自动割草机行驶速度控制方法和系统与流程
本发明属于自动控制,具体涉及一种自动割草机行驶速度控制方法和系统。
背景技术:
1、自动割草机是一种自动对草坪进行修剪切割的智能机器人设备,由于其可以自动执行草坪维护工作,受到人们的广泛欢迎。
2、在实际使用场景中,自动割草机所工作的草坪的长势通常不均匀,草的密度过大容易导致割草电机超负载,切割效果变差。一种现有的自动割草机,为了保障密草的割草效果,通过获取割草电机的负载电流,将负载电流与正常阈值进行比较,若大于正常阈值则降低行驶速度,若负载电流小于等于正常阈值,则维持当前行走速度。然而,在实际应用中,出现负载电流变化较快的情况,割草机频繁的切换行驶速度,出现当前行驶速度与当前负载不匹配的情况,不仅切割效率低,还降低割草机的智能性和用户体验。
3、因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
1、因此,本发明所要解决的是现有技术中自动割草机切割密草效果不佳的技术问题。
2、为解决上述技术问题,本发明提供一种自动割草机行驶速度控制方法,包括:
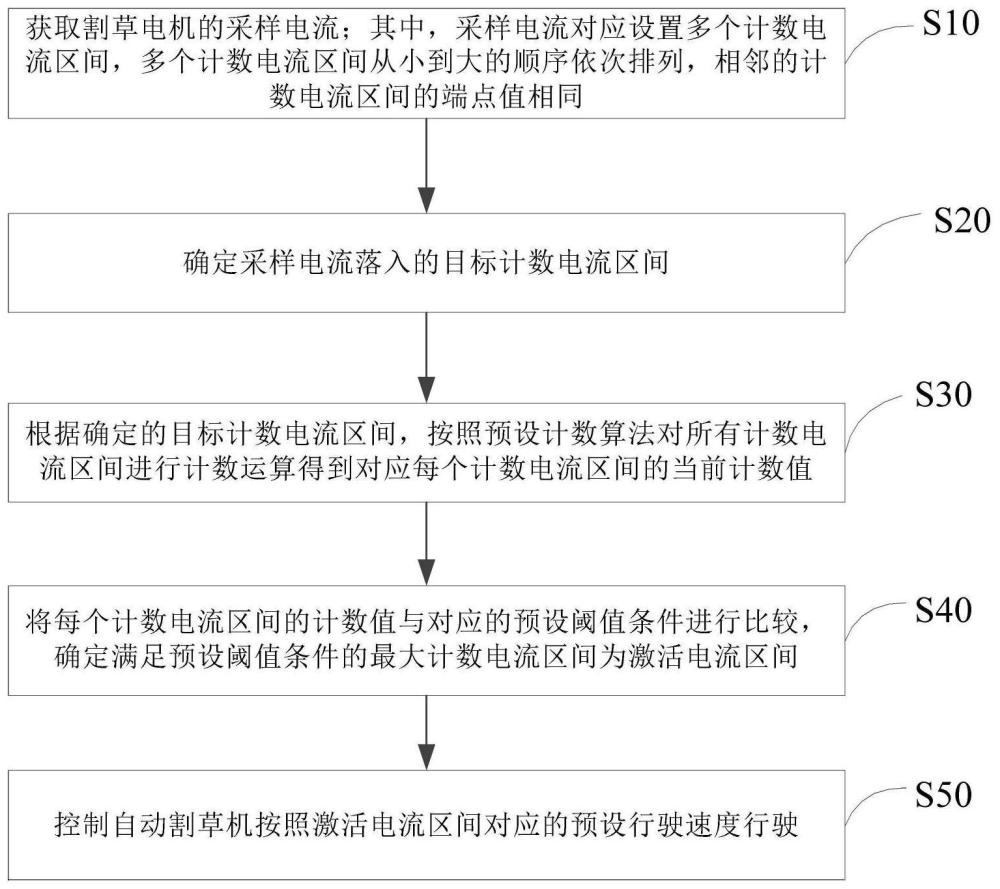
3、获取割草电机的采样电流;其中,所述采样电流对应设置多个计数电流区间,多个所述计数电流区间从小到大的顺序依次排列,相邻的所述计数电流区间的端点值相同;
4、确定所述采样电流落入的目标计数电流区间;
5、根据确定的所述目标计数电流区间,按照预设计数算法对所有所述计数电流区间进行计数运算得到对应每个所述计数电流区间的当前计数值;
6、判断每个所述计数电流区间的所述计数值是否满足对应的预设阈值条件,确定满足预设阈值条件的最大所述计数电流区间为激活电流区间;
7、控制所述自动割草机按照所述激活电流区间对应的预设行驶速度行驶。
8、优选的,每个所述计数电流区间的所述计数值的范围为大于等于零小于等于对应所述计数电流区间的预设上限计数阈值;
9、所述按照预设计数算法对所有所述计数电流区间进行计数运算得到对应每个所述计数电流区间的当前计数值,包括:
10、对所述目标计数电流区间以及小于所述目标计数电流区间的所述计数电流区间的计数值进行加一计数,若所述计数值等于对应的所述预设上限计数阈值,则停止加一计数;对大于所述目标计数电流区间的所述计数电流区间的计数值进行减一计数,若所述计数值等于零,则停止减一计数。
11、优选的,所述预设阈值条件包括激活阈值,所述激活阈值大于零小于对应所述计数电流区间的所述预设上限计数阈值,所述计数电流区间的对应的电流值越大,所述计数电流区间对应的所述预设上限计数阈值和所述激活阈值越小。
12、优选的,所述确定满足预设阈值条件的最大所述计数电流区间为激活计数电流区间,包括:
13、按照电流值从大到小的顺序依次判断所述计数电流区间的所述当前计数值是否大于激活阈值;
14、确定判断结果为是的第一个所述计数电流区间为激活电流区间。
15、优选的,所述确定满足预设阈值条件的最大所述计数电流区间为激活计数电流区间,包括:
