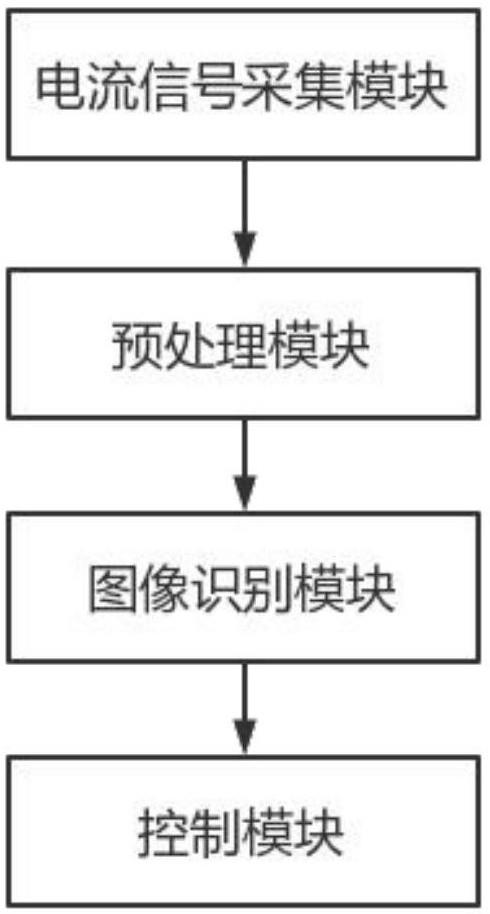
5、第一方面,提供了一种基于图像识别的永磁同步电机无位置控制系统,包括:
6、电流信号采集模块,用于收集不同转子位置下的电流数据,用于生成训练数据样本集;
7、预处理模块,用于将收集到的电流数据转换到同步轴系滤波器、带通滤波器提取高频响应电流的负序电流和二次正序高频电流信号,用于生成图像数据;
8、图像识别模块,用于利用图像处理技术和机器学习算法,在模型训练阶段从生成图片中提取出与位置信息关联的特征信息,根据深度学习的结果生成识别模型,并保存模型参数;在图像识别阶段,基于训练好的识别模型,对当前图像数据进行识别,并输出识别标签值;
9、控制模块,用于在图像识别阶段根据图像识别模块识别出的标签值进行查表输出最终的位置估算结果。
10、优选的,所述电流信号采集模块包括采样电路和ad转换模块,所述采样的电路和ad转换模块分别位于驱动板和控制板上。
11、优选的,所述预处理模块包括滤波模块和成像模块,其中,所述滤波模块用于抑制采样误差,所述成像模块根据训练模型的图像模板要求生成图像,为下一步图像识别,做准备。
12、优选的,所述图像识别模块包括识别存储器和图像识别运算模块,其中,所述识别存储器用于存储模型参数,所述图像识别运算模块基于训练好的识别模型,对当前图像数据进行识别,并输出识别标签值。
13、优选的,所述识别模型的确定,具体包括:
14、确定位置估算精度,确定分类数量;
15、实验获取样本数据,确定训练样本和测试样本;
16、调整识别模型的结构、参数;
17、对识别模型进行训练和验证,判断识别率大小,确定识别模型的结构、参数。
18、优选的,所述判断识别率大小,确定识别模型的结构、参数,具体包括:
19、将混淆矩阵的正确率作为识别模型的可靠性评价准则,当混淆矩阵的准确识别率大于95%时,识别模型的结构和参数随即被确定下来,当混淆矩阵的准确识别率小于或等于95%时,则重新调整识别模型的结构和参数,直至混淆矩阵的准确识别率大于95%。
20、优选的,所述控制模块包括控制存储器和逻辑运算模块,所述控制存储器用于根据图像识别模块识别出的标签,输出查表值,所述逻辑运算模块用于决定最终的位置估算输出。
21、第二方面,提供了一种基于图像识别的永磁同步电机无位置控制方法,包括:
22、收集不同转子位置下的电流数据,用于生成训练数据样本集;
23、将收集到的电流数据转换到同步轴系滤波器、带通滤波器提取高频响应电流的负序电流和二次正序高频电流信号,用于生成图像数据;
24、结合生成的图像数据并利用图像处理技术和机器学习算法,从生成图片中提取出与位置信息关联的特征信息,根据深度学习的结果生成识别模型,并保存模型参数;基于训练好的识别模型,对当前图像数据进行识别,并输出识别标签值;
25、根据识别出的标签值进行查表输出最终的位置估算结果。
26、第二方面,提供了一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行所述的方法中的任一方法。
27、第三方面,提供了一种计算设备,包括:
28、一个或多个处理器、存储器以及一个或多个程序,其中一个或多个程序存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行所述的方法中的任一方法的指令。
29、(三)有益效果
30、(1)本发明一种基于图像识别的永磁同步电机无位置控制系统及方法,通过用图像处理技术和机器学习算法结合,使其能够实现高单精度的位置估算功能。
31、(2)本发明一种基于图像识别的永磁同步电机无位置控制系统及方法,本基于图像识别的无位置控制技术,可用于识别干扰信号。
32、(3)本发明一种基于图像识别的永磁同步电机无位置控制系统及方法,本基于图像识别的无位置控制技术,亦可用于高凸极性电机。
33、(4)本发明一种基于图像识别的永磁同步电机无位置控制系统及方法,对永磁同步电机实现无位置控制,无需额外的位置传感器或编码器,大幅降低了系统成本和体积;同时,基于高频响应信号的图形进行识别的方法具有具备检测和识别微弱位置信息的能力,能准确识别出位置特征的同时也能够有效识别出扰动信号,从而实现高精度和高鲁棒性的控制,可适用于所有永磁同步电机拓扑。
技术特征:
1.一种基于图像识别的永磁同步电机无位置控制系统,其特征在于,包括:
2.根据权利要求1所述的一种基于图像识别的永磁同步电机无位置控制系统,其特征在于:所述电流信号采集模块包括采样电路和ad转换模块,所述采样的电路和ad转换模块分别位于驱动板和控制板上。
3.根据权利要求1所述的一种基于图像识别的永磁同步电机无位置控制系统,其特征在于:所述预处理模块包括滤波模块和成像模块,其中,所述滤波模块用于抑制采样误差,所述成像模块根据训练模型的图像模板要求生成图像,为下一步图像识别,做准备。
4.根据权利要求3所述的一种基于图像识别的永磁同步电机无位置控制系统,其特征在于:所述图像识别模块包括识别存储器和图像识别运算模块,其中,所述识别存储器用于存储模型参数,所述图像识别运算模块基于训练好的识别模型,对当前图像数据进行识别,并输出识别标签值。
5.根据权利要求4所述的一种基于图像识别的永磁同步电机无位置控制系统,其特征在于:所述识别模型的确定,具体包括:
6.根据权利要求5所述的一种基于图像识别的永磁同步电机无位置控制系统,其特征在于:所述判断识别率大小,确定识别模型的结构、参数,具体包括:
7.根据权利要求1所述的一种基于图像识别的永磁同步电机无位置控制系统,其特征在于:所述控制模块包括控制存储器和逻辑运算模块,所述控制存储器用于根据图像识别模块识别出的标签,输出查表值,所述逻辑运算模块用于决定最终的位置估算输出。
8.一种基于图像识别的永磁同步电机无位置控制方法,基于权利要求1-7任意一项所述的一种基于图像识别的永磁同步电机无位置控制系统,其特征在于,包括:
9.一种存储一个或多个程序的计算机可读存储介质,其特征在于,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行根据权利要求8所述的方法中的任一方法。
10.一种计算设备,其特征在于,包括:
技术总结
本发明提供一种基于图像识别的永磁同步电机无位置控制系统及方法,涉及电机控制领域。该基于图像识别的永磁同步电机无位置控制系统,包括:电流信号采集模块,用于收集不同转子位置下的电流数据,用于生成训练数据样本集;预处理模块,用于将收集到的电流数据转换到同步轴系滤波器、带通滤波器提取高频响应电流的负序电流和二次正序高频电流信号,用于生成图像数据;图像识别模块,用于利用图像处理技术和机器学习算法,在模型训练阶段从生成图片中提取出与位置信息关联的特征信息,根据深度学习的结果生成识别模型。解决了对于低凸极率的永磁同步电机运用图像识别技术充分挖掘图像信息中位置特征,实现高精度和高鲁棒性无位置估计的问题。
技术研发人员:徐炜,王恒泓,王激尧,秦岭
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!