16、确定满足对应的所述预设阈值条件的所有所述计数电流区间;
17、确定电流值最大的所述计数电流区间为激活计数电流区间。
18、优选的,所述自动割草机预先设置有对应每个所述计数电流区间的预设行驶速度,所述计数电流区间的电流值越大,对应的所述预设行驶速度越小。
19、优选的,所述采样电流还设置有常态电流区间,所述常态电流区间的电流值小于最小的所述计数电流区间,所述方法还包括:
20、确定所述采样电流是否落入所述常态电流区间;
21、若所述采样电流落入所述常态电流区间范围,对所有所述计数电流区间的计数值进行减一计数;
22、在所有所述计数电流区间的计数值均不满足对应预设阈值条件的情况下,控制所述自动割草机按照所述常态电流区间对应的预设常态行驶速度行驶;其中,所述预设常态行驶速度大于所述计数电流区间对应的预设行驶速度。
23、此外,本发明还提供一种自动割草机行驶速度控制系统,包括:
24、采集模块,用于获取割草电机的采样电流;其中,所述采样电流对应设置多个计数电流区间,多个所述计数电流区间从小到大的顺序依次排列,相邻的所述计数电流区间的端点值相同;
25、目标电流区间确定模块,与所述采集模块连接,用于确定所述采样电流落入的目标计数电流区间;
26、计数值确定模块,与所述目标电流区间确定模块连接,用于根据确定的所述目标计数电流区间,按照预设计数算法对所有所述计数电流区间进行计数运算得到对应每个所述计数电流区间的当前计数值;
27、激活电流区间确定模块,与所述计数值确定模块连接,用于判断每个所述计数电流区间的所述计数值是否满足对应的预设阈值条件,确定满足预设阈值条件的最大所述计数电流区间为激活电流区间;
28、控制模块,与所述激活电流区间确定模块连接,用于控制所述自动割草机按照所述激活电流区间对应的预设行驶速度行驶。
29、优选的,每个所述计数电流区间的所述计数值的范围为大于等于零小于等于对应所述计数电流区间的预设上限计数阈值;
30、所述计数值确定模块,还用于:对所述目标计数电流区间以及小于所述目标计数电流区间的所述计数电流区间的计数值进行加一计数,若所述计数值等于对应的所述预设上限计数阈值,则停止加一计数;对大于所述目标计数电流区间的所述计数电流区间的计数值进行减一计数,若所述计数值等于零,则停止减一计数。
31、优选的,所述预设阈值条件包括激活阈值,所述激活阈值大于零小于对应所述计数电流区间的预设上限计数阈值,所述计数电流区间的对应的电流值越大,所述计数电流区间对应的所述预设上限计数阈值和所述激活阈值越小。
32、本发明提供的技术方案,具有以下优点:
33、本发明提供的自动割草机行驶速度控制方法和系统,预先将割草电机的电流划分为多个计数电流区间,根据获取的割草电机的采样电流的值,确定落入的目标计数电流区间,按照预设计数算法对所有计数电流区间进行计数运算得到对应每个计数电流区间的当前计数值,确定满足预设阈值条件的最大的计数电流区间为激活电流区间,控制自动割草机按照激活电流区间对应的预设行驶速度行驶。
34、如此设置的好处是,采用对割草电机的电流进行分区间计数的方式,每个计数电流区间的当前计数值均与每一次采样电流的大小分布情况相关,可以统计割草电机的采样电流的大小分布情况,将采样电流分布最能体现当前草况密度的计数电流区间确定为激活电流区间,将行驶速度控制为对应激活电流区间的预设行驶速度,由于激活电流区间的确定基于历史和当前采样电流分布情况,不会发生突变和频繁变化的情况,使得自动割草机行驶速度动态的匹配草况密度,降低割草电机堵转造成的漏割,提高了草坪切割平整度。
技术特征:
1.一种自动割草机行驶速度控制方法,其特征在于,包括:
2.根据权利要求1所述的自动割草机行驶速度控制方法,其特征在于,每个所述计数电流区间的所述计数值的范围为大于等于零小于等于对应所述计数电流区间的预设上限计数阈值;
3.根据权利要求2所述的自动割草机行驶速度控制方法,其特征在于,所述预设阈值条件包括激活阈值,所述激活阈值大于零小于对应所述计数电流区间的所述预设上限计数阈值,所述计数电流区间的对应的电流值越大,所述计数电流区间对应的所述预设上限计数阈值和所述激活阈值越小。
4.根据权利要求3所述的自动割草机行驶速度控制方法,其特征在于,所述确定满足预设阈值条件的最大所述计数电流区间为激活计数电流区间,包括:
5.根据权利要求3所述的自动割草机行驶速度控制方法,其特征在于,所述确定满足预设阈值条件的最大所述计数电流区间为激活计数电流区间,包括:
6.如权利要求1所述的自动割草机行驶速度控制方法,其特征在于,所述自动割草机预先设置有对应每个所述计数电流区间的预设行驶速度,所述计数电流区间的电流值越大,对应的所述预设行驶速度越小。
7.如权利要求1所述的自动割草机行驶速度控制方法,其特征在于,所述采样电流还设置有常态电流区间,所述常态电流区间的电流值小于最小的所述计数电流区间,所述方法还包括:
8.一种自动割草机行驶速度控制系统,其特征在于,包括:
9.根据权利要求8所述的自动割草机行驶速度控制系统,其特征在于,每个所述计数电流区间的所述计数值的范围为大于等于零小于等于对应所述计数电流区间的预设上限计数阈值;
10.根据权利要求9所述的自动割草机行驶速度控制系统,其特征在于,所述预设阈值条件包括激活阈值,所述激活阈值大于零小于对应所述计数电流区间的预设上限计数阈值,所述计数电流区间的对应的电流值越大,所述计数电流区间对应的所述预设上限计数阈值和所述激活阈值越小。
技术总结
本发明公开的自动割草机行驶速度控制方法和系统,该方法通过预先将割草电机的电流划分为多个计数电流区间,根据获取的割草电机的采样电流的值,确定落入的目标计数电流区间,按照预设计数算法对所有计数电流区间进行计数运算得到对应每个计数电流区间的当前计数值,确定满足预设阈值条件的最大的计数电流区间为激活电流区间,控制自动割草机按照激活电流区间对应的预设行驶速度行驶。如此使得自动割草机行驶速度动态的匹配草况密度,降低割草电机堵转造成的漏割,提高了草坪切割平整度。
技术研发人员:林利
受保护的技术使用者:上海昶氪科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!